
Abstract
Background
Telemetry methods that allow low-cost, offshore tracking are required for the effective conservation and sustainable use of migratory fish in large lakes with vast and deep offshore areas. Surface drifting buoys, or drifters, are promising platforms for acoustic receiver attachment that have few operational constraints. However, the low recovery rate of drifters in the open ocean presents a challenge. In contrast, closed waters, such as lakes, are more suitable for operating drifters since drifting objects eventually strand on the shore. In this study, we examined the effectiveness of a single GPS-tracked drifter for telemetry surveys of the common carp Cyprinus carpio, which migrates throughout the large offshore area of a large lake, Lake Biwa, in Japan. Its performance was assessed regarding the success rate of drifter recovery, detection frequency of tagged individuals, search area of the drifter, and accuracy of detection locations.
Results
We successfully recovered the drifter during all eight deployments. In 6 deployments, tagged individuals were detected 777 times. The drifter successfully detected 48% (10 of 21) of the tagged individuals, exhibiting higher performance (10–33%) than fixed receivers used in other telemetry studies conducted on highly migratory fish species in the lake. The drifter scanned an area of 5.5–8.0 km2 per day. Based on the data obtained from the field trials, the horizontal location accuracy of detected individuals was estimated to be approximately 400 m in shallow coastal areas and 600 m in deep offshore areas. Furthermore, the horizontal distance of tagged individuals traveled was estimated to be between 2 and 9 km within a day.
Conclusion
Our newly developed method deploys and retrieves a single GPS drifter that allows low-cost, wide-ranging telemetry surveys in offshore areas of large lakes. The lack of boat noise, moderate moving speed, and continuity of observation range of the drifter seemingly enabled the efficient detection of tagged individuals. Thus, the drifter method offers a promising novel approach for acoustic telemetry in offshore waters that can operate in combination with large receiver arrays and other mobile platforms.
Similar content being viewed by others


Background
Acoustic telemetry is a powerful tool for studying fish migration in aquatic environments. However, balancing operational costs with coverage of the area where tagged individuals can be detected is an ongoing challenge [1,2,3]. Recently, researchers on large-scale receiver networks (e.g., the Great Lakes Telemetry Observation System [3]) have established collaborations and data sharing among multiple institutions and researchers. Nonetheless, the high cost of installing and operating many receivers presents a drawback, especially when researchers begin a telemetry study at a new study site with no existing receiver network nearby [3, 4]. Moreover, receiver installation may be challenging in deeper waters such as large lakes with deep offshore areas [1]. Large lakes are common diversity hotspots, and numerous fish species living within these ecosystems are endangered because of habitat modification and high fishing pressure [5,6,7]. Additional ecological and life history information is essential for effective conservation and sustainable use [8]. However, migration patterns from shallow nearshore to deep offshore areas, which constitute the most basic knowledge necessary for resource management of lake fishes, remain largely unknown because obtaining information on their movement solely from fishery-related data is challenging. Therefore, it is important to establish a method that requires low installation and operational costs to obtain location data from many highly migratory fish species in the offshore areas of large, deep lakes [9, 10].
Active tracking using shipboard receivers is also widely employed to study fish inhabiting lake offshore areas [9, 11]. However, this method requires a person to constantly monitor the location of a tagged individual, and the tracking period is often short, ranging from a few hours to several days [10, 12,13,14]. Furthermore, it is almost impossible to find fish when it has moved out of the range of the active tracking receiver. To overcome these challenges and reduce the economic and labor costs of tracking aquatic animals across a wide area, acoustic receivers can be mounted on various surfaces that are positioned or operated in offshore environments, such as autonomous underwater vessels (AUVs), fixed oceanographic observation buoys, and GPS-tracked buoys, known as drifters [15,16,17,18]. The pioneering use of drifters for acoustic telemetry was reported by Goulette et al. (2014), who fitted acoustic receivers to surface drifters and deployed them in the Gulf of Maine, an open ocean along the eastern coast of the United States [16]. Although drifters have been found to be potentially effective for detecting tagged fish, drifters’ low recovery rate is considered a significant challenge in open-sea exploration [16, 19]. In contrast to the open ocean, closed waters, such as lakes, are more suitable for operating drifters, and their recovery rates are higher since drifting objects eventually strand on the shore. As such, lakes provide a robust environment to test the use of drifters in fish telemetry.
When using drifters for telemetry studies, uncertainty in the position and an inability to control the drifter must be considered. Controlled-moving receivers (e.g., towed receivers and spot observations from boats) have also been used to locate tagged fish in open waters [17, 18, 20]. However, the usefulness of these devices may be hampered by underwater noise and limited observation time [13, 21, 22]. Compared to controlled-moving receivers, buoyancy-driven vehicles, such as gliders and drifters, are advantageous because they move through the water slowly and emit minimal noise [21]. Determining the positioning accuracy of uncontrolled drifters is necessary to evaluate their effectiveness. In most cases, Argos and GPS positioning are used to locate moving receivers; however, both methods have certain positioning errors [23, 24]. If a drifting receiver detects a tagged individual at a certain location, the individual’s actual location must be within the receiver’s detection range plus the drifter’s positioning error. While the positioning errors of Argos are within approximately 250–1500 m depending on the location class (Classes 3, 2, 1, 0, A, B, and Z in order of accuracy [23]), those of GPS are generally a few to a hundred meters depending on device performance. Therefore, GPS positioning may provide information about fish movement at a finer scale than Argos; however, the positioning accuracy of GPS drifters needs to be evaluated before their use in lake environments.
