
Abstract
This work presents an analytical solution of some nonlinear delay differential equations (DDEs) with variable delays. Such DDEs are difficult to treat numerically and cannot be solved by existing general purpose codes. A new method of steps combined with the differential transform method (DTM) is proposed as a powerful tool to solve these DDEs. This method reduces the DDEs to ordinary differential equations that are then solved by the DTM. Furthermore, we show that the solutions can be improved by Laplace–Padé resummation method. Two examples are presented to show the efficiency of the proposed technique. The main advantage of this technique is that it possesses a simple procedure based on a few straight forward steps and can be combined with any analytical method, other than the DTM, like the homotopy perturbation method.
Similar content being viewed by others

Background
Differential equations are relevant tools to model a wide variety of physical phenomena across all areas of applied sciences and engineering. Analytical techniques are applied to find the exact solutions of some cases of differential equations; nevertheless, when the differential equations are nonlinear there are no general techniques of solutions. Therefore, numerical methods are important tools to study and understand the quantitative behavior of the nonlinear differential equations with unknown exact solutions. However, such methods can exhibit numerical instabilities, oscillations or false equilibrium states, among others (Gumel 2002, 2003; de Markus and Mickens 1999). This means that the numerical solution may not correspond to the real solution of the original problem. This situation is further aggravated for some types of differential equations like differential-algebraic equations, fractional differential equations and time delay differential equations (DDEs), among others (Ford and Wulf 2000; Engelborghs et al. 2000; Ascher and Petzold 1998; Campbell et al. 2008; Wanner and Hairer 1998).
Time DDEs appear in propagation and transport phenomena, population dynamics, bioscience problems, neural network model, control problems, electrical networks containing lossless transmission lines and economical systems where decisions and effect are separated by some time intervals, among many other applications (Martín and García 2002a, b; Aiello and Freedman 1990; Gourley and Kuang 2004a, b; Kuang 1993; Li et al. 2006; Li and Jiang 2013; Zhang and Zhang 2013). Given the importance of this kind of equations, some numerical methods have been developed to solve them; among them one can mention: variable multi-step methods (Martín and García 2002a, b), Chebyshev polynomials for pantograph differential equation (Sedaghat et al. 2012), a spectral Galerkin method for nonlinear delay convection-diffusion reaction equations (Liu and Zhang 2015), power series method (Benhammouda et al. 2014a) and the differential transform method (DTM) (Karako and Bereketoglu 2009).
In this work, we propose some case studies of nonlinear DDEs with variable time delays. For such case studies, there are no known numerical methods available. Therefore, we propose a multi-step method with a modified version of the DTM (Zhou 1986; Keskin et al. 2007; Benhammouda et al. 2014b; Benhammouda and Vazquez-Leal 2015; Biazar and Eslami 2010; Chen and Liu 1998; Ayaz 2004; Kangalgil and Ayaz 2009; Kanth and Aruna 2009; Arikoglu and Ozkol 2007; Chang and Chang 2008; Kanth and Aruna 2008; Lal and Ahlawat 2015; Odibat et al. 2010; El-Zahar 2013; Gökdoğan et al. 2012) in order to find the solutions of variable time DDEs.
In the literature, there are some works reporting variable time delays. For instance, Taylor series method is applied to solve time-dependent stochastic DDEs (Milošević and Jovanović 2011). In addition, a study of asymptotic neutral type differential equations with variable time delay is given in Skvortsova (2015). Besides, a study of asymptotic behavior of first order differential equations with variable delay is presented in Dix (2005). In Ding et al. (2010), some new conditions for the boundness and stability by means of the contraction mapping principle are given for nonlinear scalar DDEs with variable delays. The issue of uniqueness of variable DDEs is investigated in Winston (1970), Eloe et al. (2005), Liu and Clements (2002) and Luo et al. (2013). Finally, a research for the existence of attractors for differential equations with a variable delay is presented in Graef and Qian (2000) and Caraballo et al. (2001).
Nonetheless, in the present study, we propose different types of variable delays in terms of algebraic expressions of the time. What is more, given that the approximate solutions of the DTM are power series solutions, we propose to extend the domain of convergence by using a combined scheme of a multi-step technique and the Laplace–Padé resummation method (Vazquez-Leal and Guerrero 2014; Filobello-Nino et al. 2013; Jiao et al. 2002; Sweilam and Khader 2009; Momani et al. 2009; Khan and Faraz 2011; Momani and Ertürk 2008; Tsai and Chen 2010; Ebaid 2011).
