
Abstract
Background
Monitoring forest health and biomass for changes over time in the global environment requires the provision of continuous satellite images. However, optical images of land surfaces are generally contaminated when clouds are present or rain occurs.
Methods
To estimate the actual reflectance of land surfaces masked by clouds and potential rain, 3D simulations by the RAPID radiative transfer model were proposed and conducted on a forest farm dominated by birch and larch in Genhe City, DaXing’AnLing Mountain in Inner Mongolia, China. The canopy height model (CHM) from lidar data were used to extract individual tree structures (location, height, crown width). Field measurements related tree height to diameter of breast height (DBH), lowest branch height and leaf area index (LAI). Series of Landsat images were used to classify tree species and land cover. MODIS LAI products were used to estimate the LAI of individual trees. Combining all these input variables to drive RAPID, high-resolution optical remote sensing images were simulated and validated with available satellite images.
Results
Evaluations on spatial texture, spectral values and directional reflectance were conducted to show comparable results.
Conclusions
The study provides a proof-of-concept approach to link lidar and MODIS data in the parameterization of RAPID models for high temporal and spatial resolutions of image reconstruction in forest dominated areas.
Similar content being viewed by others


Background
Optical remote sensing images have been widely used in monitoring forest ecosystems. Spatial, temporal and spectral resolutions are the three key indicators to be considered during most applications. Spatial resolution had been improved from a scale of hundreds of meters (e.g. Landsat 8) to one of a half-meter (e.g. GeoEye-1 or Worldview-2) with only a slight increase in the number of spectral bands. However, in forested area, temporal resolution is generally reduced by frequent rains or cloud covers, which prevents users from continuously acquiring clear optical remote sensing images.
Temporally continuous satellite images are important for forest monitoring (Lunetta et al. 2004; Masek et al. 2008; Nitze et al. 2015) since forest reflectance varies with seasonality (Kobayashi et al. 2007; Xu et al. 2013). A few studies have been conducted to interpolate those contaminated images by rains or clouds. For example, Landsat images have been blended with MODerate-resolution Imaging Spectroradiometer (MODIS) data to create spatial and temporal fusion data (Gao et al. 2006; Hilker et al. 2009; Wu et al. 2012). Further, radiative transfer models have also been used to simulate a series of high temporal resolution images for future space earth observation missions (Inglada et al. 2011). However, spatial resolution is generally moderate due to the use of simple homogeneous radiative transfer models, which are not able to deal with high resolution simulation with diverse tree species and mountain shadows.
In recent years, light detection and ranging (lidar) has been a widely used tool for forest studies (Adams et al. 2012; Arno et al. 2013; Montesano et al. 2013). The greatest advantage of lidar is to provide direct measurements of very detailed 3D forest structures, so it can be used to reconstruct 3D trees to support the simulation of radar remote sensing signals (Lucas et al. 2006) and to study how 3D structures affect the quality of optical images (Barbier et al. 2011). By coupling lidar with high temporal data such as MODIS using 3D radiative transfer models, it will be possible to generate both high spatial and temporal resolution optical remote sensing images. However, very few studies were found using this approach. Therefore, we will test the possibility of that approach to simulate high-resolution optical satellite images on an arbitrary day of the growing season in a forested area.
Methods
Study site
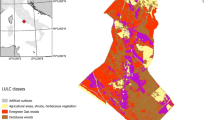
The study site (Fig. 1), located in a 100 ha forested area (50°54′ N, 121°54′ E) of the Genhe Forestry Reserve, DaXing’AnLing Mountain in Inner Mongolia, China, belongs to a boreal moist and cold temperature forest, with an elevation ranging from 784 to 1142 m. Annual average precipitation is 450 to 550 mm, with sixty per cent falling in July and August. Annual average sunshine is 2594 h with a frost-free period of 80 days. Our study site occupied 75 % of the total area. The forest is mainly composed of Dahurian Larch (Larix gmelinii) and White Birch (Betula platyphylla Suk.). The understory vegetation of the larch forest is a single layer of evergreen shrubs (normally Ledum palustre L. or Rhododendron dauricum L.). L. palustre is generally a low shrub (less than 0.3 m), while the height of R. dauricum is around 1.5 m. Blueberries (Semen trigonellae) are widely distributed. The birch forest has a understory of grass or deciduous shrubs, such as Rosa acicularis, Spiraea sericea Turcz., or Rubus L.

Location of the Genhe study site in DaXing’AnLing Mountain, Inner Mongolia, China
The growing season typically begins in early May and senescence occurs in late September. In the summer of 2013, 18 field plots (45 m by 45 m) were established representing different combinations of forest types, density and leaf area index (LAI) (Table 1). The LAI, ranging from 1.44 to 3.51 m2∙m−2, was measured using LAI-2000 (LICOR Inc.) hemispheric data. The forest cover varies between 0.21 and 0.86.
Based on inventory data of individual tree structures in plots L1 to L9, the DBH and crown length (L) of trees were regressed on tree height (H), where heights were derived by lidar. For convenience, both crowns of larch and birch are defined as spherical in shape.