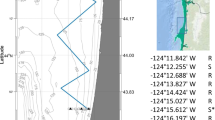
Lake Biwa is a large lake located in the middle of Honshu Island on the Japanese archipelago (Fig. 1). Lake Biwa is one of 20 ancient lakes in the world and encompasses a biodiversity hotspot, harboring more than 1000 species/subspecies including 13 endemic fish species/subspecies [25,26,27,28,29]. Many endemic fish species present in the lake have evolved to utilize the extensive pelagic and deep zones during their life cycles [30]. For example, the common carp Cyprinus carpio in Lake Biwa moves into shallow nearshore water (< 20 m) or migrates into feeder rivers to spawn in the spring and summer [31,32,33,34]. Outside the spawning season, in the fall and winter they inhabit deeper “offshore” regions of the lake (of depth > 20 m) [31, 34,35,36,37,38]. These deeper offshore regions have, in the past few decades, been negatively impacted by climate change that limits vertical mixing causing prolonged benthic hypoxia [39, 40]. These environmental changes may adversely affect fish survival and growth [41,42,43]. To facilitate fish conservation in Lake Biwa, it is necessary to understand the entire migration process, including the use of both spawning grounds in shallow nearshore water and nursery grounds in deep offshore water [33, 44, 45]. However, offshore telemetry studies in the lake are challenging because of the lake depth (104 m at its deepest point; > 60% of the northern basin is > 60 m deep; Fig. 1). In such a deep lake, the installation of fixed receivers in deeper offshore regions is labor- and cost-intensive, and difficult to implement. Instead, researchers conducting previous telemetry studies on Lake Biwa installed more than 30 receivers along the lake shore to reveal the migratory behavior of two crucian carp species that exhibit seasonal migration between shallow nearshore and deep offshore waters [44, 45]. However, most tracking data were obtained during the spawning season when tagged fish were in shallow nearshore waters, highlighting the challenge of tracking individuals during non-spawning season when they moved to deep offshore water in the lake [44, 45]. Considering these examples, a wide-area search method using drifters may provide a unique, breakthrough approach to study fish migration in lakes.

Geographical location of the study site. Map of the study site, Lake Biwa, central Japan. The offshore area of the lake (depth > 20 m) is indicated by a dashed line. The star symbols indicate where the drifter was deployed in the eight trials. Red triangles indicate where the nearshore and offshore range tests were conducted. Blue symbols with bold Italic site codes indicate where tagged fish were released (details of fish tagging are summarized in Additional File 1: Table S1)
Here, we conducted a telemetry study to ascertain the effectiveness of GPS drifters to investigate fish migration within a large lake. To evaluate the effectiveness of the drifters, we aimed to answer three questions: (1) Can the drifter detect the signals of tagged individuals in the deep offshore region of the lake?; (2) How accurate is the estimated location of an individual based on signal detection by the drifter?; and (3) How wide an area can the drifter search immediately or per day?.
Methods
Study site
Lake Biwa is located in central Japan, with a surface area of 670 km2 and a circumference of 235 km [46] (Fig. 1). The lake has 118 feeder rivers that originate from the surrounding mountains, and the only outlet is the Seta River, located at the southern end of the lake. The lake consists of two major basins: the North Basin and South Basin. The North Basin has a large, deep pelagic zone (surface area: 618 km2; mean depth: 43 m; maximum depth: 104 m) and various substrate types, such as rocks, pebbles, and sands. In contrast, the South Basin is small and shallow (surface area: 52 km2; average depth: 4 m; maximum depth: 7 m) and is mainly characterized by a littoral environment. In the North Basin, a thermocline forms at a depth of 5–30 m during May–November (stratified period), whereas it disappears and is absent during December–April (mixing period). During the stratified period, stable horizontal water circulations called gyres are present in the surface layer of the basin, possibly created and maintained by the prevailing northerly winds in the northern area of the basin [47,48,49,50,51,52,53,54]. In contrast, gyres disappear during the mixing period; instead, strong northwesterly monsoons often create southeastward drift currents in the area [50, 51].
Study animals
In this study, we captured 21 common carp, tagged them with acoustic transmitters (see below for more information), and released them at 8 sites in 3 areas of the northern part of the North Basin (Fig. 1) from fall 2018 to summer 2020 (Additional file 1: Table S1). An electric fish shocker (Electrofisher LR-20B, Smith-Root Inc., WA, USA) and local fishers were used to capture common carp in shore reed zones (n = 8), feeder rivers (n = 9), and on gravelly beach shores (n = 4) (Additional file 1: Table S1). Before tagging, each fish was anesthetized in a 0.05% solution of 2-phenoxyethanol for 10–15 min until the fish began to float upside down [55,56,57]. After anesthesia, each fish was measured and weighed. Subsequently, a small incision (approximately 3 cm in length) was made on the ventral side (off midline) of the fish, and an ultrasonic transmitter (V9-1L, V13-1H, or V16-4H; Innovasea Systems Inc., Canada) was placed in the ventral cavity [55, 58]. The incision was sutured using a biodegradable string. The transmitter produced a set of 69 Hz coded ultrasonic pulses (a “signal”) that provided fish ID. The signals were emitted randomly between 90 and 150 s (average: 120 s) throughout the expected battery life. After surgery, a dart tag (PDS; Hall Print Inc., Canada) was attached to the base of the dorsal fin for external identification [58, 59]. The individual was then maintained in fresh lake (or river) water for approximately 20 min to allow the anesthetic to wear off. The fish were released into the lake (or river) after normal swimming behavior was confirmed. Except for individual K040, which was translocated offshore for another biologging study [not described in this paper], all tagged individuals were released near their capture site (Fig. 1, Additional file 1: Table S1).
Equipment
The drifter was comprised of four parts: (1) a GPS-Argos satellite communication unit (ABU-1005G “Sea horse,” Nomad Science Inc., Japan), (2) an acoustic receiver (VR2W, Innovasea Systems Inc., Canada), (3) a ring-shaped foamed polyethylene float (TSR-400, Toyo Bussan Co. Ltd., Japan), and (4) protective equipment made of PVC pipes (Fig. 2A). The GPS-Argos unit consisted of three parts: a metal cylinder with an Argos transmitter and GPS receiver, an antenna for satellite communication, and a battery case that was covered with a waterproof acrylic cover (Fig. 2A). The main body of the GPS-Argos unit was housed inside a PVC pipe. The receiver was externally mounted on the outside of the protective PVC pipe (Fig. 2A). When placed on the water surface, the height of the upper part of the buoy (above the float) was approximately 20 cm and the length of the underwater part was approximately 60 cm (Fig. 2A, B). The float provided sufficient buoyancy to maintain the antenna above surface level (Fig. 2C). To ensure buoy retrieval, our contact information was provided on the top of the float and on the side of the receiver (Fig. 2B–D).

