
Abstract
Background
Habitat loss is a key threat to the survival of many species. Habitat selection studies provide key information for conservation initiatives by identifying important habitat and anthropogenic characteristics influencing the distribution of threatened species in changing landscapes. However, assumptions about the homogeneity of individual choices on habitat, regardless of life stage, are likely to result in inaccurate assessment of conservation priorities. This study addresses a knowledge gap in how animals at different life stages diverge in how they select habitat and anthropogenic features, using a free-ranging population of African wild dogs living in a human-dominated landscape in Kenya as a case study. Using GPS collar data to develop resource selection function and step selection function models, this study investigated differences between second order (selection of home range across a landscape) and third order (selection of habitat within the home range) habitat selection across four life history stages when resource requirements may vary: resident-non-denning, resident-heavily-pregnant, resident-denning and dispersing.
Results
Wild dogs showed strong second order selection for areas with low human population densities and areas close to rivers and roads. More rugged areas were also generally selected, as were areas with lower percentage tree cover. The strength of selection for habitat variables varied significantly between life stages; for example, dispersal groups were more tolerant of higher human population densities, whereas denning and pregnant packs were least tolerant of such areas.
Conclusions
Habitat selection patterns varied between individuals at different life stages and at different orders of selection. These analyses showed that denning packs and dispersal groups, the two pivotal life stages which drive wild dog population dynamics, exhibited different habitat selection to resident-non-breeding packs. Dispersal groups were relatively tolerant of higher human population densities whereas denning packs preferred rugged, remote areas. Evaluating different orders of selection was important as the above trends may not be detectable at all levels of selection for all habitat characteristics. Our analyses demonstrate that when life stage information is included in analyses across different orders of selection, it improves our understanding of how animals use their landscapes, thus providing important insights to aid conservation planning.
Similar content being viewed by others

Background
Habitat loss and fragmentation are among the leading causes of global biodiversity loss [1, 2]. To reduce further biodiversity loss, it is important to know which elements of a habitat must be preserved for threatened species to persist [3, 4]. This information is of particular importance in areas where the resource needs of vulnerable local people must be balanced against the conservation of wildlife with which they share a landscape [5, 6]. Where this information is available, it can be incorporated into land-use planning to aid successful coexistence between people and wildlife [4, 7, 8].
Among the groups of species most threatened by the deleterious effects of habitat loss and fragmentation are large-bodied mammals [9, 10], and in particular large carnivores [11, 12]. Larger-bodied species tend to have larger home ranges [13] and therefore need large areas of contiguous, suitable habitat in order to survive. Large carnivore species are often able to survive in a wide variety of habitats and may be able to adapt their behaviour and thereby persist in altered habitats [14]. Nonetheless, large carnivores are particularly at risk from habitat loss because, in addition to having large home ranges, they also tend to be under high levels of threat where they come into contact with humans [12, 15]. In areas where humans and carnivores live in close proximity, carnivores are often at risk of being killed by people because they are perceived, or prove, to be a threat to livestock and/or people [16, 17]. Therefore while carnivores may be able to cross through, or use, areas of altered habitat, they are likely to be at high risk when doing so [18,19,20]. Understanding the habitat requirements of such species is often a key step in designing conservation strategies, including human-wildlife conflict mitigation and landscape connectivity planning [21].
Whilst the importance of understanding animals’ habitat selection behaviour is generally recognised, the study of how animals select habitat in relation to different behaviours or life stages is relatively new [22]. Many habitat selection studies focus on the preferences of adult and/or resident individuals or groups, because this age group is usually the easiest to study and, as it is the life stage during which reproduction occurs, is important for population persistence [22]. Whilst understanding the habitat requirements of this life stage is essential, there is increasing recognition that understanding the habitat selection of individuals in other life stages is also important as they may have different requirements and therefore prefer different habitats [22]. A clear example of this is shown by studies of habitat connectivity – resident adults usually remain in their established home ranges and seldom go on long excursions, whereas dispersing individuals may travel large distances in search of mates and new territories [23]. Dispersal, where individuals leave their natal range to establish territories elsewhere, is likely to be the life stage where connectivity between remnant populations is most vital and hence needs to be considered in understanding how habitat selection by these individuals contributes to connectivity.
In addition to accounting for varying selection at different life stages, it is also important to look at different scales of selection. Habitat selection can be classified into three scales [24]; first order selection refers to the geographic range of a species; second order selection is the choice of home range within the species’ geographic range [24]. Third order selection refers to the use of habitat within an animal’s home range [24]. Many studies focus on the habitat selection exhibited at one order rather than several [25]. However, preferences may vary across orders of selection, therefore restricting analyses to only one hierarchical level could result in a species’ habitat preferences not being fully understood [26, 27].
African wild dogs
The African wild dog, Lycaon pictus, is an extremely wide-ranging large carnivore; resident packs have been recorded as having territories of over 2000 sq. km [28, 29]. Wild dogs are found in a wide variety of different habitat types, ranging from short grass plains to upland forest [30]. Currently categorised as Endangered by the IUCN Red List; habitat loss, disease and deliberate killing have been the major causes of their decline [30]. Wild dogs are often killed in retaliation for depredation of livestock, and they are particularly vulnerable to diseases such as rabies which they may contract from domestic dogs [31, 32]. Wild dogs have been extirpated from up to 93% of their former resident range [33,34,35]; much of the species’ remaining range is outside of protected areas, hence further habitat loss and increasing contact with people, livestock and domestic dogs, are persistent threats [33,34,35].
