
Abstract
Soft robotics enables various applications in certain environments where conventional rigid robotics cannot deliver the same performance due to their form factor and stiffness. Animals use their soft external organs to carry out activities in response to challenging natural environments efficiently. The objective of soft robots is to provide biologically inspired abilities and enable adaptable and flexible interactions with complex objects and surroundings. Recent advances in stimuli-responsive soft robot technology have heavily used polymer-based multifunctional materials. Soft robots with incredibly sophisticated multi-mechanical, electrical, or optical capabilities have demonstrated the ability to modify their shape intelligently in response to external stimuli, such as light, electricity, thermal gradient, and magnetic fields. This short review covers recent advances in scientific techniques for incorporating multifunctional polymeric materials into stimuli-responsive bioinspired soft robots and their applications. We also discuss how biological inspiration and environmental effects can provide a viable viewpoint for bioinspired design in the innovative field of soft robotics. Lastly, we highlight the future outlooks and prospects for soft, stimuli-responsive, bio-inspired robots.
Similar content being viewed by others

Introduction
Bio-inspired soft robots meet or surpass the incredible adaptability and functioning of living organisms [1,2,3]. Soft robots consisting of yielding polymers are better equipped to mimic soft-bodied organisms than rigid robots because their rigid components restrict the adaptability and diversity of robots [4,5,6]. Soft robotic systems are also better suited for interacting with humans, especially for wearable operations [7,8,9]. Many researchers focus on stopping restricting soft robots from tethering to external or heavy onboard control systems by applying some environmental stimuli [10, 11]. These soft robots must integrate the ability to sense, actively move in harsh conditions, and manage their behavior to compete with rigid robots. These capabilities can be achieved by ingeniously combining biological and soft materials to create structures with global compliance and deformability [12, 13].
Micro-electro-mechanical systems (MEMS) and robotic devices have been developed using stimuli-responsive materials, transforming environmental stimuli into mechanical activity [14, 15]. Soft robots can be made from various materials, including metals, polymers, and inorganic and nonmetallic materials [16,17,18]. Much research has been done on polymer-based soft robots because of their flexibility or adaptability, resembling the mechanical behavior of biological cells or tissues. Recently-emerged stimulus-responsive polymers can dynamically alter their physicochemical characteristics in response to outside stimuli, including temperature, light, and electrical or magnetic field changes. Additionally, many stimuli-responsive polymers are non-toxic to biological environments, making soft polymeric robots appropriate for various biomedical uses, including flexible electronics and tissue engineering [19,20,21].
This short review aims to highlight current research on the advancement of bioinspired soft robots based on stimuli-responsive (for instance, light, magnetic field, and electricity) polymers with various shape-morphing functionality and configurable motion control features and also their conceptual design learned from biological systems. Finally, the constraints and prospects for better stimuli-responsive soft robots are discussed.
Stimuli-responsive polymeric soft robots
Light-driven soft robots
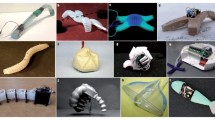
Recent years have seen a lot of research on using light to power robots [22,23,24]. An optomechanical liquid crystalline elastomer (LCE) monolith-based soft caterpillar robot powered by light was proposed by Rogóż et al. The robot could carry out various activities in challenging conditions and exhibit diverse gaits [25]. Yang et al. reported a unique soft robot with a snake-like design using polydopamine and triple-layer reduced graphene oxide. The developed robot utilized two snake-like mobility modes, concertina, and serpentine modes, corresponding to external near-infrared (NIR) light stimulation [26]. However, the majority of current light-driven robots exhibit constricted locomotion skills and restricted locomotion modalities Fig. 1.