Description of the drifter used in the present study. A A cross-sectional view of the drifter. B–D Photographs of the drifter before deployment (B), just after onshore deployment (C), and before retrieval on the beach where it was stranded (D)
The drifter recorded its GPS position at regular intervals (every minute for the range test experiment and every 2 min for the drifter experiment; see information below) and the latest position information was transmitted to the Argos satellite at 90 s intervals. A GPS board (GPM-DD606, Shanghai Dandi Communication Tech. Co., China) built into the unit had a nominal positioning error of 2.5 m. The unit was powered by five D-size batteries and had a battery life of approximately 35 days. The receiver recorded the signals transmitted from the tagged fish and the detection time.
Field experiments
Two field experiments were conducted in Lake Biwa: (i) the drifter experiment, in which we attempted to detect tagged individuals using the drifter as well as to evaluate how wide an area can it searches for and (ii) a range test experiment to verify the detection range of the receiver mounted on the drifter.
Drifter experiment
We conducted eight drifter deployment trials from January to March 2021, which is considered a non-spawning season for common carp, to detect the signals of 21 common carp captured and released near the lakeshore in 2018–2020. Drifter deployments were initiated at various locations and wind directions (Table 1). The drifter was manually deployed and retrieved according to the following protocol (Fig. 3A). For the two deep water deployments, we used a motor vessel “Biwakaze” (overall length: 28.1 m, overall breadth: 6.2 m, overall depth: 2.4 m, gross tonnage: 71 t) from the Lake Biwa Environmental Research Institute. The drifter was dropped from the boat deck to the water surface. For the six lakeshore deployments, the drifter was manually floated on the water surface where the water depths were > 0.6 m and then released. Five of the six deployments were conducted near the mouth of the feeder rivers, mainly on windy days (Table 1), because we expected that strong offshore winds (and currents) would allow the drifter to easily reach deep offshore areas. Once the drifter was deployed, its location was monitored using the GPS positional data uploaded to the Argos system’s website (Fig. 3A).

Schematic design of the present study. A In the drifter deployments, the drifter was deployed either from beaches or river mouths or from vessels at offshore locations. When the drifter encountered a tagged fish, the receiver recorded its signals. GPS positions were logged by the drifter and uploaded to the Argos system whenever the drifter communicated with satellites. The drifter was retrieved after becoming stranded on the shore. B Setting of the range tests in shallow nearshore area. First, the two test transmitters were placed at a depth of 60–70 cm, approximately 10 cm above the sandy bottom. After the transmitters were fixed, the drifter was placed near the transmitters (< 5 m) for approximately 10 min. The drifter was then moved toward the center of the river mouth and released into the river flow. The transmitters were left in the water at the same location for the next 4–24 h to ensure that the drifter reached a sufficiently large distance from the transmitters such that the transmitters were out of the drifter’s detection range. The drifter was stranded on the lake shore and retrieved 2–3 days after deployment. C The range test in deep offshore area was conducted using a fishing boat. After arriving at a suitable location where the water depth exceeded 50 m, the boat engine was turned off to reduce noise. The test transmitters were placed in the water at a depth of approximately 20 m before the drifter was placed on the water surface from the boat and released. The boat drifted with its engine turned off for approximately 3.5 h after drifter deployment
Range test experiment
The detection range of the receiver was verified using test transmitters under two conditions: shallow and deep waters (Fig. 3B, C). Two transmitters (V13-1H and V16-4H) were used for the test. Range tests in shallow nearshore area were conducted at the mouth of the Chinai River on October 1st and 6th, 2021 (Fig. 1). The two test transmitters were placed at a depth of 60–70 cm, approximately 10 cm above the sandy bottom and the drifter was then released into the river current at the river mouth (Fig. 3B). After the drifter was stranded on the lake shore, the GPS data and detection data were downloaded from the drifter and receiver, respectively. The range test in the deep offshore area was conducted using a fishing boat (overall length: 8.5 m, overall breadth: 2.2 m, overall depth: 0.9 m, gross tonnage: 1.4 t) southeast of Chikubushima Island on November 1st, 2021 (Fig. 1). After arriving at a suitable location where the water depth exceeded 50 m, the test transmitters were placed in the water at a depth of approximately 20 m before the drifter was placed on the water surface from the boat and released (Fig. 3C). The boat drifted with its engine turned off for approximately 3.5 h after buoy deployment. Since the differences in the moving speed of the drifter and the boat gradually decreased (i.e., the drifter became as fast as the boat), we turned the boat engine on for a few minutes and moved away twice to continue the test at a greater distance. The GPS track of the boat during the test was recorded every minute using a handheld GPS (Garmin GPSMAP 64SJ; Garmin Ltd., Taiwan).
Data analyses
GPS positional data were downloaded from the drifter using GPS software ver. 2.1.5 provided by Nomad Science Inc. and mapped using Google Earth Pro ver. 7.3.4.8248 (64-bit). The GPS positions obtained before deployment and those after the drifter became stranded were manually removed. In cases when the GPS data were unavailable, the most accurate “Class 3” Argos location data (accuracy: < 250 m [23]) were included in our analyses.
Fish detection data were downloaded from the receiver using VUE software provided by Innovasea Systems Inc. To maximize data efficiency, we considered single detections valid if corroborated by ancillary information (e.g., detections at fixed receivers deployed at the shoreline or past track history) as described by Goulette et al. (2014) [16]. The fish detection data were integrated with the GPS track of the drifter by matching the timestamps of both datasets. While we could obtain GPS data from the drifter at 2 min intervals, the signal emission interval of the transmitters was random at 90–150 s (once every 2 min on average). Therefore, we considered the GPS position closest to where the signal was detected as the location where the individual was detected.