This paper is organized as follows: in “Differential transform method” section, we introduce the basic concept of the DTM. Then, in “Multi-step technique and DTM for nonlinear variable DDEs” section, the proposed multi-step technique with the use of the DTM to deal with variable time DDEs is presented. “Padé approximant” and “Laplace–Padé resummation method” sections are devoted to present the basic concepts of Padé and Laplace–Padé resummation methods. In “Case studies” section, the type of delay differential equations with variable delays under study is presented and solved using the proposed technique. Finally, discussion and conclusions are given in “Discussion” and “Conclusions” sections, respectively.
Differential transform method
For convenience of the reader, we will give a review of the differential transform method (DTM) (Zhou 1986; Keskin et al. 2007; Benhammouda et al. 2014b; Benhammouda and Vazquez-Leal 2015; Biazar and Eslami 2010; Chen and Liu 1998; Ayaz 2004; Kangalgil and Ayaz 2009; Kanth and Aruna 2009; Arikoglu and Ozkol 2007; Chang and Chang 2008; Kanth and Aruna 2008; Lal and Ahlawat 2015; Odibat et al. 2010; El-Zahar 2013; Gökdoğan et al. 2012). We will also describe the DTM to solve systems of ordinary differential equations.
Definition 1
(Zhou 1986; Keskin et al. 2007) If a function u(t) is analytical with respect to t in the domain of interest, then
is the transformed function of u(t).
Definition 2
(Zhou 1986; Keskin et al. 2007) The differential inverse transforms of the set \(\left\{ U( k) \right\} _{k=0}^{n}\) is defined by
Substituting (1) into (2), we deduce that
From the above definitions, it is easy to see that the concept of the DTM is obtained from the power series expansion. To illustrate the application of the proposed DTM to solve systems of ordinary differential equations, we consider the nonlinear system
where \(f\left( u(t),t\right) \) is a nonlinear smooth function.
System (4) is supplied with some initial conditions
The DTM establishes that the solution of (4) can be written as
where \(U(0), U(1),U(2),\ldots \) are unknowns to be determined by the DTM.
Applying the DTM to the initial conditions (5) and system (4) respectively, we obtain the transformed initial conditions
and the recursion system
where \(F\left( U(0), \ldots , U( k),k\right) \) is the differential transforms of \(f\left( u(t),t\right) \).
Using (7) and (8), the unknowns \(U(k), k=0,1,2, \ldots \) can be determined. Then, the differential inverse transformation of the set of values \(\left\{ U(k) \right\} _{k=0}^{m}\) gives the approximate solution
where m is the approximation order of the solution. The exact solution of problem (4)–(5) is then given by (6).
If U(k) and V(k) are the differential transforms of u(t) and v(t) respectively, then the main operations of the DTM are shown in Table 1.
The process of the DTM can be described as:
-
1.
Apply the differential transform to the initial conditions (5).
-
2.
Apply the differential transform to the differential system (4) to obtain a recursion system for the unknowns \(U(0), U(1),U(2) \ldots \)
-
3.
Use the transformed initial conditions (7) and the recursion system (8) to determine the unknowns \(U(0),U(1),U(2),\ldots \)
-
4.
Use the differential inverse transform formula (9) to obtain an approximate solution for initial-value problem (4)–(5).
The solutions series obtained from the DTM may have limited regions of convergence. Therefore, we propose to apply the Laplace–Padé resummation method (Vazquez-Leal and Guerrero 2014; Filobello-Nino et al. 2013; Jiao et al. 2002; Sweilam and Khader 2009; Momani et al. 2009; Khan and Faraz 2011; Momani and Ertürk 2008; Tsai and Chen 2010; Ebaid 2011) to the DTM truncated series to enlarge the convergence region as depicted in “Padé approximant” and “Laplace–Padé resummation method” sections.
Multi-step technique and DTM for nonlinear variable DDEs
The type of nonlinear variable delay differential equations (DDEs) which are considered here are given by
where the initial condition \(\phi (t) \) is given and \(\alpha = {\mathop {\mathrm{min}}\nolimits _{t_{0}\le t\le T}}\left( \lambda t^{n}\right) =\lambda t_{0}^{n}, \lambda >0\) and n is a positive integer.
For the nonlinear lag function \(\theta (t) =\lambda t^{n},\) the delay function is \(\tau (t)=t-\lambda t^{n}\) and is such that \(0\le \tau (t)\le t\). The solution of (10)–(11) is assumed to exist, unique and analytical.