Wild dogs are obligate cooperative breeders, and pups stay with their natal pack until they reach approximately 2 years of age [36,37,38]. Once they reach sexual maturity most wild dogs leave their natal packs in single sex dispersal groups [37, 38]; these groups often travel very long distances [39] before successfully establishing new packs. Dispersal groups are often more wide-ranging than resident packs and are therefore likely to also have differing habitat preferences. Dispersal is an important factor in wild dog population dynamics as it is the process by which new packs are formed [40]; understanding the habitat preferences of individuals in this life stage is likely to be instrumental to successfully prioritising conservation interventions. This has been suggested in previous work on habitat selection by dispersing and resident African wild dogs; however past studies have relied on opportunistic sightings, which can suffer from detection bias, and crude methods of assigning dispersal status or small sample sizes which have prevented direct analysis of dispersal group preferences [41, 42].
This study investigates factors affecting wild dog select habitat selection in relation to anthropogenic and geographical features in a human-dominated landscape; in particular evaluating whether wild dogs select habitats differently across life stages and orders of selection.
Results
Second order habitat selection
Resource selection functions revealed that the habitat characteristics of wild dog locations were significantly different from those of randomly generated points across the landscape, showing strong evidence of habitat selection (Table 1). At all life stages there was a significant preference for areas with low human population densities, low percentage tree cover and areas close to roads and rivers (Table 1 & Fig. 1). However, whilst denning packs and dispersal groups selected for more rugged areas, packs with heavily pregnant alpha females and resident packs did not (Table 1).

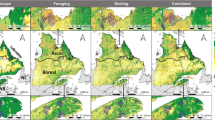
Comparison of mean values for wild dog GPS locations compared to habitat variables. Legend: (a) distance to nearest river, (b) distance to nearest road, (c) human population density, (d) percentage tree cover and (e) terrain ruggedness index. Wild dog location data are shown by circles with line ± SEM, SSF simulated values (third order habitat selection) are shown by triangles with lines ± SEM and landscape level average of available habitat (second order habitat selection) is shown by solid line ± SEM shown by dash-dot line
Although wild dogs preferred similar habitat characteristics at all life stages, the strength of this preference varied significantly between life stages (Table 1 & Table 2). Dispersal groups showed a degree of selection for areas with low human population density similar to that of resident packs (Table 2; “available” habitat mean: 42.6 people per sq. km, SEM: 0.96; Dispersal groups’ locations mean: 15.1 people per sq. km, SEM: 0.55; Resident packs’ locations mean: 13.9 people per sq. km, SEM: 0.35; Pregnant packs’ locations mean: 7.9 people per sq. km, SEM: 0.22; Denning packs’ locations mean: 7.7 people per sq. km, SEM: 0.16). Avoidance of high human population densities was significantly greater for denning and pregnant packs than for resident or dispersing wild dogs (Table 2).
All life stages preferred areas close to roads, with the strongest preference shown by dispersal groups and the weakest by denning packs (Table 1 & Table 2). All life stages also preferred areas close to rivers, the strongest selection was shown by pregnant packs (packs with heavily pregnant alpha females) and resident packs, the weakest selection was by denning packs (Table 1 & Table 2).
Wild dogs at all life stages avoided areas with high percentage tree cover (Table 1), with denning packs showing the strongest avoidance (Table 2). Pregnant packs showed stronger avoidance than did resident packs and dispersal groups showed the weakest avoidance (Table 2).
Packs with heavily pregnant alpha females, as well as resident packs, showed no significant selection preferences with respect to terrain ruggedness (Table 1). Dispersal groups preferred more rugged areas; however the strongest effect was seen with denning packs which strongly selected more rugged areas (Table 2).
Third order habitat selection
Step selection functions showed that, overall, wild dogs had third order habitat selection patterns (within their home ranges) similar to those they showed at second order (a landscape scale). The direction of selection (whether the wild dogs selected for or against a habitat characteristic) was generally the same, however wild dogs showed significant selection for some habitat variables at the second order that were not significantly selected at third order, and vice versa (Table 1 & Table 3).
Wild dog third order habitat selection was significantly affected by human population density for all life stages (Table 3). Denning, pregnant and resident packs as well as dispersal groups all showed a significant preference for areas with low human population densities, as in the second order selection analyses. These life stages also showed a significant preference for areas closer to rivers (Table 3). Proximity to roads was only a significant factor for dispersal groups and resident packs (Table 3). None of the life stages showed significant selection with respect to percentage tree cover at the third order of selection; whereas all life stages showed significant preference for more rugged areas within their home ranges (third order selection).
Discussion
This study found evidence suggesting that African wild dogs consistently preferred particular habitats; however the strength of this preference differed across life stages and orders of selection. Wild dogs preferred areas close to rivers and roads, but with low human population densities, low percentage tree cover and low levels of terrain ruggedness. Although the direction of selection (i.e. preference or avoidance) was similar across life stages, the magnitude of selection varied significantly. Habitat selection was broadly consistent across second order (home range) selection, and third order (within home range) selection. However the models revealed that some habitat features, for example low percentage tree cover, which wild dogs had significantly preferred at second order selection did not significantly affect third order (within home range) selection or vice versa.