Reflectance or transmittance spectra of leaves, branches and stems of birch and larch trees were measured in the field using the integrating sphere of ASD (Analytical Spectral Device, http://www.asdi.com/). Dry and wet soil spectra were the default soil spectra in a PROSAIL model (Jacquemoud et al. 2009). The re-sampled spectral curves are shown in Fig. 2.

Component reflectance in 18 bands
Airborne data
Small footprint full-waveform lidar data were acquired from August 16 to September 25 in 2012 (Mu et al. 2015). The system consisted of a Leica ALS60 with an integrated Leica RCD105 camera. The CCD camera produced natural color mosaic images with 0.2 m resolution. As for lidar, the mean swath width was 1 km at a flying altitude of approximately 2700 m (over rough terrain). The scan angle was less than 35°. Waveforms were digitized with a frequency of 100 to 200 kHz. An average of eight reflected pulses per m2 was obtained over the sample plots. Point clouds were first classified by the TerraScan software (see www.terrasolid.com) to separate the ground points from other points. We used Delaunay triangulation and bilinear interpolation method to generate a digital elevation model (DEM) from ground returns. DSM (digital surface model) was created using a maximum value in a window size of 0.5 m. CHM (canopy height model) was calculated as the difference between DSM and DEM (Fig. 3).

Lidar derived CHM and DEM (1 km): a CHM, gray color representing tree height 0–30 m; b DEM, gray color representing elevation 770–895 m
Individual tree crowns were segmented from CHM using the “TreeVaW” tool (Popescu and Wynne 2004), which uses a circular window filter to segment trees and produces the location of each tree (x i , y i ), height (H i ) and crown radius (R i ).
Optical satellite images
Several scales of geo-referenced satellite images were used, including SPOT-6 (1 m), Landsat (30 m) and MODIS (250 m). Due to frequent cloud cover, SPOT and Landsat were not able to capture clear land surface images during rainy days, which happened mostly in the growing season (May to September). There was only one cloud-free SPOT-6 image, obtained on October 10, 2013. For the same reason, only three Landsat images were clear (May 5, 2013; Sep 9, 2013; Sep 29, 2013) in 2013. As well, we collected a Landsat 8 image on May 24, 2014.
A Gram-Schmidt Spectral Sharpening image fusion technique in ENVI 5.1 (ITT Exelis) was applied to produce pan-sharpened Landsat 7 or 8 multi-spectral images with a resolution of 15 m. This pan-sharpening method was selected because it preserves the original spectral information of the image and can be simultaneously applied to multispectral bands. The Landsat image pixel values (in digital numbers) were converted to top-of-atmosphere (TOA) spectral radiance, which was further converted to land surface reflectance using the Fast Line-of-sight Atmospheric Analysis of Hypercubes (FLAASH) atmospheric correction model with the atmospheric visibility parameter estimated from the MODIS aerosol product.
MODIS 16-day 250 m NDVI images and the 500 m LAI products from Jan 1 to Dec 31, 2013 were downloaded. Because a maximum value filtering method was used, NDVI and LAI products had significantly fewer cloud cover problems. NDVI data were used to determine the phenology of the boreal forest, including birch, larch and understory, which allow interpolation of Landsat images ranging from clear to contaminated days. MODIS LAI products were utilized to determine the leaf area of each tree. Despite its low resolution, it is the only continuous global leaf area product, but with acceptable accuracy (Ahl et al. 2006).
MODIS Bidirectional Reflectance Factor (BRF) products in May of 2013 were collected for validation. The BRF curves were reconstructed from the kernel coefficients using the Algorithm for Model Bidirectional Reflectance Anisotropies of the Land Surface (AMBRALS) (Wanner et al. 1995; Huang et al. 2013b; Sharma et al. 2013).
RAPID model
RAPID is a 3D radiative transfer model, able to simulate reflectance images over complex 3D natural scenes at large scales (30 to 1000 m) with great efficiency (Huang et al. 2013a), implying that RAPID can simulate images at MODIS pixel scales (250 to 1000 m). The main input parameters of RAPID consist of 3D structures of the ground, trees, buildings and rivers, as well as reflectance and transmittance of leaves, branches, walls, water bodies and roads under a few sun and sensor angles. The main outputs are BRF curves and land surface reflectance images with defined spatial resolution (default 0.5 m).
Simulation framework
Figure 4 shows the 3D simulation framework, with integrated parameters extracted from lidar data, field plots data, Landsat images and MODIS images managed into the RAPID model to simulate optical images of a virtual sensor with several view angles, 18 spectral bands and a half-meter spatial resolution.

Simulation framework to generate time series of optical images
The sensor is an advanced version of the Compact High Resolution Imaging Spectrometer (CHRIS/PROBA). CHRIS is the only multi-angular sensor launched with both high spatial (17 m) and spectral resolution (20–40 nm) (Rautiainen et al. 2008; García Millán et al. 2014). For any selected target, five images with different viewing angles (−55°, −36°, 0°, 36° and 55°) were made within a short span of 2.5 min. The virtual sensor was placed above the canopy under clear sky conditions.