To solve (10)–(11), we start by finding the first interval of approximation. This is achieved by solving the inequalities \( \tau (t) \ge t-t_{0}\) and \(t\ge t_{0}\) which lead to the interval \(t_{0}\le t\le t_{1}\), where \(t_{1}=\left( t_{0}/\lambda \right) ^{1/n}.\) Therefore, the first sub-problem to solve is given by
Since \(\lambda t^{n}\in J_{0}\) for \(t\in I_{0},\) then substituting (13) into (12) reduces problem (12)–(13) to the following initial-value problem
where (15) is obtained from (11).
To solve (14)–(15), the differential transform is applied to it to get the recursion
where \(F\left( U_{0}(0), \ldots , U_{0}( k),k\right) \) is the differential transform of \(f(u_{0}(t),\phi (\lambda t^{n}),t)\).
Using (16)–(17), the unknowns \(U_{0}(k)\), for \(k=0,1,2, \ldots \) can be determined. Then, the differential inverse transformation of the set of values \(\left\{ U_{0}(k) \right\} _{k=0}^{m}\) gives the approximate solution
Now if \(t_{1}\ge T\), then the above process is terminated and \(u_{0}(t)\) is the approximate solution. Otherwise, if \(t_{1}<T\), then the inequalities \( \tau (t) \ge t-t_{1}\) and \(t\ge t_{1}\) are solved to get \( t_{2}=\left( t_{1}/\lambda \right) ^{1/n}\). Then, the solution is extended by solving the following sub-problem
Since \(\lambda t^{n}\in J_{1}\) for \(t\in I_{1},\) then substituting (20) into (19) reduces problem (19)–(20) to the following initial-value problem
where (22) is obtained from (20).
To solve (21)–(22), the differential transform is applied to it to get the recursion
where \(F\left( U_{1}(0), \ldots , U_{1}(k),k\right) \) is the differential transforms of \(f\left( u_{1}(t),\phi \left( \lambda t^{n}\right) ,t\right) \).
Using (23)–(24), the unknowns \(U_{1}( k), k=0,1,2, \ldots \) can be determined. Then, the differential inverse transformation of the set of values \(\left\{ U_{1}( k) \right\} _{k=0}^{m}\) gives the approximate solution
Finally, continuing this process, one can extend the domain of the solution to the desired interval.
Padé approximant
Given an analytical function u(t) with Maclaurin’s expansion
The Padé approximant to u(t) of order [L, M] which we denote by \([L/M]_{u}(t) \) is defined by (Baker and Graves-Morris 1996)
where we considered \(q_{0}=1\), and the numerator and denominator have no common factors.
The numerator and the denominator in (27) are constructed so that u(t) and \([L/M]_{u}(t) \) and their derivatives agree at \(t=0\) up to \(L+M\). That is
From (28), we have
From (29), we get the following algebraic linear systems
and
From (30), we calculate first all the coefficients \(q_{n}, 1\le n\le M\). Then, the coefficients \(p_{n}, 0\le n\le L\) are determined from (31).
Note that for a fixed value of \(L+M+1\), the error (28) is smallest when the numerator and denominator of (27) have the same degree or when the numerator has degree one higher than the denominator.
Laplace–Padé resummation method
Several approximate methods provide power series solutions (polynomial). Nevertheless, sometimes, this type of solutions lack large domains of convergence. Therefore, Laplace–Padé resummation method (Vazquez-Leal and Guerrero 2014; Filobello-Nino et al. 2013; Jiao et al. 2002; Sweilam and Khader 2009; Momani et al. 2009; Khan and Faraz 2011; Momani and Ertürk 2008; Tsai and Chen 2010; Ebaid 2011) is used in literature to enlarge the domain of convergence of solutions or inclusive to find the exact solutions.
The Laplace–Padé method can be summarized as follows:
-
1.
First, Laplace transformation is applied to power series (9).
-
2.
Next, s is substituted by 1/t in the resulting equation.
-
3.
After that, the transformed series is convert into a meromorphic function by forming its Padé approximant of order [N/M]. N and M are arbitrarily chosen, but they should be smaller than the order of the power series. In this step, the Padé approximant extends the domain of the truncated series solution to obtain better accuracy and convergence.
-
4.
Then, t is substituted by 1/s.
-
5.
Finally, by using the inverse Laplace s transformation, the exact or an approximate solution is obtained.
