
Abstract
In this article, we define the new concept of a fixed set for a set valued map with set valued domain in the setting of metric space endowed with a directed graph. This notion of fixed set is analogous to the notion of a fixed point for a multivalued map and not for a classical single-valued map. We also introduce the new concept of the start set of a graph whose vertices are closed and bounded subsets of a metric space. Characterizations for such a graph to have a start set are given. Further, the notion of a self-path set valued map is defined and its relation with the start set is established. Finally, the existence of fixed sets is established in this context.
Similar content being viewed by others


1 Introduction
The Banach contraction principle initiated a new era of research in fixed point theory due to its immense applicability in major areas of mathematics like numerical analysis and differential/integral equations. Boyd and Wong [1] used this principle to investigate the fixed point results of nonlinear contraction maps.
The study of the existence of fixed points in partially ordered sets is interesting due to its applicability in finding new convergence schemes. This was first studied by Ran and Reurings [2] combining the Banach contraction principle and the Knaster-Tarski fixed point theorem. Ran and Reurings considered a class of mappings \(f:X\rightarrow X\), with \((X,d)\) as a complete metric space and a partial order ≤. The mappings they considered were continuous, monotone with respect to the partial order ≤. Those mappings also satisfy a Banach contraction inequality for every pair \((x,y)\in X\times X\) such that \(x\leq y\). When, for some \(x_{0}\in X\), the inequality \(x_{0}\leq f(x_{0})\) is satisfied, they proved that the Picard sequence \(\{f^{n}(x_{0})\}\) would converge to a fixed point of f. Ran and Reurings also combined this interesting result with the Schauder fixed point theorem and applied it to obtain some existence and uniqueness results to nonlinear matrix equations.
Neito and Rodríguez-López [3, 4] extended the results of Ran and Reurings to functions which were not necessarily continuous. The authors also applied their results to obtain a theorem on the existence of a unique solution for periodic boundary problems relative to ordinary differential equations.
Some important work in this direction that deserves attention is [5–20].
Nadler [21] and Assad and Kirk [22] established some interesting fixed point results for set valued and multivalued contraction mappings. Meanwhile, Espinola and Kirk [23] combined the concepts of fixed point theory and graph theory to prove fixed point results in R-trees. In 2008, Jachymski [24] introduced the interesting idea of using the language of graph theory in the study of fixed points. He was interested in establishing results those would eventually generalize the existing results and also apply the results to the theory of linear operators. So, he studied the class of generalized Banach contractions on a metric space with a directed graph. The advantage of using graph theoretical concepts was that it helped him to describe the results in a unified way and also weaken some conditions significantly. Such work was further extended by Bojor [25, 26]. Very recently, some fixed point results on subgraphs of directed graphs were established by Aleomraninejad, Rezapour and Shahzad [6, 27]. They showed that the Caristi fixed point theorem and a version of Knaster-Tarski fixed point theorem were special cases of their results.
Some influential work on the same subject, which we must take into account, is [28–37].
In the present paper, our goal is to consider the mapping \(T : CB(X)\rightarrow CB(X)\) instead of \(T : X\rightarrow X\) or \(T : X \rightarrow CB(X)\) to study fixed point results of set valued mappings. The current corresponding author [11] generalized some results of Jachymski [24] by considering maps of the type \(T:CB(X)\rightarrow CB(X)\), i.e., set valued contraction maps with set valued domain. In a similar setting, recently, more fixed point results were investigated by Abbas et al. [38, 39]. In the current paper, we introduce the new concept of fixed set which is analogous to the concept of fixed point for a multivalued map. We establish some existence results for fixed sets by defining another concept called the start set of a graph whose vertices are closed and bounded subsets of a metric space. Our results generalize and extend some existing results in the literature, especially those of [27].
Let \((X,d)\) be a complete metric space and \(CB(X)\) be the class of all non-empty closed and bounded subsets of X. For \(A,B\in CB(X)\), let
where \(d(a,B)=\inf_{b\in B} d(a,b)\). Then \((CB(X),H)\) is a metric space and H is said to be the Pompeiu-Hausdorff metric induced by d.
Let \((X,d)\) be a metric space and \(\Delta=\{(x,x):x\in X\}\) denote the diagonal of the Cartesian product \(X\times X\). Consider a directed graph G such that the set of its vertices coincides with X (i.e., \(V(G)=X\)) and the set of its edges \(E(G)\) is such that \(\Delta \subseteq E(G)\), i.e., G contains all the loops. We assume G has no parallel edges and thus we identify G with the pair \((V(G),E(G))\).