Schematic representation of bioinspired designs, polymers, and applied external stimuli for soft robotics
A light-powered soft robot with a bioinspired design from an inchworm and fruit fly that could crawl on the ground, squeeze through narrow channels, and jump over obstacles was introduced by Ahn et al. [27]. The inchworm robot based on the LCE-CNT composite could crawl when exposed to periodic light irradiation by simulating the movement of a caterpillar. Uniaxially aligned mesogens in a monodomain LCE become disoriented as the temperature rises, causing a significant and reversible material contraction. Due to the photothermal effect of the incorporated CNTs, the LCE-CNT composite exhibited significant reversible activation when exposed to visible light. The edge of the film that was heavily exposed to light had the highest temperature, while the opposite side had the lowest temperature. The non-uniform temperature field of the film caused non-uniform contraction and deformation in bending, as shown in Fig. 2a1. To simulate a complicated environment, the author installed a variety of obstacles along the robot’s path, including a wall, a channel, and a stair. The robot, which could move at a speed of 0.7 mm/sec, scanned the lightbulb throughout its surface (0.5 body length min−1). The robot’s height reduces by 25% while crawling to pass through a narrow channel with the reproduction of the time intervals between two consecutive light scanning cycles. A power-amplifying device influenced by the jumping of fruit fly larva was developed to enable light-powered robot jumping. With light irradiation on its inner surface, the robot initially morphs into a closed loop. Due to the strong binding force of the two magnets, the closed loop can still be maintained even when the light is turned off, as shown in Fig. 2a2. This soft robot can jump up to 130 mm high, four times its height, as shown in Fig. 2a3. Those structures have the potential to be helpful shortly for micro- and nanorobotics, biomedical applications, environmental monitoring, and space exploration.

© 2022, Elsevier
Digital image of a1 crawling of inchworm designed an arch-shaped soft robot that can crawl and jump, powered by light. a2 jumping of the fruitfly, like a soft robot with two magnets attached to the ends (gray area) can also jump by forming a closed loop through magnetic force, storing elastic energy under light irradiation. a3 crawling in the forward direction, jumping over a wall showing the deformation significantly, second time jumping of the soft robot, Reprinted from (27), John Wiley and Sons (2019), b1 Representative photographs showing the structure of Geca-Robot inspired by gecko and caterpillar. b2 The muscle comprised cuboids of PDMS and graphene/PDMS (GP). b3 The gait of the Geca-Robot indicates the states of the front feet (left column) and rear feet (right column) during stand-by, light-on, and light-off periods (middle column). b4 the regulation of Geca-Robot movement by UV irradiation, a typical infrared image of Geca-Robot under UV irradiation at a different time during one pulse period, the white line showing the temperature profile across the entire Geca-Robot muscle along the direction of movement, Reprinted from (31), Copyright
With high levels of deformability, soft robots have the potential to carry out regular tasks as well as difficult industrial, medical, or military missions of robots with rigid equivalents [28,29,30]. Wang et al. developed a footed light-driven soft robot named Geca-Robot, mimicking the anisotropic friction of gecko setae and the gait of caterpillars and had good terrain adaptability and huge load-bearing capability illustrated in Fig. 2b1 [31]. The feet of the Geca-Robot, which are made of alternate cuboids of polydimethylsiloxane (PDMS) and graphene-PDMS for the muscle, consist of triangular micropillars inspired by geckos, as shown in Fig. 2b2. Geca-Robot was autonomously driven by light with wavelengths ranging from ultraviolet to infrared, and it moves in a caterpillar-like motion. When the light is turned on, the front feet progress and the rear feet perform the same action when the light is turned off. As a result, the light on–off cycle (also referred to as one plus) elevates the Geca-robot ahead using a caterpillar-like looping motion, as shown in Fig. 2b3. The Geca-muscle was driven by graphene, the light-responsive component that absorbs light across the full spectrum, as shown in Fig. 2b4. Geca-Robot could move about on surfaces with slopes as high as 30° and various degrees of roughness and dryness because of its gecko-inspired feet. Geca-Robot could operate extremely effectively within a large temperature range of 17–100 °C due to the drive mechanism, which was difficult to achieve in many existing soft robots. Geca-Robot could also lift 50 times its weight in freight. Since infrared light penetrates biological tissue well, it is especially appealing for in vivo medical applications that this energy source could power the Geca-Robot.
Magnetic field-driven soft robots
Magnetic field-driven soft robots with bio-inspired designs have shown great advances recently [32,33,34]. Niu et al. designed a soft worm-like robot named MagWorm with a biomimetic magnet implanted in a centimeter-level size. The MagWorm’s soft body consists of magnetic patches that work with an external moving drive-magnet system for actuation [35].