Case studies
In this section, we will demonstrate the effectiveness and accuracy of the multi-step technique proposed in “Multi-step technique and DTM for nonlinear variable DDEs” section with the differential transform method (DTM) (Zhou 1986; Keskin et al. 2007; Benhammouda et al. 2014b; Benhammouda and Vazquez-Leal 2015; Biazar and Eslami 2010; Chen and Liu 1998; Ayaz 2004; Kangalgil and Ayaz 2009; Kanth and Aruna 2009; Arikoglu and Ozkol 2007; Chang and Chang 2008; Kanth and Aruna 2008; Lal and Ahlawat 2015; Odibat et al. 2010; El-Zahar 2013; Gökdoğan et al. 2012) through two nonlinear variable delay differential equations (DDEs).
Example 1
Consider the following nonlinear variable delay differential equation
where \(f(t) =e^{-\frac{t^{2}}{4}}-e^{-2t}\) and \(t_{0}=1.\)
For this problem the lag function is \(\theta (t) =t^{2}/4\) and the variable delay is \(\tau (t) =t-t^{2}/4\). Following the procedure described in “Multi-step technique and DTM for nonlinear variable DDEs” section, problem (32)–(33) is solved step by step. The first interval of approximation is determined by solving the inequalities \(\tau (t) \ge t-t_{0}\) and \(t\ge t_{0}\) which lead to the interval \(t_{0}\le t\le t_{1},\) where \( t_{1}=2.\) Therefore, the first sub-problem to solve is given by
Since \(t^{2}/4\in J_{0}\) for \(t\in I_{0},\) then substituting (35) into (34) reduces problem (34)–(35) into the following initial-value problem
where condition (37) is obtained from (33).
To solve (36)–(37), the differential transform is applied to it to obtain the following recursion
From recursion (38)–(39), the following \( U_{0}( k) \) values are obtained
From these values, an eighth-order approximate solution is constructed
where \(\eta _{0}=t-t_{0}.\)
Note that one can use more terms in the above series solutions. Nevertheless, sometimes, this may not increase the accuracy of the solution for large intervals. Therefore, we use the Laplace–Padé resummation method presented in “Laplace–Padé resummation method” section to enlarge the domain of convergence of solutions or to find the exact solutions as follows.
Applying Laplace transform to \(u_{0}(t) \) yields
For simplicity let \(s=1/\eta _{0}\), then
All of the \([L/M] \eta _{0}\)-Padé approximants of (44) with \(L \ge 1\) and \(M \ge 1\) and \(L+M\le 9\) yield
Now since \(\eta _{0}=1/s\), we obtain \(\left[ L/M\right] (t) \) in terms of s as follows
Finally, applying the inverse Laplace transform to (46) gives the following approximate solution
which is the exact solution of delay equation (34)–(35).
In a similar manner, the second interval of approximation is determined. The conditions \(\tau (t) \ge t-t_{1}\) and \(t\ge t_{1}\) yield the interval \(t_{1}\le t\le t_{2}\) where \(t_{2}=2\sqrt{2}.\) Therefore, we consider the sub-problem:
Since \(t^{2}/4\in J_{1}\) for \(t\in I_{1},\) then substituting (49) into (48) reduces problem (48)–(49) to the following initial-value problem
where condition (51) is obtained from (49).
To solve (50)–(51), the differential transform is applied to it to obtain the following recursion
From recursion (52)–(53), the following \( U_{1}( k) \) values are obtained
From these values, an eighth-order approximate solution is constructed
where \(\eta _{1}=t-t_{1}.\)
Applying Laplace transform to \(u_{1}(t) \) yields
For simplicity let \(s=1/\eta _{1}\), then
All of the [L/M] \(\eta _{1}\)-Padé approximants of (58) with L \(\ge 1\) and M \(\ge 1\) and \(L+M\le 9\) yield
Now since \(\eta _{1}=1/s\), we obtain \(\left[ L/M\right] (t) \) in terms of s as follows
Finally, applying the inverse Laplace transform to (60) gives the following approximate solution
which is the exact solution of delay equation (48)–(49).
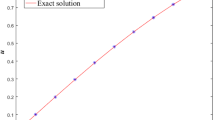
Finally, combining (47) and (61), the exact solution \(u(t) =e^{-t}, 1/4\le t\le 2\sqrt{2}\) for the nonlinear variable delay problem (32)–(33) is obtained.
Example 2
Consider the following nonlinear variable delay differential equation
where \(g(t) =\sin t-\sin ^{2}t+\sin \left( t^{3}/8\right) \) and \( t_{0}=1/8.\)
For this problem the lag function is \(\theta (t) =t^{3}/8\) and the delay is \(\tau (t) =t-t^{3}/8.\) As for example 1, problem (62)–(63) is solved step by step. The first interval of approximation is determined by solving the inequalities \(\tau (t) \ge t-t_{0}\) and \(t\ge t_{0}\) which lead to the interval \( t_{0}\le t\le t_{1},\) where \(t_{1}=1.\) Thus, the first sub-problem to solve is given by:
Since \(t^{3}/8\in J_{0}\) for \(t\in I_{0},\) then substituting (65) into (64) reduces problem (64)–(65) to the following initial-value problem
where conditions (67) are obtained from (63).