Wild dogs strongly avoided areas with high human population densities across all life history stages and at both orders of selection (Fig. 1c). These results suggest that wild dogs may be able to coexist with local communities through avoidance of areas with high human densities [43]. Wild dogs in Laikipia live at comparatively high population densities relative to wild dog populations elsewhere in Africa [44], and yet there are only low levels of conflict with the local human population and low levels of livestock depredation reported [32]. These low levels of conflict may be in part due to the avoidance of the more human-dominated parts of the landscape.
Wild dogs in Laikipia selected areas closer to roads across all life history stages at the second order level of selection, however non-denning packs and dispersal groups also preferred such areas at third order selection. Wild dog selection for areas close to roads has been observed by other studies [22, 29]. The roads included in the analysis in Woodroffe [29] were smaller, private bush roads used to travel within properties, whereas in this study the roads were main roads and part of Kenya’s wider road network. Although the majority of these main roads are not paved, and instead have murram surfaces, they are important transport routes between the towns and properties in and around Laikipia. Nonetheless, despite having a greater volume of traffic than the private roads, wild dogs were found to select for areas closer to these roads. Much of Laikipia is covered by relatively thick Acacia bushland, and it is likely that the wild dog population uses roads as an easy route for travelling through the vegetation [29]. This inclination for using areas close to roads is unusual; many wildlife species avoid roads [45]. Across a wide variety of taxa roads have been shown to act as important movement barriers [46,47,48,49,50]. However, some other canid species have been shown to use roads or tracks made by humans to facilitate movement across landscapes. For example both wolves and coyotes are known to use the compacted snow left by snowmobile trails to move through areas with deep snow cover more easily [51, 52]. Wild dogs’ propensity for using roads to travel around their landscapes has conservation implications as it puts wild dogs at risk from being killed by road traffic [53]. The relatively high risk of roadkill in this species has led to its inclusion as a significant threat in regional strategies and national plans for wild dog conservation [33,34,35].
Some variables significantly affected wild dog habitat selection but not across all life stages and orders. For example, percentage tree cover had a significant effect at second order habitat selection, with all life stages selecting for areas with less tree cover, however it was not significant at third order. This may be because by selecting for preferred habitat at one order of selection, there is no need for animals to select at the other. For example, if packs have chosen areas in the landscape with lower levels of percentage tree cover to establish their territories, i.e. avoiding forested areas, then at third order selection there may be no need for further selection as they are already in their preferred habitat.
Although all life stages showed similar patterns of habitat selection, the strength of selection varied between life stages. Denning packs showed significantly stronger preference for areas with lower human population densities, and less attraction to roads, than did dispersal groups or resident packs (Fig. 1). Denning packs were also found in areas that were significantly more rugged than any other life history category. In Laikipia wild dog packs tend to den in rocky areas on the side of steep hills [44], unlike in other areas where it is common for packs to take over holes previously dug by other species such as aardvarks, Orycteropus afer [54, 55]. When packs have pups in the den they are at their most vulnerable – this is because until the pups are old enough to join and follow the rest of the pack, the whole pack is extremely restricted in their movement patterns [56]. In order to provision the pups and their guardians, the pack usually goes out and return from hunting twice a day, behaviour that if noticed by a predator, or human, may lead to discovery of the den. Studies focussing on wild dog den site selection have shown similar patterns of preference, particularly with respect to rugged areas [57, 58].
These results also show evidence of packs changing their habitat selection preferences in the weeks before the alpha female whelps. Packs with heavily pregnant alpha females exhibited habitat selection behaviour which had some similarities with resident packs, for example with respect to distance to rivers and terrain ruggedness, but others that were similar to denning packs, for example being found in areas with lower human population densities. Studies have investigated the effect of gestation on home ranges and movement patterns in species including white-nosed coati, Nasua narica [59] and mule deer Odocoileus hemionus [60], showing that females exhibit significant behavioural changes in the weeks before birth. Previous studies focussing on habitat selection in African wild dogs have tended to focus on the denning period [57, 58], however these results suggest that some behavioural changes begin in the weeks before whelping.
Dispersal groups showed selection behaviour significantly different from that of other life history categories. For example, the average human population densities of dispersal groups’ GPS locations were the highest among the categories investigated (Fig. 1). However, when looking at their second and third order habitat selection, dispersal groups were nonetheless found to select for areas with lower human population densities than expected by chance (Table 1, Table 3 & Fig. 1). That they spend more time in suboptimal habitat could at least partly explain why dispersal groups are recorded travelling extremely long distances before finding new territories and mates [38]. Groups not only need to continue travelling until they meet an opposite sex group with which they can form a new pack, but they then need to find a suitable area to establish their new territory. As dispersers are the group most likely to make these long-distance movements and, as these results show, they have differing habitat selection preferences to other life stages, basing landscape connectivity analyses on data from this life stage may give a more accurate picture of potential movement pathways than using data from resident animals.