A large number of input parameters needed to be set in order to simulate seasonal variation. A few parameters, such as LAI and soil moisture, vary considerably over the growing season, while other parameters remain relatively stable. Given our relatively limited data source, we defined five basic assumptions to reduce the number of unknowns:
-
1)
The DTM (digital terrain model) remained unchanged, a reasonable assumption for forested areas;
-
2)
Tree crowns were ellipsoid or cone shaped, similar with geometric optic models (Schaaf and Strahlerl 1994; Chen et al. 2012);
-
3)
Individual tree LAI (LAItree) was predicted from tree height (Xiao et al. 2006);
-
4)
We accepted a spherical leaf angle distribution (LADtree) for all trees due to missing measurements;
-
5)
Reflectance of non-vegetation objects, such as walls, water bodies and roads remained constant, following precedents set in existing literature (Wang et al. 2008) or in the ENVI spectral library.
With these assumptions, there were two types of input parameters: fixed or dynamic. Fixed parameters were DEM, land cover map, individual tree map (coordinates, DBH, height, crown radius, crown length). DEM and land cover map were re-sampled to a resolution of 1 m. Land cover maps were generated using a decision tree method with six classes: bare soil, road, birch forest, larch forest, water surface and buildings. Decision rules were largely based on the Ratio Vegetation Index (RVI), the Normalized Difference Water Index (NDWI) and CHM. Dynamic parameters determined the seasonal change of reflectance, such as component reflectances, LAI and sun position, obtained mainly from time series of MODIS products, including NDVI, LAI and land surface temperature (LST).
Leaf reflectance
Leaf reflectance and transmittance were measured only once, which was not sufficient to represent optical features for the entire growing season. Thanks to the PROSPECT model and changing the most sensitive input (leaf chlorophyll content) while fixing others, seasonal leaf reflectance and transmittance could be simulated (Barry et al. 2009). Previous studies have shown that the amount of leaf chlorophyll is correlated with NDVI (Wu et al. 2008; Rulinda et al. 2011; Croft et al. 2013; Feng and Niu 2014). Therefore, we used a linear relationship between MODIS NDVI products (0.1 to 1.0) and the amount of leaf chlorophyll (10 to 100 μg∙cm−2).
Background reflectance
Seasonal variation in background reflectance was complex. However, soil moisture played a major role (Muller and Décamps 2001; Weidong et al. 2002; Whiting et al. 2004), which was then derived from TVDI (temperature vegetation dryness index) inferred from temperature and NDVI (Sandholt et al. 2002; Liang et al. 2014). TVDI is highly correlated with soil moisture (Holzman et al. 2014). Therefore, we estimated the soil reflectance as the weighted average of dry soil and wet soil reflectance, where the weights were TVDI and (1-TVDI) respectively. The background was defined as soil covered by a homogeneous shrub layer with a LAI of 0.5. Shrub leaves were assumed to have the same optical parameters as birch leaves.
Growing season
From the Landsat classification map, pure birch and larch pixels were selected to determine the beginning and final day (DOY) of the annual growing season, using the following phenology analysis.
First, MODIS time series NDVI data were fitted using a harmonic analysis (Jonsson and Eklundh 2004) to remove random noises. We referred to the maximum and minimum values of NDVI as NDVImax and NDVImin. The starting date was defined as the DOY when NDVI exceeded 20 % of (NDVImax – NDVImin) between DOY 1 and DOY 180. Similarly, the final date was the DOY when NDVI exceeded 20 % of (NDVImax – NDVImin) between DOY 180 and DOY 365.
Temporal leaf area index of individual trees
It was difficult to calculate LAItree precisely. Instead, it was possible to allocate the MODIS LAI into individual trees. Based on assumption (3), LAItree is linearly related to tree height (H tree) for each species. Therefore, LAItree is a function of both species and DOY (see Equation 1).
where f is a coefficient relating H tree to LAItree, which is constant for each species and g is a temporal correction factor. Plot LAI and individual tree height in field plots were used to calibrate f values for both birch or larch:
For birch trees, we calibrated f as 0.25 and 0.20 for larch. From previous studies (Li et al. 2009; Liu and Jin 2013), we determined that the LAI of birch and larch varied with DOY and could be fitted with a polynomial equation. Both species showed very similar phenology in the spring without a difference on the average (Delbart et al. 2005), so we used the MODIS LAI to calibrate the g value for both species:
Evaluation method
Since the TreeVaW (Popescu and Wynne 2004) had not been tested in our study site, we manually segmented a few tree crowns in nine sub-plots with different tree densities in order to evaluate the accuracy of the extracted number of trees, height, location and crown radius.
We carried out four types of evaluations: (a) CCD image was used to check the pattern of simulated half-meter images; (b) Landsat images were used to check reflectance values of nadir images at the same date; (c) MODIS BRF products were used to compare simulated BRFs and (d) finally, we used four dates of Landsat images to evaluate temporal simulations.
Results
Tree structure
Compared to manual segmentation, TreeVaW detected 88 % of the number of trees in sparse plots (Fig. 5a, b), but only 74 % in dense plots (Fig. 5c, d). Crown radii obtained from TreeVaW ranged from 0.59 to 0.71 m, lower than those from manual segmentation. The mean tree height error and location bias of detected trees was 0.88 and 0.91 m.