To solve (66)–(67), the differential transform is applied to it to obtain the following recursion
where \(k=0,1,2,\ldots \) and \(U_{0}(0) =\sin t_{0}, \quad U_{0}(1) =\cos t_{0}\) and where \(S( k) =\left( 1/k!\right) \sin (t_{0}+k\pi /2)\) represents the differential transform of \( \sin t\) at \(t_{0}.\)
From recursion (68), the following \(U_{0}( k) \) values are obtained
From these values, an eighth-order approximate solution is constructed
where \(\eta _{0}=t-t_{0}.\)
To enlarge the domain of convergence of the approximate solution or to find the exact solution, the Laplace–Padé resummation method is used as in the previous example.
Applying Laplace transform to \(u_{0}(t) \) yields
For simplicity let \(s=1/\eta _{0}\), then
All of the \([L/M] \eta _{0}\)-Padé approximants of (73) with \(L \ge 1\) and \(M \ge 1\) and \(L+M\le 9\) yield
Now since \(\eta _{0}=1/s\), we obtain \(\left[ L/M\right] (t) \) in terms of s as follows
Finally, applying the inverse Laplace transform to (75) gives the following approximate solution
Thus, the exact solution of the nonlinear variable delay equation (64)–(65) is \(u_{0}(t) =\sin t, t_{0}\le t\le 1\).
In a similar manner, the second interval of approximation is determined. This interval is obtained by solving the inequalities \(\tau (t) \ge t-t_{1}\) and \(t\ge t_{1}\) which lead to the interval \(t_{1}\le t\le t_{2}\), where \(t_{2}=2.\) Thus, the second sub-problem to solve is given by:
Since \(t^{3}/8\in J_{1}\) for \(t\in I_{1},\) then substituting (78) into (77) reduces problem (77)–(78) to the following initial-value problem
where conditions (80) are obtained from (78).
To solve (79)–(80), the differential transform is applied to it to obtain the following recursion
where \(k=0,1,2,\ldots \) and \(U_{1}(0) =\sin t_{1}, U_{1}(1) =\cos t_{1}\) and where \(S( k) =\left( 1/k!\right) \sin (t_{1}+k\pi /2)\) represents the differential transform of \( \sin t\) at \(t_{1}.\)
From recursion (81), the following \(U_{1}( k) \) values are obtained
From these values, an eighth-order approximate solution is constructed
where \(\eta _{1}=t-t_{1}.\)
Applying Laplace transform to \(u_{1}(t) \) yields
For simplicity let \(s=1/\eta _{1}\), then
All of the \([L/M] \eta _{1}\)-Padé approximants of (86) with \(L \ge 1\) and \(M \ge 1\) and \(L+M\le 9\) yield
Now since \(\eta _{1}=1/s\), we obtain \(\left[ L/M\right] (t) \) in terms of s as follows
Finally, applying the inverse Laplace transform to (88) gives the following approximate solution
Thus, the exact solution of the nonlinear variable delay equation (77)–(78) is \(u_{1}(t) =\sin t, t_{0}\le t\le 2.\)
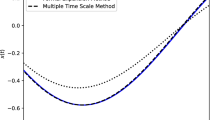
Finally, combining (76) and (89), the exact solution \(u(t) =\sin t,\quad 8^{-4}\le t\le 2\) of the nonlinear variable delay problem (62)–(63) is obtained.
Discussion
Variable delays differential equations (DDEs) with arbitrary types of nonlinear functions for the time delay is an open area of research that require new numerical and analytical methods in order to deal with their solution. Therefore, from the examples above, it is worthwhile to remark that the multi-step technique proposed in this work combined with modified differential transform method (DTM) (Zhou 1986; Keskin et al. 2007; Benhammouda et al. 2014b; Benhammouda and Vazquez-Leal 2015; Biazar and Eslami 2010; Chen and Liu 1998; Ayaz 2004; Kangalgil and Ayaz 2009; Kanth and Aruna 2009; Arikoglu and Ozkol 2007; Chang and Chang 2008; Kanth and Aruna 2008; Lal and Ahlawat 2015; Odibat et al. 2010; El-Zahar 2013; Gökdoğan et al. 2012) based on Laplace–Padé resummation method (Vazquez-Leal and Guerrero 2014; Filobello-Nino et al. 2013; Jiao et al. 2002; Sweilam and Khader 2009; Momani et al. 2009; Khan and Faraz 2011; Momani and Ertürk 2008; Tsai and Chen 2010; Ebaid 2011) was able to obtain the exact solutions of nonlinear DDEs with variable delays. It is important to highlight that this multi-step technique was able to obtain the exact solutions for both case studies within the given intervals. The straight forward procedure was able to deal with different algebraic time delays as quadratic and cubic term highlighting the malleability of the technique presented to solve nonlinear DDEs with variable delays.