The drifter’s GPS tracks and fish detection position data mapped onto the GPS tracks were then analyzed using QGIS ver. 3.18.1. The fTools plug-in in the software was used to analyze the distances between GPS points as follows: First, to measure how far the drifter reached offshore in each trial, the maximum distance from the shoreline (Dshore) was determined. This value was calculated as “the maximum value among the distance between a single location of the drifter and the nearest lakeshore,” obtained for all GPS points on the drifter trajectory. Then, the maximum distance from the drifter deployment site to the furthest detection point (Dmigrate) and the maximum distance between the two furthest detection points (Ddetect) were determined to observe each individual’s range of movement.
The speed of the drifter, as well as the distance traveled by the drifter, was calculated using Igor Pro ver. 8.04 (Wave Metrics Inc., OR, USA) to determine its characteristics as a telemetry platform. As individual GPS positions can have positioning errors of several tens of meters, the GPS track was split into sections of 20 min each. Subsequently, the median latitude and longitude of the GPS points within each section (10 points) were determined as the representative points of the section. The speed of the drifter was calculated by dividing the distance between the sections by the travel time (20 min). The distance traveled by the drifter was calculated as the sum of the distances between the sections.
The accuracy of the (horizontal) location of tagged individuals was evaluated based on the following considerations: (1) the detection range of the receiver, (2) the positioning error due to the performance of the GPS board built into the drifter, and (3) the timing gap between GPS positioning and signal detection, which became apparent in processing the data from the drifter trials. Furthermore, although data were unavailable, we also considered that (4) the horizontal detection distance becomes shorter when the transmitter (individual) is at a greater depth (e.g., close to 100 m) (Additional file 2: Figure S1).
Results
Drifter experiment
We successfully retrieved the drifter in all eight deployments (Table 1). In five deployments, where the drifter was deployed offshore (deployments #1 and #6) or at a river mouth under strong wind conditions (deployments #3, #4, and #8), the drifter traveled east or southeastward for 2–5 d and reached the east or southeast coast of the lake (Fig. 4). The total distance traveled by the drifter was 23.4 ± 7.8 km, the mean travel speed was 6.3–9.7 m min−1, and the maximum distance from the nearest shoreline (Dshore) was 5.3–6.8 km (Table 2). In the remaining three deployments (#2, #5, and #7), the distance traveled by the drifter was 0.4–1.4 km, the mean travel speed was 1.2–3.8 m min−1 (Table 2, Additional file 2: Fig. S2), and the maximum distance from the nearest shoreline was 0.2–0.6 km (Table 2). Excluding the three deployments in which the drifter returned to shore immediately after its release, it covered a total area of 11.1–30.3 km2 (based on a conservative estimate of 300 m of the receiver’s detection range) (Table 2).

GPS tracks of the drifter deployed in Lake Biwa. The colored arrows and crosses indicate the locations where the drifter was deployed and retrieved, respectively. Each color represents one deployment: blue (#1), gray (#2), light green (#3), light orange (#4), red (#5), pink (#6), green (#7), and orange (#8). The black arrows show the direction of drifter movement. The offshore area of the lake (depth > 20 m) is indicated by a dashed line. Note that the Argos locations of the drifter in the latter half of deployment #8 are shown with triangles and dotted lines because GPS positions were unavailable because of mechanical failure
During the eight deployments conducted for approximately 2 months (25 days total), ten tagged carp were detected by the drifter in six of the eight trials (Tables 2 and 3). The total number of detections was 777 (1–328 per individual) (Table 3). For each individual, the distance from the release site to the most distant detection site (Dmigrate) ranged from 1.8 to 12.6 km. The maximum distance between the detection sites for individuals detected more than once (Ddetect) was 0.02–8.6 km. All of the sites where the tagged fish were detected extended offshore of the North Basin (Fig. 5), except for one individual (K023), which was detected only near the mouth of the Adogawa River (green plots in Fig. 5H).

Locations of release and detection of tagged fish. A–I Each colored circle indicates a single detection, and its color denotes the deployment in which the focal fish was detected. Filled triangles indicate where the tagged fish were captured and released (A–F, H, I). The locations where a fish (K040) was captured and translocated for release are indicated by open and closed triangles, respectively (G). Two individuals (K023 and K026) that were released from the same site and detected in a single deployment are shown in the same panel (H)
Range test experiments
In the two range tests conducted in shallow nearshore waters, signal detection was continuously successful up to an approximate distance of 280 m (Additional file 2: Figure S3). During the experiment in deep offshore water, the drifter continuously detected signals from both transmitters when the distance between the drifter and transmitters (i.e., the boat) was within approximately 480 m (Additional file 2: Figure S4).
Estimated location accuracy of individuals detected by the drifter
In shallow nearshore waters, (1) the detection range of the receiver was 300 m, (2) the GPS error of the drifter was ~ 70 m (Additional file 2: Figure S5), and (3) the timing gap between GPS positioning and signal detection corresponded to a maximum distance of 26 m (Additional file 2: Figure S6), resulting in a radius of approximately 400 m (Table 4). In deep offshore waters, (1) the detection range was 500 m, (2) the GPS error was ~ 70 m, (3) the timing gap was a maximum of 26 m, and (4) the reduction in horizontal distance by depth was a maximum of 10 m (Additional file 2: Figure S1), resulting in a radius of approximately 600 m (Table 4).