Comparisons of tree segmentation between manual operation and TreeVaW in a sparse subplot (a-b) and a dense subplot (c-d); (a) and (c) are manual results; (b) and (d) are TreeVaW results
Based on regression analysis of plot data, both tree DBH and crown length (L) were well predicted from tree height (H) with coefficients of determination larger than 0.80:
Growing season
Figure 6 shows the smoothed NDVI curves for birch and larch-dominated forests. The starting date, final date and length of the growing season were estimated as DOY 140 (May 20), 273 (Sep 3) and 130 days. During the growing season, the birch forest had higher NDVI values than larch forests, and the larch forests in the flat wetland area had significant lower NDVI values than those in mountain areas.

Smoothed MODIS 16-day 250 m NDVI products in 2013
Land cover classification
The Landsat 8 image on May 24, 2014 was used to produce a 15 m classification map, given a suitable growing season and good image quality to distinguish birch and larch (Fig. 7a). Compared to the old forest map (Fig. 7b), the southern regions (1 and 2) visually matched much better than the northern regions (3 and 4). Fortunately, the major study area was located in regions 1 and 2, where the accuracy (around 75 %) was calculated from random sampling points. Major rules of the decision tree were the following: (1) forest vegetations = (RVI > 0 and NDWI > 0 and CHM > 2 m); (2) shrubs or grasses = (RVI > 0 and NDWI > 0 and CHM ≤ 2 m); (3) birch = ((1) and RVI > 7.0); (4) larch = ((1) and RVI ≤ 5.0); (5) mixed forests = ((1) and RVI > 5.0 and RVI ≤ 7.0).

Vegetation map: (a) classified image with the lightest greenness representing birch forests; (b) forest map with white color representing birch forests
Forest understory in the Genhe Reserve was complex but of considerable value in identifying forest types (see Table 1). Some shrubs were evergreen, while grasses shed leaves. Therefore, the vegetation detected in SPOT-6 image (1 m, October) was used to define shrubs as evergreen vegetation because only evergreens had green leaves at that time of the year (Fig. 8).

Determining vegetation as evergreen bush in winter season: (a) evergreen understory on Spot-6 image (red color); (b) CCD image; (c) CHM image
Comparisons of nadir images
Simulated nadir images (0.5 m resolution) were compared to the CCD image in Fig. 9. The spatial texture and land cover difference are consistent, but the simulated forests look sparser.

Comparing nadir image (0.5 m) with CCD: (a) simulated image (R = Near infrared (NIR), G = red, B = green); (b) airborne CCD mosaic image from multiple days
The spectral results were compared with Landsat 8 reflectance images on May 24, 2014 (Fig. 10). Both simulation and Landsat images showed typical vegetation reflectance spectra (low red reflectance and high near infrared (NIR) reflectance). Simulation results are significantly lower in blue bands (0.02 to 0.06).

Comparison of nadir top of canopy (TOC) reflectance image with a Landsat 8 image using linear stretch (0 to 0.3): (a) simulated image (0.5 m, R = NIR, G = red, B = green); (b) re-sampled 15 m image from (a); (c) Landsat 8 (15 m) on May 24, 2014 (R = NIR, G = red, B = green); (d) Spectral curves of dense and sparse canopies
Comparisons of BRF
Five pixels around the central study area showed variation in the BRF curves, used as a reference to evaluate the RAPID BRF results (Fig. 11). Generally, the simulated BRF matches the shape of MODIS BRF in spite of absolute biases in a few view directions. First, the simulated red BRF is higher than all MODIS BRFs when the view zenith angle (VZA) is between −50° and 40°. Second, in both red and NIR bands, the backscattering BRF when VZA larger than 50°, is lower than the MODIS BRF.

Comparisons between MODIS BRF product and RAPID simulations: (a) red band (0.620–0.670 nm); (b) NIR band (0.841–0.876 nm)
Temporal results
Four Landsat images were used to check the simulation ability of temporal variations; the dynamic parameters of birch and larch trees are shown in Table 2.
Figure 12 compares the results between simulated and real images in stripes of birch and larch forest stands (600 m by 600 m). The resolutions were 15 m except for the Landsat TM image (30 m) on September 5, 2013. The birch bands (marked as A) showed significant variation in reflectance from brown color (bare soil), red color (green canopy), pink color (dense canopy) to mixed color (discoloring canopy), reconstructed from simulated images in spite of slightly different colors. In the lower part of the Landsat ETM+ image, a black no-data area showed up, due to a sensor error (SLC-OFF). The results on Sept 5, 2013 showed larger discrepancies.

Comparison between simulated and Landsat images with false color composition (RGB = [NIR, RED, GREEN]); A and B represent birch and larch trees, respectively
Discussion
Our main objective was to create and test how to couple lidar data and temporal optical data MODIS in order to simulate high-resolution optical satellite images. A framework was built and tested at the Genhe Forest Farm. In spite of some biases or errors, the approach successfully produced temporal images with high spatial, spectral and angular resolutions, which confirmed the possibility to fuse lidar and MODIS data.
Major contributors on simulation
The framework included four main data sources: lidar, Landsat, MODIS and field data. To drive a 3D model, the most important inputs were 3D scenes and the inside reflectance and transmittance of 3D objects. Lidar was the first contributor to providing 3D structures of individual trees and background. Lidar-derived 3D structures were normally static, but 3D scenic objects, especially their LAI, were dynamic. Therefore, we used an allocation method to downscale MODIS LAI into each tree, a technique not found in previous studies. Landsat images were used to classify birch and larch, supporting the generation of 3D trees.