If \(x,y\in V(G)\), then a path in G from x to y is a sequence \(\{ x_{i}\}^{n}_{i=0}\) of vertices such that \(x_{0}=x\), \(x_{n}=y\) and \((x_{i-1},x_{i})\in E(G)\) for \(i=1,2,\ldots,n\). A closed path with at least three distinct vertices is called a cycle.
We assume that a path may be finite or infinite and a cycle may be considered as a finite path. Also we assume that G has no isolated vertex, i.e., a vertex with which no edge is incident. A subgraph of G is a graph having all its vertices and edges in G.
2 Main results
Throughout, by a graph G we mean a directed graph defined via the vertices \(V(G)=CB(X)\) and edges \(E(G)=\{(A,B): A,B\in CB(X) \text{ and there is an edge for some } a\in A \mbox{ to } b\in B\}\), unless otherwise specified.
In the study of mappings of the form \(T : CB(X) \rightarrow CB(X)\), there can be two approaches: (i) equip \(CB(X)\) with a graph; (ii) first equip X with a graph and then consider the induced graph structure on \(CB(X)\).
In the present study we have adopted the second approach. The following definitions will be useful in this context.
Definition 2.1
[11]
Let A and B be two non-empty subsets of X. Then by the statement ‘there is an edge between A and B’, we mean there is an edge between some \(a \in A\) and \(b \in B\) and we write it as \(A\hookrightarrow B\). Also, by ‘there is a path between A and B’ we mean that there is a path between some \(a \in A\) and \(b \in B\) and we write it as \(A\hookrightarrow_{p} B\)
Definition 2.2
Let \(CB(X)\) be the class of all non-empty closed and bounded subsets of X. For each \(A\in CB(X)\), the notation \([A]_{G}\) denotes a class of non-empty closed and bounded subsets of X such that \([A]_{G} =\{ B \in CB(X): B\hookrightarrow_{p} A\}\).
Definition 2.3
The set valued map \(T : CB(X) \rightarrow CB(X)\) is a self-path map whenever, for each \(A\in CB(X)\), there is a path from u to v for some \(u \in T(A)\) and \(v \in A\), we denote this by \(A \in[T(A)]_{G}\).
When \(A\neq B\), by the notation \(A\in[T(B)]_{G}\) we mean that there is a path from x to y for some \(x\in A\) and \(y \in T(B)\).
Also, we define \([B]_{G^{l}}\) as
Remark 2.4
Next we define the most important concept of this paper which is the notion of a fixed set. Inspired by the definition of a fixed point in multivalued case, we define the analogous concept of fixed set in the current paper. The main motivation for not considering the single-valued analog of a fixed point is that by considering the multivalued analog we can generalize and extend much celebrated work such as that of Nadler [21] and Asad and Kirk [22] in the context of mappings of the type \(T:CB(X)\rightarrow CB(X)\).
Definition 2.5
We say that \(A\in CB(X)\) is a fixed set of the set valued map \(T : CB(X) \rightarrow CB(X)\) if \(A\subseteq T(A)\).
Remark 2.6
Clearly the empty set is always a fixed set. Hence, in the rest of the paper, by a fixed set we mean a non-empty set.
The next example motivates the study of multivalued mappings by showing that control problems may be translated in terms of multivalued maps and, hence, a study of their fixed points could provide new solution schemes to such problems.
Example 2.7
Suppose that the following control problem is to be solved:
which is controlled by parameters \(u(t)\) (called the controls), where \(f:[0,a]\times\mathbb{R}^{n} \times\mathbb{R}^{m}\longrightarrow \mathbb{R}^{n}\).
To solve the above problem we define a multivalued map \(F:[0,a]\times \mathbb{R}^{n}\rightarrow\mathbb{R}^{n}\) as follows:
Then solutions of the above problem are solutions of the following differential inclusions:
Definition 2.8
Let \(G^{\prime}\) be a subgraph of the directed graph G. We say that \(M \in CB(X)\) is a lower bound for \(G^{\prime}\) whenever \(A \in[M]_{G^{l}}\) for all \(A \in CB(V(G^{\prime}))\). Also, we say that \(N \in CB(X)\) is an infimum of \(G^{\prime}\) whenever N is a lower bound of \(G^{\prime}\) and \(N \in [M]_{G^{l}}\) for all lower bounds M.
Definition 2.9
Let G be a directed graph defined via the vertices \(V(G)=CB(X)\) and \(D \in CB(X)\). We say that D is a start set of G whenever there is no \(u\in D\) and \(x \in X\) with \(x \neq u\) such that there is a path from x to u.