Discussion
Effectiveness of the drifter method in a lake environment
The results of the drifter experiment indicated that the method of repeatedly deploying a single drifter can be employed to effectively search for and detect tagged individuals in the offshore areas of a lake. During the eight deployments conducted over approximately 2 months (25 days total), the drifter detected 48% (10 of 21) of the tagged individuals. In addition, nine tagged individuals were detected mainly in the deep offshore waters of the North Basin. Although several telemetry studies have previously been conducted in Lake Biwa [44, 45, 60], this is the first study in the lake that has successfully detected tagged individuals at multiple locations in deep offshore regions. Previous studies by Mitsunaga and his colleagues installed acoustic receivers on three water quality observation towers moored in the deep offshore region of the North Basin and reported that the ratio of detected to tagged individuals was 33% for Biwa salmon Oncorhynchus masou subsp. and 10% for Gengoro-buna crucian carp Carassius cuvieri; the numbers of detection sites were limited to three and one, respectively [45, 60]. Generally, fixed receivers are effective when numerous individuals aggregate within a specific area (e.g., spawning grounds) or pass through a known location (e.g., channels or fishways) because the fixed receivers provide constant observation at the set location [1, 58]. By contrast, the drifter method uses a belt transect to search for individuals along the movement path of the drifter. Therefore, during periods when individuals disperse over a wide area (e.g., non-spawning season) or if sites where individuals aggregate (e.g., spawning or feeding ground) are not specified, the effectiveness of the drifter increases and exceeds that of fixed receivers.
Positioning accuracy of the drifter for locating tagged fish
Although drifters provide lower accuracy (higher uncertainty) in estimating the location of detected individuals than fixed receivers, the location accuracy of detected fish (400 m in shallow and 600 m in deep areas) is sufficient to understand the distribution and movement of fish migration through large lakes such as Lake Biwa. The drifter detected ten individuals at multiple locations over a wide area covering the northern half of the North Basin, revealing a long-range, lake-wide seasonal migration of the species for the first time. In addition, the drifter encountered five individuals (K012, K025, K031, K034, and K040) at multiple locations 2–9 km apart within a single day, providing partial information about the daily range of their horizontal movement. In Lake Biwa, such long-distance movement was detected by a coastal receiver array only in one individual round crucian carp Carassius buergeri grandoculis, which moved 16.7 km in 40 h [44]. Considering the effectiveness of the drifter method in which only one drifter is used, simultaneously operating multiple drifters is likely to increase the number of detected individuals, number of times each individual is detected, and detection area of each individual.
Features and challenges of the drifter method
When using multiple drifters simultaneously, the unpredictability of drifter trajectories is the greatest problem. Once released, the drifter travels through the lake by both wind and currents; however, neither can be predicted with high accuracy on a local (5 or 10 km) scale for several days or more. Furthermore, it is impossible to predict whether the wind or currents will have a greater influence on drifter movement. Therefore, the trajectory of each drifter cannot be predicted, and the effects of wind and currents on the movement of the drifter can only be determined after obtaining the trajectory data from the recovered drifter. In other words, the areas over which drifters search and the locations where they become stranded are uncontrollable. However, if the surface currents of the lake are partially predictable (e.g., the presence of gyres or drift currents generated by prevailing seasonal winds), one can roughly predict a likely route (based on the site of deployment and possible stranding sites) of the drifter through several pilot trials if repeated regularly. If a predictable route can be determined, deploying multiple drifters from different sites can efficiently widen the area covered. Drifters’ dependence on winds and currents may, however, cause some biases for locating fish in nearshore shallow waters because the days on which the drifter can be deployed from the lake shore are limited. For example, the behavior of fishes may change in accordance with specific wind or flow conditions [55, 61,62,63]. Deploying a fixed receiver at sites where drifters are released may help correct such biases.
In this study, we established a method for drifter deployment from the lake shore that enables low-cost and highly reliable offshore observations. The two key features of this method are easy deployment and reliable recovery at the shore. First, the drifter used in the present study had a shorter underwater portion to avoid contact with commercial fishing gear; therefore, it was easy to deploy from the shore. Specifically, one can deploy the drifter by hand (without using a vessel) while letting it drift offshore without being stranded if river flow or a strong wind creates an offshore current at a shallow site (< 1 m depth). This easy-to-deploy feature enables the low-cost deployment of acoustic receivers in deep areas of the lake. Second, the use of drifters in closed water (i.e., lakes) naturally leads to a high recovery rate of drifters in the field. During deployments in the lake, the drifter was successfully recovered on all eight occasions. This high recovery rate (100%) significantly exceeded that of previous drifter surveys conducted in the open ocean, with recovery rates of 46% [16]. The main difference between a closed lake and an open ocean is, as expected, that floating objects can be washed up onto the lakeshore relatively frequently, either by wind or waves. One possible concern is the structural robustness of drifters. When the drifter washed ashore onto wave-dissipating blocks during rough weather (e.g., deployment #8), the antenna cover was damaged, and water entered the communication unit (consisting of the Argos transmitter and GPS module), causing it to malfunction. To prevent damage to the drifter from unexpected events, extending the protective pipes to cover the above-water portion of the drifter could enhance the impact resistance of the drifter and thus ensure a high recovery rate in the field. As for increasing the recovery rate, previous drifter studies have stressed the importance of building a cooperative relationship between fishermen and other stakeholders in study areas. As such, broad announcements and frequent communication with such stakeholders before and during drifter deployments not only help prevent unprecedented challenges while operating drifters but also increase the chance of recovering drifters successfully.
Future perspective for applications of the drifter method
The drifter method established in this study offers several potential directions for future development. First, we expect the drifter to serve as a dual observation platform that enables the simultaneous observation of fish migration and lake currents at various spatial and temporal scales. Since we repurposed a satellite communication buoy originally for water current measurements to a drifter for telemetry surveys, we could naturally extract information of water currents from its trajectory data. Therefore, we could observe fish behavior and the water currents in the study area simultaneously. Second, drifters can potentially serve as platforms for the in situ observation of various physical and chemical parameters, such as water temperature, dissolved oxygen, and chlorophyll concentrations, given that such multimodal environmental measurements have become increasingly popular in recent years [64,65,66]. As confirmed in this study, the recovery rate of the drifter in the closed water lake was very high, making it suitable for mounting instruments that require recovery to obtain (i.e., download) data. Integrating these physical and chemical parameters with telemetry data on the position and movement of a given organisms, as well as wind and current data estimated from drifter trajectories, will provide a more comprehensive understanding of the interaction between the migration of an organism and its surrounding environment.