This study highlights the importance of considering life history stage when investigating habitat selection behaviour, as wild dog habitat preferences differed across life stages. Other studies have shown behavioural state (e.g., foraging, travelling etc.) to have an important impact on habitat selection, however to date there are still relatively few studies exploring the differences between resident and dispersing groups [22]. The few studies that there have been, have shown important contrasts in habitat selection between resident animals and dispersal groups. For example, Elliot et al. [61] found that dispersing groups of lions travelled across areas that were avoided by adult males and groups of adult females. Jackson et al. [42] also looked at dispersal behaviour in African wild dogs, using opportunistic reports of groups where groups numbering fewer than 9 individuals were assumed to be dispersal groups. That study found significant differences in the habitat characteristics of areas where smaller groups, assumed to be dispersers, and larger groups, assumed to be resident, were found. Both these studies found that there were highly significant differences in projected levels of connectivity depending on whether the connectivity model was based upon the habitat selection preferences of residents or dispersers.
Conclusions
We found that individuals’ life stages, and the scale of selection evaluated, impacted habitat selection patterns. Whilst this study used African wild dogs as a case study, it is likely that similar patterns may be found in other species. Such information is likely to be particularly important for the conservation of threatened species, as individuals may have varying levels of willingness to use altered landscapes depending on their life stage. It is vital for successful prioritisation of conservation interventions to determine if this is the case during key life stages which impact overall population dynamics, such as during reproductive or dispersal behaviours.
Methods
Study area
Laikipia County is a mixed-use, human-dominated landscape in Northern Kenya. It is one of the most important wildlife areas in Kenya, with globally important populations of several endangered species [62]. Although an important area for wildlife, Laikipia has a large and growing human population [63, 64] which is putting increasing pressure on the county’s remaining natural resources. Nevertheless, Laikipia supports among the highest densities of wildlife in Kenya, second only to the Maasai Mara [62].
Wild dog movement data
We used data collected from GPS collars to explore wild dog habitat selection patterns. Between January 2011 and February 2017 18 wild dogs were immobilised and fitted with GPS collars (GPS-plus, Vectronic Aerospace GmbH, Berlin, Germany) as described in [44]. Some individuals were from the same pack; however no two individuals were fitted with GPS collars in the same pack at the same time. Packs are highly cohesive; therefore collaring one individual in each pack (or dispersal group) effectively monitors the movements of all pack members. Individuals were collared for an average of 236 days (range: 114–388 days) before the collar’s battery expired, the individual dispersed and was lost to monitoring, the individual died, or the collar was removed.
Wild dogs are extremely crepuscular [56] and so only data collected during the animals’ active periods at dawn and dusk, when animals are active, were used in these analyses (dawn GPS locations recorded at 06:30 and 08:00; dusk at 18:00 and 19:30). All GPS collar locations where the Dilution of Precision (DoP), a measure of the effect of satellite spatial configuration on the accuracy of the GPS location data [65], was more than 5 (indicating a potentially inaccurate location; approximately 10% of GPS fixes) were excluded from the analysis. GPS fixes with a DoP of more than 5 were associated with higher levels of terrain ruggedness; no other habitat variables (see below) were found to be significantly associated with DoP values above 5.
Wild dog life stage data
Collared wild dogs were visually monitored throughout the study. Frequency of visual observation varied due to logistical constraints but packs were usually sighted at least once every 1–4 weeks throughout the study, when pack size, composition, and reproductive state were recorded. We used these data to determine each collared individual’s life stage. We divided collar data into four categories where resource needs and ranging patterns are likely to differ: resident-non-breeding (hereafter referred to as resident), resident-heavily-pregnant (hereafter referred to as pregnant), resident-denning (hereafter referred to as denning) and dispersing. For further details of life stage categorisation see Additional file 1. Any data where the individual’s life stage could not be confidently assigned to the above categories were excluded from analyses (see Additional file 1 Table S1).
Habitat characteristics
Geographic variables such as terrain ruggedness, tree cover and the locations of rivers often affect carnivore distributions [66,67,68]. However anthropogenic features such as human population density and the presence of roads can also be key factors in carnivore habitat selection [66]. The impacts such factors have may differ as individuals move between life stages, as they may become more or less risk-averse, and may also be dependent on the order of selection investigated.
In this study we investigated wild dog habitat selection in relation to five key habitat variables that are likely to affect movement patterns: human population density, distance to roads, distance to rivers, percentage tree cover and Terrain Ruggedness Index, sourced from publicly available repositories (see Additional file 1 Table S2). These habitat variables were included based on previous studies of habitat selection in wild dogs that have demonstrated their importance during one or more life stages [22, 29, 57, 69].
Second order habitat selection
We analysed second order habitat selection using resource selection function (RSF) models [70]. RSFs model habitat selection by comparing the habitat characteristics of an animal’s observed locations with those of its available habitat, in order to infer which aspects of the habitat significantly affect whether a species is found in an area.
To determine the habitats used by the GPS-collared wild dogs, we used GPS locations recorded by the GPS collars at 08:00 and 19:30; these times correspond with the end of wild dogs’ morning and evening bouts of activity [56]. Only two points were used each day in order to minimise spatial autocorrelation, and these time points correspond with the end of the period each day when wild dogs move the greatest distance [29]. These data were overlaid onto the landscape rasters and their habitat characteristics extracted using the extract function of the raster package in R [71, 72].