A soft robot with sensing and shape-deforming capabilities inspired by sea anemones was developed by Wang et al. The robot had one active core and four detecting tentacles [36]. It consisted of two parts: a bottom magneto-stimulated shrinkable hollow body and top magneto-electric sensors that resembled tentacles. The bottom body of tentacle sensors could be instructed to deform in accordance with the perception of the surrounding seawater velocity. The soft robot’s lower screwed cylindrical body had alternating N-S magnetic poles that allowed it to rapidly contract or expand in response to an external magnetic field (Fig. 3a1). The soft robot was carefully set on the stone layer below the water, and a high-resolution camera was mounted on the robot to take pictures of the robot’s bending tentacles at various angles, as shown in Fig. 3a2. The tentacles would instantaneously bend in the direction of the water flow with a delay of 42 ms, producing a distinctive output voltage signal of 6.9 μV when the water flow velocity was 1.9 m/s. It is anticipated that a design like this, including the integrated soft robot with sensing and shape-changing, would be more of an example for the smart development and application of soft robotics in the future for underwater and microfluidic applications.

© 2022, Elsevier, a3 The crawling process of the soft robot driven by cardiomyocytes. a4 The crawling process of a soft robot on a flat surface, on an incline of 10°, and an incline of 20°, Reprinted from 38, John Wiley and Sons (2022), b1 Cross-section view of inchworm-type soft robot, b2 sensor response during single magnet actuation, b3 Schematic of locomotion with single magnet actuation b4 Photographs of locomotion cycles with single magnet actuation, Reprinted from (39), CC BY 4.0 (2021)
a1 Schematic diagrams of the original state, the intermediate state, the final state, and the recovery state of the body during the deformation processes under the external magnetic stimuli, respectively. a2 Optical images of the soft robot sensing the change of water flow speed, Reprinted from (36), Copyright
Stimuli-responsive soft robots with biological components, such as intrinsic sensing, are essential to enable controlled movements, thus revolutionizing developments in soft robotics [37]. Sun et al. developed a unique magnetic-field-driven soft robot with asymmetric claws, a layer of cardiac tissue induced by CNTs, methacrylate gelatin (GelMA), and a structural color indicator [38]. The crawling motion of snakes and caterpillars served as inspiration. The asymmetric claws could help the entire soft robot move in a certain direction as the cardiomyocytes contract, as shown in Fig. 3a3, and the hydrogel substrate underwent deformation. The cardiomyocytes’ ability to beat and generate contractions was improved by controlling how they were positioned due to the oriented conductivity of the CNT layer. The soft robots were placed under a low magnetic field generated by a conventional magnet to ensure that the claws made contact with the substrate. The ability of these soft robots to navigate across the rough surface of films of colloidal crystals made of silica particles was demonstrated. The roughness of the substrate helped the soft robot to crawl with the support of friction, as shown in Fig. 3a4.
Similarly, Ecoflex and graphite paste-based sensor material were harmoniously integrated to develop inchworm-like and earthworm-like soft robots with internal strain sensing by Karipoth et al., as shown in Fig. 3b1 [39]. The ultra-stretchable tubular design of the strain sensor was further modified so that an external magnetic field could control it, actuating the earthworm-like soft robot. A set of tiny N42-grade NdFeB magnets on each end rendered the tubular structure’s two ends (the head and tail) magnetically active. The sensor response during the single magnetic actuation is shown in Fig. 3b2. Figure 3b3 shows the schematic representation of the soft robot’s locomotion with single magnet actuation. The fabricated robot demonstrated a record stretchability (900%), sensitivity (of 103 up to 200, and the order of 105 at about 700% linear strain), and controlled movement and simultaneous sensing abilities. Further, the digital photographs of the locomotion cycles of the soft robot are shown in Fig. 3b4. These findings show new opportunities for employing soft robots with intrinsic sensing in delicate surgical situations.
Electrical field-driven soft robots
Soft robotics-based biomedical applications are interested in engineered living-synthetic systems as soft robots can vigorously alter the structure and perceive biological environments [40]. Shin et al. designed a soft robotics system resembling a batoid fish that incorporates self-actuating heart muscles on a scaffold with a layer-by-layer organized framework of two hydrogel layers with tiny patterns constituting the substrate and a flexible gold microelectrode [41]. The actuation component was made up of two layers: a layer of gelatin GelMa hydrogels embedded with CNTs, which served as a cell culture substrate, and a layer of poly (ethylene glycol) hydrogel substrate, which worked as a mechanically sturdy platform, as shown in Fig. 4a1. Additionally, flexible Au microelectrodes were included in the biomimetic framework, improving both the mechanical integrity and electrical conductivity of the device. The Au microelectrodes positioned beneath the cell layer of the soft robotic system also provided the induced electrical stimulation and controlled beating actions, as shown in Fig. 4a2. While an AC external electrical field at 1 Vcm−1 was provided with frequencies ranging from 0.5 to 2.0 Hz, the bioinspired soft robot responded by beating, as shown in Fig. 4a3. Cardiomyocytes exhibited good myofiber organization and offered self-actuating motions aligned with the direction of the contractile force of the cells after being cultured and matured on the biomimetic scaffold shown in Fig. 4a2. Additionally, this work offers possible advantages in regenerative medicine, such as electrical stimulator-integrated cardiac or muscular patches for tissue regeneration.