Conclusions
We show that low-cost wide-area telemetry surveys in offshore areas of large lakes are feasible by repeatedly releasing and retrieving a small, lightweight drifter that combines a satellite communication buoy and an acoustic receiver. This result suggests that a lack of boat noise, a moderate moving speed, and observation continuity (both temporal and spatial) seem to contribute to the effectiveness of drifters in detecting tagged fish. The data obtained from the drifter provide an estimation of the horizontal positions of tagged individuals with an accuracy of approximately 400 m in shallow coastal waters and 600 m in deep offshore waters. Furthermore, the drifter provides information on the horizontal movement of tagged individuals (although fragmentarily) over timescales from several hours or longer. As our drifter method does not require receiver installation at fixed stations or vessels (and researchers onboard) during observation, it is very economical and labor cost-effective for long-term monitoring. On the other hand, the drifters’ dependence on physical conditions, such as winds and currents, may cause biases in collecting behavioral data particularly in nearshore waters as those conditions may change fish behavior in shallow waters. Comparing the dataset obtained by drifters with that obtained by fixed receivers (or other controlled-moving receivers) cannot only prevent and correct for such biases but also provide insight into the behavioral response of fishes to their surroundings. Thus, the drifter method offers a promising novel option for acoustic telemetry surveys in offshore waters that can operate in combination with existing large coastal receiver networks and other mobile telemetry platforms.
Availability of data and materials
The datasets used and/or analyzed during the current study are available from the corresponding author upon reasonable request.
References
Heupel MR, Semmens JM, Hobday AJ. Automated acoustic tracking of aquatic animals: scales, design and deployment of listening station arrays. Mar Freshw Res. 2006;57:1–13.
Kraus RT, Holbrook CM, Vandergoot CS, Stewart TR, Faust MD, Watkinson DA, et al. Evaluation of acoustic telemetry grids for determining aquatic animal movement and survival. Met Ecol Evol. 2018;9:1489–502.
Krueger CC, Holbrook CM, Binder TR, Vandergoot CS, Hayden TA, Hondorp DW, et al. Acoustic telemetry observation systems: challenges encountered and overcome in the Laurentian Great Lakes. Can J Fish Aquat Sci. 2018;75:1755–63.
Burnett MJ, O’Brien GC, Jacobs FJ, Botha F, Jewitt G, Downs CT. The southern African inland fish tracking programme (FISHTRAC): an evaluation of the approach for monitoring ecological consequences of multiple water resource stressors, remotely and in real-time. Ecol Indic. 2020;111:106001.
Sala OE, Stuart Chapin F, Armesto JJ, Berlow E, Bloomfield J, Dirzo R, et al. Global diversity scenarios for the year 2100. Science. 2000;287:1770–4.
Abell R. Conservation biology for the biodiversity crisis: a freshwater follow-up. Conserv Biol. 2002;16:1435–7.
Kostoski G, Albrecht C, Trajanovski S, Wilke T. A freshwater biodiversity hotspot under pressure—assessing threats and identifying conservation needs for ancient Lake Ohrid. Biogeosciences. 2010;7:3999–4015.
Dudgeon D, Arthington AH, Gessner MO, Kawabata ZI, Knowler DJ, Lévêque C. Freshwater biodiversity: importance, threats, status and conservation challenges. Biol Rev. 2006;81:163–82.
Cooke SJ, Midwood JD, Thiem JD, Klimley P, Lucas MC, Thorstad EB, et al. Tracking animals in freshwater with electronic tags: past, present and future. Anim Biotelemetry. 2013;1:1–19.
Thorstad EB, Rikardsen AH, Alp A, Økland F. The use of electronic tags in fish research–an overview of fish telemetry methods. Turk J Fish Aquat Sci. 2013;13:881–96.
Hussey NE, Kessel ST, Aarestrup K, Cooke SJ, Cowley PD, Fisk AT, et al. Aquatic animal telemetry: a panoramic window into the underwater world. Science. 2015;348:1255642.
Landsman SJ, Nguyen VM, Gutowsky LFG, Gobin J, Cook KV, Binder TR, Lower N, McLaughlin RL, Cooke SJ. Fish movement and migration studies in the Laurentian Great Lakes: Research trends and knowledge gaps. J Gt Lake Res. 2011;37:365–79.
Eiler JH, Grothues TM, Dobarro JA, Masuda MM. Comparing autonomous underwater vehicle (AUV) and vessel-based tracking performance for locating acoustically tagged fish. Mar Fish Rev. 2013;75:27–42.
Watanabe YY, Papastamatiou YP. Biologging and biotelemetry: tools for understanding the lives and environments of marine animals. Annu Rev Anim Biosci. 2023;11:247–67.
Oliver MJ, Breece MW, Fox DA, Haulsee DE, Kohut JT, Manderson J, Savoy T. Shrinking the haystack: using an AUV in an integrated ocean observatory to map Atlantic Sturgeon in the coastal ocean. Fisheries. 2013;38:210–6.
Goulette GS, Hawkes JP, Kocik JF, Manning JP, Music PA, Wallinga JP, Zydlewski GB. Opportunistic acoustic telemetry platforms: benefits of collaboration in the Gulf of Maine. Fisheries. 2014;39:441–50.
White CF, Lin Y, Clark CM, Lowe CG. Human vs robot: Comparing the viability and utility of autonomous underwater vehicles for the acoustic telemetry tracking of marine organisms. J Exp Mar Biol Ecol. 2016;485:112–8.
Lennox RJ, Aarestrup K, Cooke SJ, Cowley PD, Deng ZD, Fisk AT, et al. Envisioning the future of aquatic animal tracking: technology, science, and application. Bioscience. 2017;67:884–96.
Goulette GS, Hawkes JP, Kocik JF, Manning JP, Matzen E, Van Parijs S, et al. Opportunistic acoustic telemetry platforms: an update on the Northeast Fisheries Science Center’s collaborative monitoring program in the Gulf of Maine, 2005–2018. NOAA Technical Memorandum. 2021. NMFS-NE-265.