We calculated the area available to the wild dogs by drawing a minimum convex polygon around the entire wild dog GPS collar dataset; we determined the central point of this polygon, using the polygon centroids tool in QGIS [73] and drew a circle around it; the radius of which was 90 km, representing the distance between the centre point and the most distant wild dog location (see Additional file 1 Figure S3). There were no movement barriers (eg major roads or rivers) expected to prohibit movement by GPS collared wild dogs across the expanse of this area and the whole area could be considered available to them due to wild dogs’ wide-ranging nature [39]. In order to determine the habitat characteristics of the area available to the wild dogs, we generated 10,000 random points within the “available” area and overlaid them onto the landscape rasters described above. The habitat characteristics of these points were extracted as for the wild dog locations, in order to provide a landscape level average of the habitat “available” to the wild dogs.
We analysed the differences between used and available habitat using generalised linear mixed models (GLMM) with binomial distribution using the lme4 package in R [74]. Whether a location was observed (ie an observed location or a randomly generated point) was used as a binary response variable with human population density, distance to roads, distance to rivers, percentage tree cover and terrain ruggedness index as fixed variables; there were no significant correlations found between habitat variables. Wild dog individual identity as included as a random variable, modelled with random intercepts. We analysed each life history category separately and the resulting coefficients compared using Chi-squared tests.
Third order habitat selection
We analysed third order habitat selection using Step Selection Function (SSF) models [75]. SSFs model habitat selection by comparing the habitat characteristics of an animal’s observed locations with the characteristics of simulated locations, the positions of which are generated based on the animal’s movement patterns. We extracted step lengths and turn angles from the morning (06:30 to 08:00) and evening (18:00 to 19:30) activity bouts from the wild dog GPS collar data (see Additional file 1 Table S3) using the movement.pathmetrics function in the Geospatial Modelling Environment (hereafter referred to as GME [76]). Using the movement.ssfsamples function in GME, 30 simulated steps were generated for each observed step. Simulated steps were generated using the step length and turn angle distributions extracted from the GPS collar data. We then overlaid the locations of the end points of each of each simulated step and its corresponding observed step (the 08:00 location for the 0630-0800 step, and the 19:30 location for the 1800–1930 step) onto the landscape rasters described above. We extracted the habitat characteristics of each point (the observed wild dog GPS locations and the corresponding SSF simulated locations) using the extract function in the raster package in R.
We analysed the differences between the observed locations and their associated simulated locations using a conditional logistic regression. Data for each life history stage (resident, pregnant, denning and dispersing) were analysed separately. We ran regressions using the mclogit function of the mclogit package [77] in R, with human population density, distance to roads, distance to rivers, percentage tree cover and terrain ruggedness as fixed variables. Wild dog individual identity was included as a random variable, modelled using random intercepts.
Availability of data and materials
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- DoP:
-
Dilution of Precision
- GLMM:
-
Generalised Linear Mixed Models
- GPS:
-
Global Positioning System
- RSF:
-
Resource Selection Function
- SEM:
-
Standard Error of the Mean
- sq. km:
-
Square kilometre
- SSF:
-
Step Selection Function
References
Brooks TM, Mittermeier RA, Mittermeier CG, da Fonseca GAB, Rylands AB, Konstant WR, et al. Habitat loss and extinction in the hotspots of biodiversity. Conserv Biol. 2002 Aug;16(4):909–23.
Millennium Ecosystem Assessment. Ecosystems and human well-being: biodiversity synthesis. Washington, DC: World Resources Institute; 2005.
Giam X, Bradshaw CJA, Tan HTW, Sodhi NS. Future habitat loss and the conservation of plant biodiversity. Biol Conserv. 2010 Jul;143(7):1594–602.
Lee TM, Jetz W. Future battlegrounds for conservation under global change. Proc R Soc B Biol Sci. 2008;275(1640):1261–70.
Kaimowitz D, Sheil D. Conserving what and for whom? Why conservation should help meet basic human needs in the tropics. Biotropica. 2007 Sep;39(5):567–74.
Sanderson EW, Redford KH, Vedder A, Coppolillo PB, Ward SE. A conceptual model for conservation planning based on landscape species requirements. Landsc Urban Plan. 2002 Jan;58(1):41–56.
Burdett CL, Crooks KR, Theobald DM, Wilson KR, Boydston EE, Lyren LM, et al. Interfacing models of wildlife habitat and human development to predict the future distribution of puma habitat. Ecosphere. 2010;1(1):art4.
Polasky S, Nelson E, Lonsdorf E, Fackler P, Starfield A. Conserving species in a working landscape: land use with biological and economic objectives. Ecol Appl. 2005;15(4):1387–401.
Cardillo M, Mace GM, Jones KE, Bielby J, Bininda-Emonds ORP, Sechrest W, et al. Multiple causes of high extinction risk in large mammal species. Science. 2005;309(5738):1239.
Fisher DO, Owens IPF. The comparative method in conservation biology. Trends Ecol Evol. 2004;19(7):391–8.
Crooks KR, Burdett CL, Theobald DM, Rondinini C, Boitani L. Global patterns of fragmentation and connectivity of mammalian carnivore habitat. Philosophical Transactions of the Royal Society B: Biological Sciences. 2011;366(1578):2642–51.
Ripple WJ, Estes JA, Beschta RL, Wilmers CC, Ritchie EG, Hebblewhite M, et al. Status and ecological effects of the World’s largest carnivores. Science. 2014;343(6167):–1241484.