The optical parameters of 3D objects were collected in the field or obtained from existing references; these were also dynamic. Therefore, MODIS NDVI data were used to calibrate leaf chlorophyll for the PROSPECT model, which then simulated dynamic leaf reflectance and transmittance. Background soil reflectance varied over time and was difficult to obtain. An alternative is to use TVDI to adjust soil reflectance, which is a more recent idea and needs to be evaluated in any future research.
Major errors
Despite the fact that three types of evaluation on reflectance, i.e., spatial texture, BRF and Landsat simulation demonstrated the capability to simulate temporal images, quantitative validation was still missing due to lots of uncertainties in the entire workflow. We tried to address major error sources and assess their uncertainty:
-
1)
3D structure errors:
It has to be admitted that suppressed trees and irregular tree crowns are hard to detect from CHM. A previous study has shown that TreeVaW method can identify more than 95 % of the trees in planted forests but only 70 % in natural forests (Antonarakis et al. 2008). Although other detection algorithms may help improve the accuracy, the inter-comparisons between detection methods found that the correct percentage of the number of trees was generally between 50 to 90 % (Kaartinen et al. 2012). In our study, the percentage of the correct number was between 74 to 90 %, which is consistent with results above. The high level of missed detection leads to a higher clumping effect and sparser forests (Figs. 7 and 8), which then resulted in higher reflectance biases induced by background uncertainties.
-
2)
Unknown background:
Although we classified evergreen bush, its background type and dynamic reflectance were almost unknown. Therefore, a very rude LAI of 0.5 was assumed for all understories. In fact, it is possible to retrieve forest background reflectance from satellite data (Canisius and Chen 2007; Pisek and Chen 2009; Pisek et al. 2010; Tuanmu et al. 2010; Rautiainen et al. 2011; Pisek et al. 2012). We will try these methods to inverse background reflectance in later studies. We were able to validate the TVDI-adjusted soil reflectance, although it should have directional effects. Actually, we used isotropic soil reflectance, which may explain the BRF biases with large angles in backward view directions.
-
3)
Leaf discoloring
In September, the leaves of both birch and larch changed color. However, these changes varied even for trees of the same species, probably an effect of age, elevation or density, making it difficult to identify individual trees. Therefore, the accuracy in discoloration during the growing season will be low. Continuous field observations are strongly suggested.
-
4)
MODIS data uncertainty
The most recent MODIS LAI product is Collection 5 (this a version code), which has uncertainties around +/−1.0 for relatively pure pixels (Fang et al. 2012). However, considering the low resolution of MODIS pixels, the uncertainties of inversed LAIs are even larger for mixed pixels. The image matching between MODIS (1 km) and CHM (0.5 m) sounds tricky. However, as the only available product, it was used in our simulation framework. In any future study, we will use Landsat images to bridge the gap of higher resolution of LAI products (Gao et al. 2014). The BRF biases between simulation and MODIS can be partially attributed to the limitations of MODIS BRF in reconstructing higher and narrower hotspots (Huang et al. 2013b).
-
5)
Landsat data uncertainty
Landsat images were used to compare simulated nadir reflectance and image textures. Figure 10 shows significant differences in the blue band, which can be largely explained by an atmospheric correction error because blue band reflectance should be lower after a correct removal of aerosol scatter. This atmospheric correction was carried out by using the FLAASH module of the ENVI 5.1 software, where the aerosol optical depth and water content were only estimated from images.
Efficiency problems
RAPID is relatively fast with 3D models, but running one case (1 km) still needs four to six hours at individual tree scale on a workstation (using 10 CPU cores). We are of the opinion that it is not feasible for the generation of operational products. However, for some scientific use, focused on local areas, it may be worthwhile to obtain images with very high resolutions (spatial, spectral and angular) for research within an acceptable time frame and cost structure. Because RAPID can run at scalable resolutions, 3D scenes of dense forests can be up-scaled to regular grids with a medium resolution (e.g. 5 to 10 m), which significantly improves calculation efficiency (less than 30 min) without much loss in accuracy. Furthermore, we can create a reference table of 3D scenes, classifying a study area into fewer categories with possible combinations of DEM, understory, tree locations, tree heights and tree LAI. The corresponding reflectance images will be simulated and stored as an image database. Once the database is created, a quick search method can be used to pick up desired images based on input parameters such as DEM, understory, tree distribution and LAI. In the current framework, we only dealt with the capability of coupling simulation. Improvements will be presented in our next study.
Scale issues
Scale effect and scaling have been big issues in remote sensing community. When models or algorithms at small scales are used at large scales, they may produce certain errors, especially for non-linear models (Tao et al. 2009). Scale issues constrain the accuracy of retrieval and limit the development of remote sensing applications. In this study, MODIS LAI products at a 1 km scale were down-scaled to the level of LAI of individual trees, using lidar at a scale of only a few meters, used to coincide with the RAPID model scale. Assuming that MODIS LAI products are scale-corrected, this scaling does not change total leaf area. Since LAItree was found to be correlated with tree height, the down-scaling model should also be linear without model scale issues. In comparison with satellite images, the simulated RAPID images should also be re-sampled to coincide with the satellite scale, including the MODIS and Landsat scales. Fortunately, reflectance or radiance images are scale independent.