a1 Schematic illustration of the contraction behavior of the cultured cardiac muscle tissue on the bioinspired scaffold. The cultured cardiac muscle tissue showed a pseudo-3D structure, which could be separated into four layers, the (i-1 and -2) upper, (ii) middle, and (iii) bottom, based on aligned and random cardiomyocyte morphology. a2 obtained bioinspired soft robot with embedded Au microelectrodes. Copper wires were connected to the structure using a silver paste to make electrical contact for local electrical stimulation. a3 the mechanism of longitudinal tail displacement, which induces the soft robot displacement along the vertical direction, mainly on the tail part, when the cells contract. a4 beating response of the bioinspired soft robot when stimulated with an electrical field. Reprinted from (41), John Wiley and Sons (2022), b1 Schematic diagram of TESR system, control module, and rotary freestanding triboelectric nanogenerator (RF-TENG), b2 Schematic of crawling process of TESR based on the locomotion principle of an inchworm. b3 Working principle of RF-TENG in one cycle. b4 The application demonstrations of TESR: crawling into a horizontal and on an inclined plane. Reprinted from (44), John Wiley and Sons (2022)
Finding a green energy supply is a major issue for electrically responsive soft robots because the required voltage exceeds several volts [30, 42, 43]. In this case, a workable modern technology called a triboelectric inchworm-inspired soft robot (TESR) system that primarily functions by a rotatory triboelectric nanogenerator was designed by Liu et al. as shown in Fig. 4b1 [44]. Two triboelectric adhesion feet were propelled and precisely regulated by the triboelectric effect, achieving the highest crawling speed of 14.9 mm s−1 on the top of the acrylic polymer, as shown in Fig. 4b2. To achieve the soft-deformable body, the dielectric elastomer was pre-stretched several times. The triboelectric nanogenerator (TENG) was used to analyze and mimic the TESR’s features, including displacement and force called RF-TENG. The working mechanism of the triboelectric nanogenerator for influencing the soft robot is shown in Fig. 4b3. Under the guidance of RF-TENG, TESR successfully crawled on various material surfaces and slopes with varying angles, as shown in Fig. 4b4. For real-time visual monitoring, in which TESR carried a tiny camera to send images through a long, narrow tunnel, it also raised the possibility that it could be used for clinical assessment in an unreachable area to humans. The digital photograph of the crawling process inside the tunnel and images were also recorded by the micro camera attached to the robot. This study adds to broadening the applicability of TENG by providing a clear perspective on the green energy harvesting technologies appropriate for electrically-driven soft robots.
Future perspectives
Future soft bioinspired robots should be able to adapt and evolve since they will be composed of recyclable, biodegradable, or biohybrid materials [45,46,47]. Soft robots will also utilize renewable energy sources without disrupting the energy balance of natural ecosystems. These soft green robots will be designed to follow a lifecycle and to integrate better into the natural ecosystem, ushering in a new generation of environmentally conscious technologies [48, 49]. To make the soft robot completely function in a harsh environment, the researchers must comprehensively understand the structure and characteristics of living animals in their surroundings [50, 51].
Smart, innovative materials are required to connect characteristics with these design goals of soft robots [52]. Due to the amorphous state of soft materials, there is still no standardized design in soft robotic design. Soft matter engineers would ideally be able to build on the earlier study using a library of well-specified materials and design structures rather than using assumptions of soft design concepts [53,54,55]. Soft robots have many uses, and new applications for various technology will be covered. This field can also examine real-world applications in the manufacturing, industrial, educational, and consumer sectors [56,57,58]. Additionally, applying reliable, widely accepted manufacturing methodologies with rising comparability of active materials is possible.