Martins APB, Heupel MR, Bierwagen SL, Chin A, Simpfendorfer CA. Tidal–diel patterns of movement, activity and habitat use by juvenile mangrove whiprays using towed-float GPS telemetry. Mar Freshw Res. 2020;72:534–41.
Cimino M, Cassen M, Merrifield S, Terrill E. Detection efficiency of acoustic biotelemetry sensors on Wave Gliders. Anim Biotelem. 2018;6(1):1–14.
Aspillaga E, Arlinghaus R, Martorell-Barceló M, Follana-Berná G, Lana A, Campos-Candela A, Alós J. Performance of a novel system for high-resolution tracking of marine fish societies. Anim Biotelem. 2021;9(1):1–14.
CLS (Collecte Localisation Satellites). Argos user's manual. 2017. http://www.argos-system.org/manual/. Accessed 22 Sep 2022.
Centurioni LR, Hormann V, Chao Y, Reverdin G, Font J, Lee DK. Sea surface salinity observations with Lagrangian drifters in the tropical North Atlantic during SPURS: Circulation, fluxes, and comparisons with remotely sensed salinity from Aquarius. Oceanogr. 2015;28:96–105.
Kawanabe H. Asian great lakes, especially Lake Biwa. Environ Biol Fish. 1996;47:219–34.
Rossiter A. Lake Biwa as a topical ancient lake. Adv Ecol Res. 2000;31:571–98.
Nishino M. Conservation and restoration of biodiversity of the lagoons or attached lakes around Lake Biwa, the largest lake in Japan. Sci Environ Sustain Soc. 2008;5:13–30.
Okuda N, Watanabe K, Fukumori K, Nakano SI, Nakazawa T. Origin and diversification of freshwater fishes in Lake Biwa In Biodiversity in aquatic systems and environments. Berlin: Springer; 2014.
Hampton SE, McGowan S, Ozersky T, Virdis SG, Vu TT, Spanbauer TL, et al. Recent ecological change in ancient lakes. Limnol Oceanogr. 2018;63:2277–304.
Tabata R, Kakioka R, Tominaga K, Komiya T, Watanabe K. Phylogeny and historical demography of endemic fishes in Lake Biwa: the ancient lake as a promoter of evolution and diversification of freshwater fishes in western Japan. Ecol Evol. 2016;6:2601–23.
Furukawa M. Seasonal migration of two types of Lake Biwa common carp as seen from catching sites. Sci Rep Shiga Prefect Fish Exp Stn. 1966;19:1–5.
Nakamura M. Cyprinid fishes of Japan: Studies on the life history of Cyprinid fishes in Japan. Spec Publ Res Inst Nat Resources. Tokyo: Research Institute of Natural Resources; 1969.
Mabuchi K, Matsuzaki SS. Common carp in Japanese natural waters: current status of native species and threats of introduced species. Jpn J Ichthyol. 2017;64:213–218.
Uchii K, Doi H, Yamanaka H, Minamoto T. Distinct seasonal migration patterns of Japanese native and non-native genotypes of common carp estimated by environmental DNA. Ecol Evol. 2017;7:8515–22.
Mabuchi K, Senou H, Takeshima H, Nakai K, Nishida M. Distribution of native Japanese mtDNA haplotypes of the common carp (Cyprinus carpio) in Lake Biwa. Jpn J Ichthyol. 2010;57:1–12.
Yoshida MA, Totsu K, Sato K, Mabuchi K. Underwater video and still-image dataset of fishes and other aquatic animals in Lake Biwa, Japan, observed via carp-mounted video loggers. Ecol Res. 2020;35:1001–8.
Nishino M. Ecological changes in Lake Biwa In Lake Biwa: Interactions between nature and people. Dordrecht: Springer; 2011.
Atsumi K, Song HY, Senou H, Inoue K, Mabuchi K. Morphological features of an endangered Japanese strain of Cyprinus carpio: reconstruction based on seven SNP markers. J Fish Biol. 2017;90:936–57.
Yoshimizu C, Yoshiyama K, Tayasu I, Koitabashi T, Nagata T. Vulnerability of a large monomictic lake (Lake Biwa) to warm winter event. Limnology. 2010;11:233–9.
Koue J. Evaluation of the impact of meteorological factors on the stratification of structure in Lake Biwa, Japan. Hydrology. 2022;9:16.
Pollock MS, Clarke LMJ, Dubé MG. The effects of hypoxia on fishes: from ecological relevance to physiological effects. Environ Rev. 2007;15:1–14.
Vaquer-Sunyer R, Duarte CM. Thresholds of hypoxia for marine biodiversity. Proc Natl Acad Sci USA. 2008;105:15452–7.
Itai T, Hayase D, Hyobu Y, Hirata SH, Kumagai M, Tanabe S. Hypoxia-induced exposure of isaza fish to manganese and arsenic at the bottom of Lake Biwa, Japan: experimental and geochemical verification. Environ Sci Tech. 2012;46:5789–97.
Kunimune Y, Mitsunaga Y, Komeyama K, Matsuda M, Kobayashi T, Takagi T, Yamane T. Seasonal distribution of adult crucian carp nigorobuna Carassius auratus grandoculis and gengoroubuna Carassius cuvieri in Lake Biwa, Japan. Fish Sci. 2011;77:521–32.
Kunimune Y, Mitsunaga Y. Multiyear use for spawning sites by crucian carp in Lake Biwa, Japan. J Adv Mar Sci Tech Soc. 2018;24:19–30.
Herdendorf CE. Large lakes of the world. J Great Lakes Res. 1982;8:379–412.
Morikawa M, Okamoto I. The surface currents of Lake Biwa-ko deduced from drift-bottle experiments. Jpn J Limnol. 1960;21:173–86.
Imasato N, Kanari S, Kunishi H. Study on the currents in Lake Biwa (I). J Oceanogr Soc Jpn. 1975;31:15–24.