As far as the knowledge of authors goes, no numerical or analytical approximation methods to solve the type of case studies of this work have been reported in the literature. Hence, we propose as a proof of concept, to solve problems with known exact solutions. Therefore, this multi-step technique in combination with the DTM and Laplace–Padé resummation was able to obtain the exact solutions within the given intervals. However, it is still pending for future work in order to treat DDEs with unknown exact solutions. For such hard to solve problems, we will measure the error of approximation using the mean square residual (MSR) error as in Benhammouda and Vazquez-Leal (2015). Finally, further research is required to extend this proposed methodology to other delay functions and systems of DDEs, delay differential-algebraic equations and delay partial differential equations with variable time delays.
Conclusions
This article deals with the solution of nonlinear DDEs with variable delays using a new multi-step method and the DTM (Zhou 1986; Keskin et al. 2007; Benhammouda et al. 2014b; Benhammouda and Vazquez-Leal 2015; Biazar and Eslami 2010; Chen and Liu 1998; Ayaz 2004; Kangalgil and Ayaz 2009; Kanth and Aruna 2009; Arikoglu and Ozkol 2007; Chang and Chang 2008; Kanth and Aruna 2008; Lal and Ahlawat 2015; Odibat et al. 2010; El-Zahar 2013; Gökdoğan et al. 2012). This technique was tested on two nonlinear problems. The results obtained show that the technique can be applied to solve these types of equations efficiently obtaining the exact solution. On the one hand, it is important to highlight that this kind of variable delay present series issues for traditional numerical and analytical methods, and on the other, the DTM in combination with Laplace–Padé resummation method (Vazquez-Leal and Guerrero 2014; Filobello-Nino et al. 2013; Jiao et al. 2002; Sweilam and Khader 2009; Momani et al. 2009; Khan and Faraz 2011; Momani and Ertürk 2008; Tsai and Chen 2010; Ebaid 2011) was able to obtain the exact solutions of nonlinear DDEs with variable delays. Future work is necessary to involve into the application of the proposed methodology for the solution of nonlinear DDEs with variable delays and unknown exact solutions. Other types of problems, like delay differential-algebraic equations and delay partial differential equations with variable time delays, will also be considered.
References
Aiello WG, Freedman H (1990) A time-delay model of single-species growth with stage structure. Math Biosci 101(2):139–153
Arikoglu A, Ozkol I (2007) Solution of fractional differential equations by using differential transform method. Chaos Solitons Fractals 34(5):1473–1481
Ascher UM, Petzold LR (1998) Computer methods for ordinary differential equations and differential-algebraic equations. Society for Industrial and Applied Mathematics (SIAM), Philadelphia
Ayaz F (2004) Applications of differential transform method to differential-algebraic equations. Appl Math Comput 152(3):649–657. doi:10.1016/S0096-3003(03)00581-2
Baker GA, Graves-Morris PR (1996) Padé approximants, encyclopaedia of mathematics and its applications, vol 59. Cambridge University Press, Cambridge
Benhammouda B, Vazquez-Leal H (2015) Analytical solution of a nonlinear index-three DAES system modelling a slider-crank mechanism. Discrete Dyn Nat Soc. doi:10.1155/2015/206473
Benhammouda B, Vazquez-Leal H, Hernandez-Martinez L (2014a) Procedure for exact solutions of nonlinear pantograph delay differential equations. Br J Math Comput Sci 4(19):2738–2751
Benhammouda B, Vazquez-Leal H, Hernandez-Martinez L (2014b) Modified differential transform method for solving the model of pollution for a system of lakes. Discrete Dyn Nat Soc. doi:10.1155/2014/645726
Biazar J, Eslami M (2010) Differential transform method for quadratic Riccati differential equation. Int J Nonlinear Sci 9(4):444–447
Campbell SL, Linh VH, Petzold LR (2008) Differential-algebraic equations. Scholarpedia 3(8):2849
Caraballo T, Langa JA, Robinson JC (2001) Attractors for differential equations with variable delays. J Math Anal Appl 260(2):421–438
Chang S-H, Chang I-L (2008) A new algorithm for calculating one-dimensional differential transform of nonlinear functions. Appl Math Comput 195(2):799–808