Finally, soft robots must be equipped with artificial intelligence (AI) for this subject to advance [59, 60]. Soft robots can utilize and benefit greatly from the typical algorithms of rigid robots, which can be implemented for future progress.
Summary
This short review presents an overview of current achievements in bio-inspired soft robots that are driven by external stimuli such as light, magnetic field, and electrical field in this short review. We concentrated on how biology can contribute to the advancement of soft robotics by replicating environmentally adaptive features. We have also addressed bio-inspired functionalities in soft robot applications but from a system level, such as transportation, mobility, handling, distortion, detection, and functioning as biomedical devices. The presented soft robots can address the need for a uniform material platform by converting local tension, light, magnetic, and electrical fields into more accurate signals. These methods can be broadly applied to infinite soft materials and composites, offering various building blocks for cutting-edge soft robots. The future development of smart soft materials may significantly impact the rapid development of diverse soft robotics.
Availability of data and materials
Data and material are available upon request to authors.
References
Manti M, Hassa T, Passetti G, D’Elia N, Laschi C, Cianchetti M (2015) A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robot 2:107–116
Kim S, Laschi C, Trimmer B (2013) Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol 31:287–294
Coyle S, Majidi C, LeDuc P, Hsia KJ (2018) Bio-inspired soft robotics: material selection, actuation, and design. Extreme Mech Lett 22:51–59
Xiao Y-Y, Jiang Z-C, Zhao Y (2020) Liquid crystal ppolymer-based soft robots. Adv Intell Syst 2:2000148
Schmitt F, Piccin O, Barbé L, Bayle B (2018) Soft robots manufacturing: a review. Front Robot AI 5:84
Terryn S, Langenbach J, Roels E, Brancart J, Bakkali-Hassani C, Poutrel Q-A, Georgopoulou A, Thuruthel TG, Safaei A, Ferrentino P (2021) A review on self-healing polymers for soft robotics. Mater Today 47:187–205
Polygerinos P, Correll N, Morin SA, Mosadegh B, Onal CD, Petersen K, Cianchetti M, Tolley MT, Shepherd RF (2017) Soft robotics: review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Adv Eng Mater 19:1700016
Arnold T, Scheutz M (2017) The tactile ethics of soft robotics: Designing wisely for human–robot interaction. Soft Rob 4:81–87
Shih B, Shah D, Li J, Thuruthel TG, Park Y-L, Iida F, Bao Z, Kramer-Bottiglio R, Tolley MT (2020) Electronic skins and machine learning for intelligent soft robots. Sci Robot 5:eaaz9239
Kim JG, Park JE, Won S, Jeon J, Wie JJ (2019) Contactless manipulation of soft robots. Materials 12:3065
Shen Z, Chen F, Zhu X, Yong K-T, Gu G (2020) Stimuli-responsive functional materials for soft robotics. J Mater Chem B 8:8972–8991
Appiah C, Arndt C, Siemsen K, Heitmann A, Staubitz A, Selhuber-Unkel C (2019) Living materials herald a new era in soft robotics. Adv Mater 31:1807747
Mestre R, Patiño T, Sánchez S (2021) Biohybrid robotics: from the nanoscale to the macroscale. Wiley Interdiscip Rev Nanomed Nanobiotechnol 13:e1703
Oh D, Seo J, Kim HG, Ryu C, Bang S-W, Park S, Kim HJ (2022) Multi-height micropyramids based pressure sensor with tunable sensing properties for robotics and step tracking applications. Micro Nano Syst Lett 10:7
El-Atab N, Mishra RB, Al-Modaf F, Joharji L, Alsharif AA, Alamoudi H, Diaz M, Qaiser N, Hussain MM (2020) Soft actuators for soft robotic applications: a review. Adv Intell Syst 2:2000128