Using MODIS and lidar data to reconstruct 3D scenes at an individual tree scale, the RAPID model is capable of simulating time series of images at spatial scales from 0.5 m to 1 km and temporal scales of a few days. Although the 3D scene estimation is not perfect, this type of multi-scale optical image dataset will be useful to support the understanding of scale problems.
Conclusions
We presented a simulation framework which links lidar with optical images to produce series of temporal images. The study provides a proof-of-concept approach to link lidar data in the parameterization of a RAPID model for temporal image reconstruction in forest dominated areas. Demonstrations were applied at the Genhe Forest Farm, a remote forest reserve in China. Evaluations on nadir reflectance, spatial textures and BRF confirmed that 3D simulation provides an insight look into how images vary over time. Many uncertainties were identified, which can be expected to be reduced in any future study. Strategies to improve efficiency are possible and discussed.
References
Adams T, Beets P, Parrish C (2012) Extracting more data from LiDAR in forested areas by analyzing waveform shape. Remote Sens 4(3):682–702. doi:10.3390/rs4030682
Ahl DE, Gower ST, Burrows SN, Shabanov NV, Myneni RB, Knyazikhin Y (2006) Monitoring spring canopy phenology of a deciduous broadleaf forest using MODIS. Remote Sens Environ 104(1):88–95. doi:10.1016/j.rse.2006.05.003
Antonarakis AS, Richards KS, Brasington J, Bithell M, Muller E (2008) Retrieval of vegetative fluid resistance terms for rigid stems using airborne lidar. J Geophys Res 113(G2):G02S07. doi:10.1029/2007JG000543
Arno J, Escola A, Valles JM, Llorens J, Sanz R, Masip J, Palacin J, Rosell-Polo JR (2013) Leaf area index estimation in vineyards using a ground-based LiDAR scanner. Precision Agric 14(3):290–306. doi:10.1007/s11119-012-9295-0
Barbier N, Proisy C, Vega C, Sabatier D, Couteron P (2011) Bidirectional texture function of high resolution optical images of tropical forest: An approach using LiDAR hillshade simulations. Remote Sens Environ 115(1):167–179. doi:10.1016/j.rse.2010.08.015
Barry KM, Newnham GJ, Stone C (2009) Estimation of chlorophyll content in Eucalyptus globulus foliage with the leaf reflectance model PROSPECT. Agr Forest Meteorol 149(6–7):1209–1213, http://dx.doi.org/10.1016/j.agrformet.2009.01.005
Canisius F, Chen JM (2007) Retrieving forest background reflectance in a boreal region from Multi-anglo Imaging SpectroRadiometer (MISR) data. Remote Sens Environ 107(1–2):312–321. doi:10.1016/j.rse.2006.07.023
Chen G, Wulder MA, White JC, Hilker T, Coops NC (2012) Lidar calibration and validation for geometric-optical modeling with Landsat imagery. Remote Sens Environ 124(0):384–393, http://dx.doi.org/10.1016/j.rse.2012.05.026
Croft H, Chen JM, Zhang Y, Simic A (2013) Modelling leaf chlorophyll content in broadleaf and needle leaf canopies from ground, CASI, Landsat TM 5 and MERIS reflectance data. Remote Sens Environ 133(0):128–140, http://dx.doi.org/10.1016/j.rse.2013.02.006
Delbart N, Kergoat L, Le Toan T, Lhermitte J, Picard G (2005) Determination of phenological dates in boreal regions using normalized difference water index. Remote Sens Environ 97(1):26–38. doi:10.1016/j.rse.2005.03.011
Fang H, Wei S, Liang S (2012) Validation of MODIS and CYCLOPES LAI products using global field measurement data. Remote Sens Environ 119:43–54. doi:10.1016/j.rse.2011.12.006
Feng M, Niu Z (2014) Chlorophyll content retrieve of vegetation using Hyperion data based on empirical models. Remote Sens Land Resour 26(1):71–77. doi:10.6046/gtzyyg.2014.01.13
Gao F, Anderson MC, Kustas WP, Houborg R (2014) Retrieving leaf area index from landsat using MODIS LAI products and field measurements. IEEE Geosci Remote Sens Lett 11(4):773–777. doi:10.1109/lgrs.2013.2278782
Gao F, Masek J, Schwaller M, Hall F (2006) On the blending of the Landsat and MODIS surface reflectance: predicting daily Landsat surface reflectance. IEEE Trans Geosci Remote Sens 44(8):2207–2218. doi:10.1109/tgrs.2006.872081
García Millán VE, Sánchez-Azofeifa A, Málvarez García GC, Rivard B (2014) Quantifying tropical dry forest succession in the Americas using CHRIS/PROBA. Remote Sens Environ 144(0):120–136, http://dx.doi.org/10.1016/j.rse.2014.01.010
Hilker T, Wulder MA, Coops NC, Seitz N, White JC, Gao F, Masek JG, Stenhouse G (2009) Generation of dense time series synthetic Landsat data through data blending with MODIS using a spatial and temporal adaptive reflectance fusion model. Remote Sens Environ 113(9):1988–1999. doi:10.1016/j.rse.2009.05.011