Chen CL, Liu YC (1998) Solution of two-point boundary-value problems using the differential transformation method. J Optim Theory Appl 99(1):23–35. doi:10.1023/A:1021791909142
de Markus AS, Mickens RE (1999) Suppression of numerically induced chaos with nonstandard finite difference schemes. J Comput Appl Math 106(2):317–324. doi:10.1016/S0377-0427(99)00076-X
Ding L, Li X, Li Z (2010) Fixed points and stability in nonlinear equations with variable delays. Fixed Point Theory Appl 1:195–916
Dix J (2005) Asymptotic behavior of solutions to a first-order differential equation with variable delays. Comput Math Appl 50(10):1791–1800
Ebaid AE (2011) A reliable aftertreatment for improving the differential transformation method and its application to nonlinear oscillators with fractional nonlinearities. Commun Nonlinear Sci Numer Simul 16(1):528–536. doi:10.1016/j.cnsns.2010.03.012
El-Zahar ER (2013) Approximate analytical solutions of singularly perturbed fourth order boundary value problems using differential transform method. J King Saud Univ Sci 25(3):257–265
Eloe PW, Raffoul YN, Tisdell CC (2005) Existence, uniqueness and constructive results for delay differential equations. Electron J Differ Equ 121:1–11
Engelborghs K, Luzyanina T, Roose D (2000) Numerical bifurcation analysis of delay differential equations. J Comput Appl Math 125(1–2):265–275. doi:10.1016/S0377-0427(00)00472-6
Filobello-Nino U, Vazquez-Leal H, Khan Y, Yildirim A, Jimenez-Fernandez VM, Herrera-May AL, Castaneda-Sheissa R, Cervantes-Perez J (2013) Using perturbation methods and Laplace–Padé approximation to solve nonlinear problems. Miskolc Math Notes 14(1):89–101
Ford NJ, Wulf V (2000) How do numerical methods perform for delay differential equations undergoing a hopf bifurcation? J Comput Appl Math 125(1–2):277–285. doi:10.1016/S0377-0427(00)00473-8
Gourley AS, Kuang Y (2004a) A stage structured predator–prey model and its dependence on maturation delay and death rate. J Math Biol 49(2):188–200. doi:10.1007/s00285-004-0278-2
Gourley SA, Kuang Y (2004b) A delay reaction–diffusion model of the spread of bacteriophage infection. SIAM J Appl Math 65(2):550–566
Graef J, Qian C (2000) Global attractivity in differential equations with variable delays. J Aust Math Soc Ser B Appl Math 41(04):568–579
Gumel A (2002) Removal of contrived chaos in finite-difference methods. Int J Comput Math 79(9):1033–1041
Gumel AB (2003) Preface. J Differ Equ Appl 9(11):989–990. doi:10.1080/1023619031000146968
Gökdoğan A, Merdan M, Yildirim A (2012) The modified algorithm for the differential transform method to solution of Genesio systems. Commun Nonlinear Sci Numer Simul 17(1):45–51
Jiao YC, Yamamoto Y, Dang C, Hao Y (2002) An aftertreatment technique for improving the accuracy of Adomian’s decomposition method. Comput Math Appl 43(6):783–798. doi:10.1016/S0898-1221(01)00321-2
Kangalgil F, Ayaz F (2009) Solitary wave solutions for the KdV and mKdV equations by differential transform method. Chaos Solitons Fractals 41(1):464–472
Kanth ASVR, Aruna K (2008) Solution of singular two-point boundary value problems using differential transformation method. Phys Lett A 372(26):4671–4673. doi:10.1016/j.physleta.2008.05.019
Kanth AR, Aruna K (2009) Two-dimensional differential transform method for solving linear and non-linear Schrödinger equations. Chaos Solitons Fractals 41(5):2277–2281
Karako F, Bereketoglu H (2009) Solution of delay differential equations by the differential transform. Int J Comput Math 86(5):914–923
Keskin Y, Kurnaz A, Kiris M, Oturanc G (2007) Approximate solutions of generalized pantograph equations by the differential transform method. Int J Nonlinear Sci Numer Simul 8(2):159–164
Khan Y, Faraz N (2011) Application of modified Laplace decomposition method for solving boundary layer equation. J King Saud Univ Sci 23(1):115–119. doi:10.1016/j.jksus.2010.06.018
Kuang Y (1993) Delay differential equations: with applications in population dynamics. Academic Press, Boston
Lal R, Ahlawat N (2015) Axisymmetric vibrations and buckling analysis of functionally graded circular plates via differential transform method. Eur J Mech A Solids 52:85–94