Lindstedt SL, Miller BJ, Buskirk SW. Home range, time, and body size in mammals. Ecology. 1986;67(2):413–8.
Beckmann JP, Berger J. Rapid ecological and behavioural changes in carnivores: the responses of black bears (Ursus americanus) to altered food. J Zool. 2003;261(2):207–12.
Woodroffe R, Ginsberg J. Edge effects and the extinction of populations inside protected areas. Science. 1998;280(5372):2126–8.
Andrén H, Linnell JDC, Liberg O, Andersen R, Danell A, Karlsson J, et al. Survival rates and causes of mortality in Eurasian lynx (Lynx lynx) in multi-use landscapes. Biol Conserv. 2006;131(1):23–32.
Ogada MO, Woodroffe R, Oguge NO, Frank LG. Limiting depredation by African carnivores: the role of livestock husbandry. Conserv Biol. 2003;17(6):1521–30.
Bouyer Y, San Martin G, Poncin P, Beudels-Jamar RC, Odden J, Linnell JDC. Eurasian lynx habitat selection in human-modified landscape in Norway: effects of different human habitat modifications and behavioral states. Biol Conserv. 2015;191:291–9.
Bunnefeld N, Linnell JDC, Odden J, van Duijn MAJ, Andersen R. Risk taking by Eurasian lynx (Lynx lynx) in a human-dominated landscape: effects of sex and reproductive status, J Zoology. 2006;0(0):060606025751009 ???
Swanson A, Caro T, Davies-Mostert H, Mills MG, Macdonald DW, Borner M, et al. Cheetahs and wild dogs show contrasting patterns of suppression by lions. J Anim Ecol. 2014;83(6):1418–27.
Klaassen B, Broekhuis F. Living on the edge: Multiscale habitat selection by cheetahs in a human-wildlife landscape. Ecol Evol [Internet]. 2018; 9 [cited 2018 Jul 11]; Available from: http://doi.wiley.com/10.1002/ece3.4269.
Abrahms B, Jordan N, Golabek K, McNutt J, Wilson A, Brashares J. Lessons from integrating behaviour and resource selection: activity-specific responses of African wild dogs to roads. Anim Conserv. 2016;19(3):247–55.
Elliot NB, Cushman SA, Loveridge AJ, Mtare G, Macdonald DW. Movements vary according to dispersal stage, group size, and rainfall: the case of the African lion. Ecology. 2014;95(10):2860–9.
Johnson DH. The comparison of usage and availability measurements for evaluating resource preference. Ecology. 1980;61(1):65–71.
McGarigal K, Wan HY, Zeller KA, Timm BC, Cushman SA. Multi-scale habitat selection modeling: a review and outlook. Landsc Ecol. 2016 Aug;31(6):1161–75.
Bradshaw CJ, Boutin S, Hebert DM, Rippin AB. Winter peatland habitat selection by woodland caribou in northeastern Alberta. Can J Zool. 1995;73(8):1567–74.
Zeller KA, Vickers TW, Ernest HB, Boyce WM. Multi-level, multi-scale resource selection functions and resistance surfaces for conservation planning: Pumas as a case study. Boyce MS, editor. PLoS One. 2017;12(6):e0179570.
Fuller TK, Kat PW. Movements, activity, and prey relationships of African wild dogs (Lycaon pictus) near Aitong, southwestern Kenya. Afr J Ecol. 1990;28(4):330–50.
Woodroffe R. Ranging behaviour of African wild dog packs in a human-dominated landscape. J Zool. 2010 Feb;283(2):88–97.
Woodroffe R, Sillero-Zubiri C. lycaon pictus [Internet]. IUCN; 2012 May [cited 2017 May 4]. (The IUCN Red List of Threatened Species). Available from: http://www.iucnredlist.org/details/12436/0
Woodroffe R, Prager KC, Munson L, Conrad PA, Dubovi EJ, Mazet JAK. Contact with Domestic Dogs Increases Pathogen Exposure in Endangered African Wild Dogs (Lycaon pictus). Getz WM, editor. PLoS One. 2012;7(1):e30099.
Woodroffe R, Lindsey P, Romañach S, Stein A. Ole Ranah SMK. Livestock predation by endangered African wild dogs (Lycaon pictus) in northern Kenya. Biol Conserv. 2005 Jul;124(2):225–34.
IUCN/SSC. Regional conservation strategy for the cheetah and African wild dog in Eastern Africa. IUCN Species Survival Commission, Gland, Switzerland. 2007;
IUCN/SSC. Regional Conservation Strategy for the Cheetah and African Wild Dog in Western, Central and Northern Africa. Gland: IUCN Species Survival Commission; 2012.
IUCN/SSC. Review of the regional conservation strategy for the cheetah and African wild dog in Southern Africa. Gland: IUCN Species Survival Commission; 2015.
Fuller TK, Kat PW, Bulger JB, Maddock AH, Ginsberg JR, Burrows R, et al. Population dynamics of African wild dogs. In: Wildlife 2001: populations. Springer. 1992:1125–39.
McNutt JW. Sex-biased dispersal in African wild dogs Lycaon pictus. Anim Behav. 1996;52(6):1067–77.