Holzman ME, Rivas R, Bayala M (2014) Subsurface soil moisture estimation by VI-LST method. IEEE Geosci Remote Sens Lett 11(11):1951–1955. doi:10.1109/lgrs.2014.2314617
Huang H, Qin W, Liu Q (2013a) RAPID: a radiosity applicable to porous individual objects for directional reflectance over complex vegetated scenes. Remote Sens Environ 132:221–237. doi:10.1016/j.rse.2013.01.013
Huang X, Jiao Z, Dong Y, Zhang H, Li X (2013b) Analysis of BRDF and albedo retrieved by kernel-driven models using field measurements. IEEE J Selected Topics Appl Earth Observ Remote Sens 6(1):149–161. doi:10.1109/jstars.2012.2208264
Inglada J, Hagolle O, Dedieu G (2011) A framework for the simulation of high temporal resolution image series. Paper presented at the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 24–29 July 2011
Jacquemoud S, Verhoef W, Baret F, Bacour C, Zarco-Tejada PJ, Asner GP, François C, Ustin SL (2009) PROSPECT + SAIL models: a review of use for vegetation characterization. Remote Sens Environ 113(Supplement 1 (0)):S56–S66, http://dx.doi.org/10.1016/j.rse.2008.01.026
Jonsson P, Eklundh L (2004) TIMESAT - a program for analyzing time-series of satellite sensor data. Comput Geosci 30(8):833–845. doi:10.1016/j.cageo.2004.05.006
Kaartinen H, Hyyppä J, Yu X, Vastaranta M, Hyyppä H, Kukko A, Holopainen M, Heipke C, Hirschmugl M, Morsdorf F, Næsset E, Pitkänen J, Popescu S, Solberg S, Wolf BM, Wu J-C (2012) An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sensing 4(4):950–974
Kobayashi H, Suzuki R, Kobayashi S (2007) Reflectance seasonality and its relation to the canopy leaf area index in an eastern Siberian larch forest: Multi-satellite data and radiative transfer analyses. Remote Sens Environ 106(2):238–252. doi:10.1016/j.rse.2006.08.011
Li GZ, Wang HX, Zhu JJ (2009) Monthly changes of leaf area index and canopy openness of Larix olgensis in mountainous regions in east Liaoning province. J Northeast Forestry Univ 37(7):13
Liang L, Zhao S-h, Qin Z-h, He K-x, Chen C, Luo Y-x, Zhou X-d (2014) Drought change trend using MODIS TVDI and its relationship with climate factors in china from 2001 to 2010. J Integr Agric 13(7):1501–1508, http://dx.doi.org/10.1016/S2095-3119(14)60813-3
Liu ZL, Jin GZ (2013) Estimation of leaf area index of secondary Betula platyphylla forest in Xiaoxing' an Mountains. Acta Ecologica Sinica 33(8):9
Lucas RM, Lee AC, Williams ML (2006) Enhanced simulation of radar backscatter from forests using LiDAR and optical data. IEEE Trans Geosci Remote Sens 44(10):2736–2754. doi:10.1109/tgrs.2006.881802
Lunetta RS, Johnson DM, Lyon JG, Crotwell J (2004) Impacts of imagery temporal frequency on land-cover change detection monitoring. Remote Sens Environ 89(4):444–454. doi:10.1016/j.rse.2003.10.022
Masek JG, Huang C, Wolfe R, Cohen W, Hall F, Kutler J, Nelson P (2008) North American forest disturbance mapped from a decadal Landsat record. Remote Sens Environ 112(6):2914–2926. doi:10.1016/j.rse.2008.02.010
Montesano P, Cook B, Sun G, Simard M, Nelson R, Ranson K, Zhang Z, Luthcke S (2013) Achieving accuracy requirements for forest biomass mapping: a spaceborne data fusion method for estimating forest biomass and LiDAR sampling error. Remote Sens Environ 130:153–170. doi:10.1016/j.rse.2012.11.016
Mu X, Zhang Q, Liu Q, Pang Y, Hu K (2015) A study on typical forest biomass mapping technology of great khingan using airborne laser scanner data. Remote Sens Technol Appl 30(2):220–225
Muller E, Décamps H (2001) Modeling soil moisture–reflectance. Remote Sens Environ 76(2):173–180, http://dx.doi.org/10.1016/S0034-4257(00)00198-X
Nitze I, Barrett B, Cawkwell F (2015) Temporal optimisation of image acquisition for land cover classification with Random Forest and MODIS time-series. Int J Appl Earth Observ Geoinformation 34:136–146. doi:10.1016/j.jag.2014.08.001
Pisek J, Chen JM (2009) Mapping forest background reflectivity over North America with Multi-angle Imaging SpectroRadiometer (MISR) data. Remote Sens Environ 113(11):2412–2423. doi:10.1016/j.rse.2009.07.003
Pisek J, Chen JM, Miller JR, Freemantle JR, Peltoniemi JI, Simic A (2010) Mapping forest background reflectance in a boreal region using multiangle compact airborne spectrographic imager data. IEEE Trans Geosci Remote Sens 48(1):499–510. doi:10.1109/tgrs.2009.2024756