Li Y, Jiang W (2013) Nonlinear waves in complex oscillator network with delay. Commun Nonlinear Sci Numer Simul 18(11):3226–3237. doi:10.1016/j.cnsns.2013.04.010
Li J, Kuang Y, Mason CC (2006) Modeling the glucose–insulin regulatory system and ultradian insulin secretory oscillations with two explicit time delays. J Theor Biol 242(3):722–735
Liu W, Clements JC (2002) On solutions of evolution equations with proportional time delay. Int J Differ Equ Appl 4:229–254
Liu B, Zhang C (2015) A spectral galerkin method for nonlinear delay convection–diffusion–reaction equations. Comput Math Appl 69(8):709–724
Luo Z, Huang J, Luo L, Dai B (2013) Existence and uniqueness of positive (almost) periodic solutions for a neutral multi-species logarithmic population model with multiple delays and impulses. Open J Appl Sci 3(2):247–262. doi:10.4236/ojapps.2013.32032
Martín J, García O (2002a) Variable multistep methods for higher-order delay differential equations. Math Comput Model 36(7):805–820
Martín J, García O (2002b) Variable multistep methods for delay differential equations. Math Comput Model 35(3):241–257
Milošević M, Jovanović M (2011) An application of taylor series in the approximation of solutions to stochastic differential equations with time-dependent delay. J Comput Appl Math 235(15):4439–4451
Momani S, Erjaee GH, Alnasr MH (2009) The modified homotopy perturbation method for solving strongly nonlinear oscillators. Comput Math Appl 58(11–12):2209–2220. doi:10.1016/j.camwa.2009.03.082
Momani S, Ertürk VS (2008) Solutions of non-linear oscillators by the modified differential transform method. Comput Math Appl 55(4):833–842. doi:10.1016/j.camwa.2007.05.009
Odibat ZM, Bertelle C, Aziz-Alaoui M, Duchamp GH (2010) A multi-step differential transform method and application to non-chaotic or chaotic systems. Comput Math Appl 59(4):1462–1472
Sedaghat S, Ordokhani Y, Dehghan M (2012) Numerical solution of the delay differential equations of pantograph type via Chebyshev polynomials. Commun Nonlinear Sci Numer Simul 17(12):4815–4830
Skvortsova M (2015) Asymptotic properties of solutions to systems of neutral type differential equations with variable delay. J Math Sci 205(3):455–463
Sweilam NH, Khader MM (2009) Exact solutions of some coupled nonlinear partial differential equations using the homotopy perturbation method. Comput Math Appl 58(11–12):2134–2141. doi:10.1016/j.camwa.2009.03.059
Tsai P-Y, Chen C-K (2010) An approximate analytic solution of the nonlinear Riccati differential equation. J Frankl Inst 347(10):1850–1862. doi:10.1016/j.jfranklin.2010.10.005
Vazquez-Leal H, Guerrero F (2014) Application of series method with Padé and Laplace–Padé resummation methods to solve a model for the evolution of smoking habit in Spain. Comput Appl Math 33(1):181–192. doi:10.1007/s40314-013-0054-2
Wanner G, Hairer E (1998) Solving ordinary differential equations II, stiff and differential-algebraic problems, Springer Series in Computational Mathematics, vol 14, 2nd edn. Springer, Berlin
Winston E (1970) Uniqueness of the zero solution for delay differential equations with state dependence. J Differ Equ 7(2):395–405
Zhang F, Zhang Y (2013) State estimation of neural networks with both time-varying delays and norm-bounded parameter uncertainties via a delay decomposition approach. Commun Nonlinear Sci Numer Simul 18(12):3517–3529. doi:10.1016/j.cnsns.2013.05.004
Zhou JK (1986) Differential transformation and its applications for electrical circuits. Huarjung University Press, Wuuhahn
Authors' contributions
All authors contributed extensively in the development and completion of this article. All authors read and approved the final manuscript.
Acknowledgements
The second author gratefully acknowledges the financial support of the National Council for Science and Technology of Mexico (CONACyT) through Grant CB-2010-01 #157024.
Competing interests
The authors declare that they have no competing interests.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Benhammouda, B., Vazquez-Leal, H. A new multi-step technique with differential transform method for analytical solution of some nonlinear variable delay differential equations. SpringerPlus 5, 1723 (2016). https://doi.org/10.1186/s40064-016-3386-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40064-016-3386-8