Oonishi Y, Imasato N. Study on the currents in Lake Biwa (II). J Oceanogr Soc Jpn. 1975;31:53–60.
Endoh S, Okamoto I, Kishida R, Kimura T. Continuous records of water currents in Lake Biwa (I): time variation of currents off Hikone and off ado river. Water Temp Res. 1982;26:35–47.
Okumura Y, Endoh S. Continuous current measurements in Lake Biwa (I): methods and some results. Jpn J Limnol. 1985;46:135–42.
Edagawa H. On the climate of Lake Biwa, western Japan. Geogr Rev Jpn Ser A. 1986;59:589–605.
Endoh S, Okumura Y. Gyre system in lake Biwa in Japan derived from recent current measurements. Jpn J Limnol. 1993;54:191–7.
Endoh S, Watanabe M, Nagata H, Maruo F, Kawae T, Iguchi C, Okumura Y. Wind fields over Lake Biwa and their effect on water circulation. Jpn J Limnol. 1995;56:269–78.
Kamimura H, Mitsunaga Y. Temporal and spatial distributions of Biwa salmon Oncorhynchus masou subsp. by ultrasonic telemetry in Lake Biwa Japan. Fish Sci. 2014;80:951–61.
Yamamitsu S, Itazawa Y. Effects of anesthetic 2-phenoxyethanol on the heart rate, ECG and respiration of carp. Nippon Suisan Gakkaishi. 1988;54:1737–46.
King W, Hooper B, Hillsgrove S, Benton C, Berlinsky DL. The use of clove oil, metomidate, tricane methanesulphonate and 2-phenoxyethanol for inducing anaesthesia and their effect on the cortisol stress response in black sea bass (Centropristis striata L). Aquacult Res. 2005;36:1442–9.
Yoshida MA, Nishida K, Mabuchi K. The first record of spawning-season homing of ginbuna crucian carp Carassius sp to a lakeside biotope connected to Lake Biwa confirmed via acoustic telemetry and egg surveys. Ichthyol Res. 2023;70:386–97.
Stuart IG, Jones MJ. Movement of common carp, Cyprinus carpio, in a regulated lowland Australian river: implications for management. Fish Manag Ecol. 2006;13:213–9.
Komeyama K, Mitsunaga Y, Yamane T, Matsuda M. The influence of water temperature on the appearance of common carp Cyprinus carpio around a set-net in the South Basin of Lake Biwa. J Fish Eng. 2007;44:113–8.
Komeyama K, Suzuki K, Takagi T, Mitsunaga Y, Yamane T. Analysis of fish movement using a genetic algorithm: factors influencing the occurrence of fish near a set-net. Fish Manag Ecol. 2008;15:347–55.
Komeyama K, Suzuki K, Torisawa S, Takagi T. Statistical model for the occurrence of common carp at a lakeshore. Math Phys Fish Sci. 2009;7:97–104.
Yoshida MA, Yamamoto D, Sato K. Physostomous channel catfish, Ictalurus punctatus, modify swimming mode and buoyancy based on flow conditions. J Exp Biol. 2017;220:597–606.
Daniel T, Manley J, Trenaman N. The wave glider: enabling a new approach to persistent ocean observation and research. Ocean Dyn. 2011;61:1509–20.
Jaffe JS, Franks PJ, Roberts PL, Mirza D, Schurgers C, Kastner R, Boch A. A swarm of autonomous miniature underwater robot drifters for exploring submesoscale ocean dynamics. Nat Commun. 2017;8:1–8.
Alexander A, Kruusmaa M, Tuhtan JA, Hodson AJ, Schuler TV, Kääb A. Pressure and inertia sensing drifters for glacial hydrology flow path measurements. Cryosphere. 2020;14:1009–23.
Acknowledgements
We are deeply grateful to Mr. Masatomi Matsuoka of the Asahi Fisheries Cooperative Association and Mr. Yuuki Matsushita for providing the studied animals and assisting with the fieldwork. We appreciate Dr. Takehiro Kazama and the Lake Biwa Environmental Research Institute for their cooperation in deploying the drifter from a research vessel. We also thank the fishermen of the Okishima and Sanwa Fisheries Cooperative Association for helping us recover drifters in the field.
Funding
This study was supported by the River Fund of the River Foundation (2018-5211-020, 2019-5211-039) and by Shiga Prefecture, Japan, under the Collaborative Research Fund “Studies on conservation and ecosystem management of Lake Biwa” (OS2019RR2).
Author information
Authors and Affiliations
Contributions
MAY and KM conducted the field study. MAY compiled, analyzed, and interpreted the telemetry data. MAY and KM were major contributors to writing the manuscript. Both the authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
All the experimental procedures were approved by the National Institute for Environmental Studies animal experiment project license (AE-19-35) held by KM and were approved by the Animal Ethics Committee of the National Institute for Environmental Studies. We deployed all acoustic receivers in accordance with relevant legal acts under permission from Shiga Prefecture.
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Additional file 1: Table S1.
Detailed information of fish tagging experiments conducted in 2019–2021.”
Additional file 2:
This file includes six Additional file materials, namely, “Additional file 2: Figure S1: Conceptual figures explaining relationship between detection range of drifter and swimming depth of tagged individuals,” “Additional file 2: Figure S2: Time series of travel speed of the drifter in each trial,” “Additional file 2: Figure S3: Results of the nearshore range tests,” “Additional file 2: Figure S4: Results of the offshore range test,” “Additional file 2: Figure S5. GPS accuracy of the drifter examined using error distances obtained after stranding,” and “Additional file 2: Figure S6. The timing gap between the GPS positioning and signal detection by the drifter.”
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Yoshida, M.A., Mabuchi, K. Using a drifting GPS-Argos satellite buoy as a method for detecting acoustic-tagged fish offshore in an ancient lake. Anim Biotelemetry 11, 30 (2023). https://doi.org/10.1186/s40317-023-00341-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40317-023-00341-2