Elango N, Faudzi AAM (2015) A review article: investigations on soft materials for soft robot manipulations. Int J Adv Manuf Technol 80:1027–1037
Koshima H (2019) Mechanically responsive materials for soft robotics. Wiley-VCH, Weinheim
Kim Y, Zhao X (2022) Magnetic soft materials and robots. Chem Rev 122:5317–5364
Hartmann F, Baumgartner M, Kaltenbrunner M (2021) Becoming sustainable, the new frontier in soft robotics. Adv Mater 33:2004413
Lee Y, Song W, Sun J-Y (2020) Hydrogel soft robotics. Mater Today Phys 15:100258
Panda S, Hajra S, Mistewicz K, Nowacki B, In-na P, Krushynska A, Mishra YK, Kim HJ (2022) A focused review on three-dimensional bioprinting technology for artificial organ fabrication. Biomater Sci. https://doi.org/10.1039/D2BM00797E
Da Cunha MP, Debije MG, Schenning AP (2020) Bioinspired light-driven soft robots based on liquid crystal polymers. Chem Soc Rev 49:6568–6578
Huang C, Lv Ja, Tian X, Wang Y, Yu Y, Liu J (2015) Miniaturized swimming soft robot with complex movement actuated and controlled by remote light signals. Sci Rep 5:1–8
Song X, Qiu X, Huang X, Xu M, Zhang L (2022) Light-driven awn-footed soft robots. Macromol Mater Eng 307:2101003
Rogóż M, Zeng H, Xuan C, Wiersma DS, Wasylczyk P (2016) Light-driven soft robot mimics caterpillar locomotion in natural scale. Adv Opt Mater 4:1689–1694
Yang Y, Zhang M, Li D, Shen Y (2019) Graphene-based light-driven soft robot with snake-inspired concertina and serpentine locomotion. Adv Mater Technol 4:1800366
Ahn C, Liang X, Cai S (2019) Bioinspired design of light-powered crawling, squeezing, and jumping untethered soft robot. Adv Mater Technol 4:1900185
Cianchetti M, Laschi C, Menciassi A, Dario P (2018) Biomedical applications of soft robotics. Nat Rev Mater 3:143–153
Whitesides GM (2018) Soft robotics. Angew Chem Int Ed 57:4258–4273
Rus D, Tolley MT (2015) Design, fabrication and control of soft robots. Nature 521:467–475
Wang X, Yang B, Tan D, Li Q, Song B, Wu Z-S, del Campo A, Kappl M, Wang Z, Gorb SN, Liu S, Xue L (2020) Bioinspired footed soft robot with unidirectional all-terrain mobility. Mater Today 35:42–49
Ebrahimi N, Bi C, Cappelleri DJ, Ciuti G, Conn AT, Faivre D, Habibi N, Hošovský A, Iacovacci V, Khalil ISM, Magdanz V, Misra S, Pawashe C, Rashidifar R, Soto-Rodriguez PED, Fekete Z, Jafari A (2021) Magnetic actuation methods in bio/soft robotics. Adv Func Mater 31:2005137
Chung HJ, Parsons AM, Zheng L (2021) Magnetically controlled soft robotics utilizing elastomers and gels in actuation: a review. Adv Intell Syst 3:2000186
Wang H, Zhu Z, Jin H, Wei R, Bi L, Zhang W (2022) Magnetic soft robots: design, actuation, and function. J Alloys Comp. https://doi.org/10.1016/j.jallcom.2022.166219
Niu H, Feng R, Xie Y, Jiang B, Sheng Y, Yu Y, Baoyin H, Zeng X (2021) MagWorm: a biomimetic magnet embedded worm-like soft robot. Soft Robot 8:507–518
Wang Q, Wu Z, Huang J, Du Z, Yue Y, Chen D, Li D, Su B (2021) Integration of sensing and shape-deforming capabilities for a bioinspired soft robot. Compos B Eng 223:109116
Li M, Ostrovsky-Snider NA, Sitti M, Omenetto FG (2019) Cutting the cord: progress in untethered soft robotics and actuators. MRS Adv 4:2787–2804
Sun L, Chen Z, Bian F, Zhao Y (2020) Bioinspired soft robotic caterpillar with cardiomyocyte drivers. Adv Func Mater 30:1907820
Karipoth P, Christou A, Pullanchiyodan A, Dahiya R (2022) Bioinspired inchworm-and earthworm-like soft robots with intrinsic strain sensing. Adv Intell Syst 4:2100092
C. Laschi (2016) Soft Robotics: from scientific challenges to technological applications, Micro-and Nanotechnology Sensors, Systems, and Applications VIII, SPIE2016, pp. 383–390.