Woodroffe R, Rabaiotti D, Ngatia DK, Smallwood TRC, Strebel S, O’Neill HMK. Dispersal behaviour of African wild dogs in Kenya. Afr J Ecol. 2019;00:1–12.
Davies-Mostert HT, Kamler JF, Mills MG, Jackson CR, Rasmussen GS, Groom RJ, et al. Long-distance transboundary dispersal of African wild dogs among protected areas in southern Africa. Afr J Ecol. 2012;50(4):500–6.
Woodroffe R, O’Neill H, Rabaiotti D. Within- and between-group dynamics in an obligate cooperative breeder. Journal of Animal Ecology [Internet]. 2019 11 [cited 2019 Sep 13]; Available from: https://onlinelibrary.wiley.com/doi/abs/10.1111/1365-2656.13102
Abrahms B, Sawyer SC, Jordan NR, McNutt JW, Wilson AM, Brashares JS. Does wildlife resource selection accurately inform corridor conservation? Hayward M, editor. J Appl Ecol. 2017 Apr;54(2):412–22.
Jackson CR, Marnewick K, Lindsey PA, Røskaft E, Robertson MP. Evaluating habitat connectivity methodologies: a case study with endangered African wild dogs in South Africa. Landsc Ecol. 2016;31(7):1433–47.
Woodroffe R, Donnelly CA. Risk of contact between endangered African wild dogs Lycaon pictus and domestic dogs: opportunities for pathogen transmission: contact between domestic and wild dogs. J Appl Ecol. 2011;48(6):1345–54.
Woodroffe R. Demography of a recovering African wild dog (Lycaon pictus) population. J Mammal. 2011;92(2):305–15.
Forman RT. Road ecology: science and solutions: Island Press; 2003.
Dyer SJ, O’Neill JP, Wasel SM, Boutin S. Quantifying barrier effects of roads and seismic lines on movements of female woodland caribou in northeastern Alberta. Can J Zool. 2002;80(5):839–45.
Mader H-J. Animal habitat isolation by roads and agricultural fields. Biol Conserv. 1984;29(1):81–96.
Marsh DM, Milam GS, Gorham NP, Beckman NG. Forest roads as partial barriers to terrestrial salamander movement. Conserv Biol. 2005;19(6):2004–8.
McGregor RL, Bender DJ, Fahrig L. Do small mammals avoid roads because of the traffic? J Appl Ecol. 2008;45(1):117–23.
Waller JS, Servheen C. Effects of transportation infrastructure on grizzly bears in northwestern Montana. J Wildl Manag. 2005;69(3):985–1000.
Gese EM, Dowd JLB, Aubry LM. The Influence of Snowmobile Trails on Coyote Movements during Winter in High-Elevation Landscapes. Hayward M, editor. PLoS One. 2013 ;8(12):e82862.
Paquet PC, Alexander S, Donelon S, Callaghan C. Influence of anthropogenically modified snow conditions on wolf predatory behaviour. The World of Wolves: New Perspectives on Ecology, Behaviour, and Management. 2010:157–74.
van der Meer E, Fritz H, Blinston P, Rasmussen GSA. Ecological trap in the buffer zone of a protected area: effects of indirect anthropogenic mortality on the African wild dog Lycaon pictus. Oryx. 2014 Apr;48(02):285–93.
Creel S, Creel NM. The African wild dog: behavior, ecology, and conservation: Princeton University Press; 2002.
Robbins RL, McCreery EK. African wild dog pup vocalizations with special reference to Morton’s model. Behaviour. 2003;140(3):333–51.
Woodroffe R, Groom R, McNutt JW. Hot dogs: High ambient temperatures impact reproductive success in a tropical carnivore. Wilson K, editor. J Anim Ecol [Internet]. 2017 [cited 2017 Jul 20]; Available from: http://doi.wiley.com/10.1111/1365-2656.12719
Jackson CR, Power RJ, Groom RJ, Masenga EH, Mjingo EE, Fyumagwa RD, et al. Heading for the Hills: Risk Avoidance Drives Den Site Selection in African Wild Dogs. Cameron EZ, editor. PLoS One. 2014;9(6):e99686.
van der Meer E, Mpofu J, Rasmussen GS, Fritz H. Characteristics of African wild dog natal dens selected under different interspecific predation pressures. Mammalian Biology-Zeitschrift für Säugetierkunde. 2013;78(5):336–43.
Valenzuela D, Ceballos G. Habitat selection, home range, and activity of the White-nosed coati (Nasua Narica) in a Mexican tropical dry Forest. J Mammal. 2000 Aug;81(3):810–9.
Long RA, Kie JG, Terry Bowyer R, Hurley MA. Resource selection and movements by female mule deer Odocoileus hemionus : effects of reproductive stage. Wildl Biol. 2009 Sep;15(3):288–98.
Elliot NB, Cushman SA, Macdonald DW, Loveridge AJ. The devil is in the dispersers: predictions of landscape connectivity change with demography. Pettorelli N, editor. J Appl Ecol [Internet]. 2014;51(5):1169–1178. [cited 2017 May 18] Available from: http://doi.wiley.com/10.1111/1365-2664.12282
Kinnaird MF, O’Brien TG. Effects of private-land use, livestock management, and human tolerance on diversity, distribution, and abundance of large African mammals: livestock and large mammals in Kenya. Conserv Biol. 2012 Dec;26(6):1026–39.