Pisek J, Rautiainen M, Heiskanen J, Mottus M (2012) Retrieval of seasonal dynamics of forest understory reflectance in a Northern European boreal forest from MOD'S BRDF data. Remote Sens Environ 117:464–468. doi:10.1016/j.rse.2011.09.012
Popescu SC, Wynne RH (2004) Seeing the trees in the forest: using lidar and multispectral data fusion with local filtering and variable window size for estimating tree height. Photogrammetric Eng Remote Sens 70(5):589–604
Rautiainen M, Lang M, Mõttus M, Kuusk A, Nilson T, Kuusk J, Lükk T (2008) Multi-angular reflectance properties of a hemiboreal forest: An analysis using CHRIS PROBA data. Remote Sens Environ 112(5):2627–2642, http://dx.doi.org/10.1016/j.rse.2007.12.005
Rautiainen M, Mottus M, Heiskanen J, Akujarvi A, Majasalmi T, Stenberg P (2011) Seasonal reflectance dynamics of common understory types in a northern European boreal forest. Remote Sens Environ 115(12):3020–3028. doi:10.1016/j.rse.2011.06.005
Rulinda CM, Bijker W, Stein A (2011) The chlorophyll variability in Meteosat derived NDVI in a context of drought monitoring. Procedia Environ Sci 3(0):32–37, http://dx.doi.org/10.1016/j.proenv.2011.02.007
Sandholt I, Rasmussen K, Andersen J (2002) A simple interpretation of the surface temperature/vegetation index space for assessment of surface moisture status. Remote Sens Environ 79(2–3):213–224, http://dx.doi.org/10.1016/S0034-4257(01)00274-7
Schaaf CB, Strahlerl AH (1994) Validation of bidirectional and hemispherical reflectances from a geometric-optical model using ASAS imagery and pyranometer measurements of a spruce forest. Remote Sens Environ 49(2):138–144, http://dx.doi.org/10.1016/0034-4257(94)90050-7
Sharma RC, Kajiwara K, Honda Y (2013) Estimation of forest canopy structural parameters using kernel-driven bi-directional reflectance model based multi-angular vegetation indices. ISPRS J Photogrammetry Remote Sens 78:50–57. doi:10.1016/j.isprsjprs.2012.12.006
Tao X, Yan B, Wang K, Wu D, Fan W, Xu X, Liang S (2009) Scale transformation of Leaf Area Index product retrieved from multiresolution remotely sensed data: analysis and case studies. Int J Remote Sens 30(20):5383–5395. doi:10.1080/01431160903130978
Tuanmu M-N, Vina A, Bearer S, Xu W, Ouyang Z, Zhang H, Liu J (2010) Mapping understory vegetation using phenological characteristics derived from remotely sensed data. Remote Sens Environ 114(8):1833–1844. doi:10.1016/j.rse.2010.03.008
Wang JD, Zhang LX, Liu QH, Zhang B, Yin Q (2008) The spectrum knowledge database of typical land surface objects in China. Science Press, Beijing
Wanner W, Li X, Strahler AH (1995) On the derivation of kernels for kernel-driven models of bidirectional reflectance. J Geophys Res 100(D10):21077–21089. doi:10.1029/95JD02371
Weidong L, Baret F, Xingfa G, Qingxi T, Lanfen Z, Bing Z (2002) Relating soil surface moisture to reflectance. Remote Sens Environ 81(2–3):238–246, http://dx.doi.org/10.1016/S0034-4257(01)00347-9
Whiting ML, Li L, Ustin SL (2004) Predicting water content using Gaussian model on soil spectra. Remote Sens Environ 89(4):535–552, http://dx.doi.org/10.1016/j.rse.2003.11.009
Wu C, Niu Z, Tang Q, Huang W (2008) Estimating chlorophyll content from hyperspectral vegetation indices: Modeling and validation. Agr Forest Meteorol 148(8–9):1230–1241, http://dx.doi.org/10.1016/j.agrformet.2008.03.005
Wu M-Q, Wang J, Niu Z, Zhao Y-Q, Wang C-Y (2012) A model for spatial and temporal data fusion. J Infrared Millimeter Waves 31(1):80–84
Xiao C-W, Janssens IA, Curiel Yuste J, Ceulemans R (2006) Variation of specific leaf area and upscaling to leaf area index in mature Scots pine. Trees 20(3):304–310. doi:10.1007/s00468-005-0039-x
Xu G-c, Pang Y, Li Z-y, Zhao K-r, Liu L-x (2013) The changes of forest canopy spectral reflectance with seasons in Xiaoxing'anling. Spectrosc Spectral Anal 33(12):3303–3307
Acknowledgements
The authors gratefully acknowledge the Chinese National Basic Research Program (2013CB733401) and the Chinese Natural Science Foundation Project (41171278).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
HH is the major and contact author for most work. JL processed a small part of the data. Both authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Huang, H., Lian, J. A 3D approach to reconstruct continuous optical images using lidar and MODIS. For. Ecosyst. 2, 20 (2015). https://doi.org/10.1186/s40663-015-0044-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40663-015-0044-5