Shin SR, Migliori B, Miccoli B, Li YC, Mostafalu P, Seo J, Mandla S, Enrico A, Antona S, Sabarish R, Zheng T, Pirrami L, Zhang K, Zhang YS, Wan Kt, Demarchi D, Dokmeci MR, Khademhosseini A (2018) Electrically driven microengineered bioinspired soft robots. Adv Mater 30:1704189
Hajra S, Sahu M, Padhan AM, Swain J, Panigrahi BK, Kim H-G, Bang S-W, Park S, Sahu R, Kim HJ (2021) A new insight into the ZIF-67 based triboelectric nanogenerator for self-powered robot object recognition. J Mater Chem C 9:17319–17330
Hajra S, Sahu M, Sahu R, Padhan AM, Alagarsamy P, Kim HG, Lee H, Oh S, Yamauchi Y, Kim HJ (2022) Significant effect of synthesis methodologies of metal-organic frameworks upon the additively manufactured dual-mode triboelectric nanogenerator towards self-powered applications. Nano Energy 98:107253
Liu Y, Chen B, Li W, Zu L, Tang W, Wang ZL (2021) Bioinspired triboelectric soft robot driven by mechanical energy. Adv Func Mater 31:2104770
Patino T, Mestre R, Sanchez S (2016) Miniaturized soft bio-hybrid robotics: a step forward into healthcare applications. Lab Chip 16:3626–3630
Tse ZTH, Chen Y, Hovet S, Ren H, Cleary K, Xu S, Wood B, Monfaredi R (2018) Soft robotics in medical applications. J Med Robot Res 3:1841006
Xie S, Zhang M, Meng W (2017) Soft robots for healthcare applications: design, modelling, and control. Inst Eng Technol 14:240
Yang Y, He Z, Jiao P, Ren H (2022) Bioinspired soft robotics: how do we learn from creatures. IEEE Rev Biomed Eng. https://doi.org/10.1109/RBME.2022.3210015
Kovač M (2014) The bioinspiration design paradigm: a perspective for soft robotics. Soft Robot 1:28–37
Pfeifer R, Lungarella M, Iida F (2012) The challenges ahead for bio-inspired “soft” robotics. Commun ACM 55:76–87
Won P, Ko SH, Majidi C, Feinberg AW, Webster-Wood VA (2020) Biohybrid actuators for soft robotics: challenges in scaling up. Actuators 9:96
Rossiter J, Hauser H (2016) Soft robotics—the next industrial revolution. EEE Robot Autom Mag 23:17–20
Kumar A (2018) Methods and materials for smart manufacturing: additive manufacturing, internet of things, flexible sensors and soft robotics. Manuf Lett 15:122–125
Apsite I, Salehi S, Ionov L (2021) Materials for smart soft actuator systems. Chem Rev 122:1349–1415
Rossiter J, Walters P, Stoimenov B (2009) Printing 3D dielectric elastomer actuators for soft robotics. Electroact Polym Actuator Dev 7287:149–158
Aracri S, Giorgio-Serchi F, Suaria G, Sayed ME, Nemitz MP, Mahon S, Stokes AA (2021) Soft robots for ocean exploration and offshore operations: a perspective. Soft Robot 8:625–639
Laschi C, Rossiter J, Iida F, Cianchetti M, Margheri L (2017) Soft robotics: trends applications and challenges. Springer, Berlin
Coevoet E, Morales-Bieze T, Largilliere F, Zhang Z, Thieffry M, Sanz-Lopez M, Carrez B, Marchal D, Goury O, Dequidt J (2017) Software toolkit for modeling, simulation, and control of soft robots. Adv Robot 31:1208–1224
Decroly G, Toncheva A, Blanc L, Raquez J-M, Lessinnes T, Delchambre A, Lambert P (2020) Programmable stimuli-responsive actuators for complex motions in soft robotics: concept design and challenges. Actuators 9:131
Rafsanjani A, Bertoldi K, Studart AR (2019) Programming soft robots with flexible mechanical metamaterials. Sci Robot 4:eaav7874
Acknowledgements
This work is supported by the DGIST R&D Program (22-RT-01; 22-HRHR-05; 22-SENS-01) governed by the Ministry of Science and ICT of Korea.
Author information
Authors and Affiliations
Contributions
SP: Conceptualization, Visualization, Writing—original manuscript; SH: Writing—Review & Editing; PMR: Visualization; HJK: Supervision, Funding acquisition, Writing—Review & Editing. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare there is no competing interests related to this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Panda, S., Hajra, S., Rajaitha, P.M. et al. Stimuli-responsive polymer-based bioinspired soft robots. Micro and Nano Syst Lett 11, 2 (2023). https://doi.org/10.1186/s40486-023-00167-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40486-023-00167-w