Kenya National Bureau of Statistics. Population and Housing Census 1969 [Internet]. 1969 [cited 2017 Feb 23]. Available from: https://www.knbs.or.ke/?option=com_phocadownload&view=category&id=102%3Apopulation-and-housing-census-1969&Itemid=599
Kenya National Bureau of Statistics. Population and Housing Census 2009 [Internet]. 2009 [cited 2017 Feb 23]. Available from: http://www.knbs.or.ke/index.php?option=com_phocadownload&view=category&id=109:population-and-housing-census-2009&Itemid=599
Langley RB. Dilution of precision. GPS world. 1999;10(5):52–9.
Carroll C, McRAE BH, Brookes A. Use of linkage mapping and centrality analysis across habitat gradients to conserve connectivity of gray wolf populations in Western North America. Conserv Biol. 2012 Feb;26(1):78–87.
May R, van Dijk J, Wabakken P, Swenson JE, Linnell JDC, Zimmermann B, et al. Habitat differentiation within the large-carnivore community of Norway’s multiple-use landscapes. J Appl Ecol. 2008;45(5):1382–91.
White TH, Bowman JL, Leopold BD, Jacobson HA, Smith WP, Vilella FJ. Influence of Mississippi alluvial valley rivers on black bear movements and dispersal: implications for Louisiana black bear recovery. Biol Conserv. 2000;95(3):323–31.
Whittington-Jones BM, Parker DM, Bernard RTF, Davies-Mostert HT. Habitat selection by transient African wild dogs ( Lycaon pictus ) in northern KwaZulu-Natal, South Africa: implications for range expansion. S Afr J Wildl Res. 2014;44(2):135–47.
Manly BFJ, McDonald LL, Thomas DL, McDonald TL, Erickson WP. Resource selection by animals: statistical design and analysis for field studies. 2nd ed. Dordrecht. Boston: Kluwer Academic Publishers; 2002. 221 p.
Hijmans RJ. raster: Geographic Data Analysis and Modeling [Internet]. 2015. Available from: https://CRAN.R-project.org/package=raster
Core R. Team. R: a language and environment for statistical computing [internet]. Vienna, Austria: R Foundation for statistical. Computing. 2016; Available from: https://www.R-project.org/.
QGIS Development team. QGIS Geographic Information System. Open Source Geospatial Foundation Project. 2012;
Bates D, Mächler M, Bolker B, Walker S. Fitting Linear Mixed-Effects Models Using lme4. J Stat Softw [Internet]. 2015;67(1) [cited 2017 Aug 11] Available from: http://www.jstatsoft.org/v67/i01/.
Fortin D, Beyer HL, Boyce MS, Smith DW, Duchesne T, Mao JS. Wolves influence elk movements: behavior shapes a trophic cascade in Yellowstone National Park. Ecology. 2005;86(5):1320–30.
Beyer HL. Geospatial modelling environment [internet]. 2010. Available from: http://www.spatialecology.com/gme/
Elff M. mclogit: Mixed Conditional Logit [Internet]. 2014. Available from: https://CRAN.R-project.org/package=mclogit
Acknowledgements
We thank the landowners and communities within our study site for hosting our research, Kenya Wildlife Service for collaboration and the Kenya National Council for Science and Technology for research permission. We also thank research assistants too numerous to list individually.
Funding
This work was funded through a UCL IMPACT PhD studentship and private fundraising. The research used field data collected by Samburu-Laikipia Wild Dog Project over a period of 16 years, during which time long-term project funding was provided from sources too numerous to list individually. The authors confirm that none of these funders played any role in the design of this study, nor did they contribute to the collection, analysis, or interpretation of data, or writing the manuscript.
Author information
Authors and Affiliations
Contributions
HMKO collected data, conducted analyses and drafted the manuscript. SD and RW helped formulate the study question. RW contributed long-term field data. All authors provided manuscript comments and gave final approval for submission.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Wild dogs were captured and handled as described in Woodroffe (2011) in collaboration with the Kenya Wildlife Service, with permission from the Kenyan Ministry of Science and Technology, according to guidelines of the IUCN/SSC Canid Specialist Group and in conformity with the guidelines of the American Society of Mammalogists (Gannon et al. 2007), following a protocol approved by the Ethics Committee of the Zoological Society of London. This work was conducted under Kenya National Council for Science and Technology permit NACOSTI/P/14/9920/1659.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Additional file 1:
Wild dog life stage categorisation details. Figure S1. Maps showing 7 days of movement data from a GPS collared wild dog during a resident-non-breeding life stage and a resident-denning life stage. Figure S2. Minimum convex polygons drawn around weekly GPS collar data from a wild dog defined as dispersing and resident. Figure S3. Diagram showing how available habitat was determined for the second order habitat selection analysis. Table S1. Number of days of data included in analyses for each life stage. Table S2. Habitat characteristics rasters. Table S3. Mean step lengths of different life stages for 90 min morning and evening activity periods.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated.
About this article

Cite this article
O’Neill, H.M.K., Durant, S.M. & Woodroffe, R. What wild dogs want: habitat selection differs across life stages and orders of selection in a wide-ranging carnivore. BMC Zool 5, 1 (2020). https://doi.org/10.1186/s40850-019-0050-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40850-019-0050-0