Remark 2.10
If \(A\in CB(X)\) is a start set of a graph G defined via the vertices \(V(G)=CB(X)\) then, obviously, for any \(a\in A\), \(\{a\}\) is also a start set of G.
Definition 2.11
Let H be a subgraph of the directed graph G defined via the vertices \(V(G)=CB(X)\). We say that \(S \in V(H)\) is a start set of H if there is no \(U \in V(H)\) such that there is a path from u to s for some \(u\in U\) and \(s\in S\) with \(u\neq s\).
Definition 2.12
Let \((X,d)\) be a metric space and \(\phi: CB(X) \rightarrow(-\infty, \infty)\) a map. Suppose that G is the directed graph defined by \(V(G)=CB(X)\) and \(E(G)= \{(A, B): H(A, B) \leq\phi(A) - \phi(B)\}\). We say that ϕ is upper semi-continuous whenever \(\phi(A_{n}) \leq \phi(A)\) for all sequences \(\{A_{n}\}\) in \(CB(X)\) such that \(\{A_{n}\}\) converges to A as \(n \rightarrow\infty\) for some \(A \in CB(X)\) (here the convergence is defined with respect to the Pompeiu-Hausdorff metric H).
Our first result uses the concept of a minimal path. If Z denotes the set of all paths with at least two edges in a directed graph G, then \((Z,\subseteq)\) is a partially ordered set. Also since it is trivially true that every partially ordered set has a minimal element, we can conclude that G has a minimal path.
Definition 2.13
A directed graph G where \(V(G)=CB(X)\) is said to have the lower bound property if every minimal path P in G has a lower bound \(M\in CB(X)\) such that \(M\in V(P)\), i.e., the lower bound of P lies in P itself.
Theorem 2.14
Let G be a directed graph defined via the vertices \(V(G)=CB(X)\) and having the lower bound property. Then a minimal path in G, considered as a subgraph of G, has a start set or a cycle.
Proof
Let us assume that G has no cycle. Let B be a minimal path in G and \(L \subset B\) be a lower bound of B. If L is not a start set, there exists \(U\in V(L)\) and \(V \in V(G)\) such that \(U \neq V\) and there is a path from V to U. Then \(B \setminus\{U\}\) is a path in G and \(B \setminus\{U\} \subset B\). This contradicts the fact that B is a minimal path. Hence L must be a start set of B. □
Below we give an example to verify Theorem 2.14.
Example 2.15
Let \(X = \{x_{1}, x_{2}, x_{3},\ldots\}\) and G be a directed graph defined via the vertices \(V(G)=CB(X)\). Consider the closed and bounded subsets of X as \(A =\{x_{1}\}, B = \{x_{3}, x_{5}, x_{6}\}, C = \{ x_{7}\}, D = \{x_{2}, x_{9}\}\) and \(E = \{x_{4}, x_{8}\}\). Also suppose that H is a subgraph of G with vertices \(V(H)=\{A,B,C,D,E\}\) and edges \(E(H) = \{(A, B), (B, C), (E, C), (D, E)\}\). Then it is easy to see that H has no cycle and has the lower bound property. Here \(A\rightarrow B\rightarrow C\) is a minimal path in H, which has a start set A.
Theorem 2.16
Let G be a directed graph defined via the vertices \(V(G)=CB(X)\). Then G has a start set if and only if each self-path map on G has a fixed set.
Proof
Let A be a start set of the directed graph G and \(T : CB(X) \rightarrow CB(X)\) be a self-path map on G. We claim that A is a fixed set of T. For any \(a\in A\), since \(\{a\} \in[T(a)]_{G}\), there is a path (finite or infinite) from u to a for some \(u \in T(a)\). But since \(\{a\}\) is a start set (as per Remark 2.10), this is not possible for any \(u \in T(a)\) unless \(u=a\). Thus, we must have \(a\in T(a)\) and consequently \(A\subseteq T(A)\) i.e., A is a fixed set of T.
Again, suppose that G is a directed graph and each self-path map on G has a fixed set. If possible assume that G has no start set. Then, for each \(A\in CB(X)\) and \(x\in A\), there exists \(y\in V(G)\) such that \(x\neq y\) and there is a path from y to x. Now, considering every such pair \((y,x)\), for each \(A\in CB(X)\), we can define a map \(T :CB(X)\rightarrow CB(X)\) such that \((T(A), A) \subset E(G)\). It is, however, easy to see that T is a self-path map because \(A \in [T(A)]_{G}, \text{ for all } A\in CB(X)\), but T has no fixed set as \(A \nsubseteq T(A)\) for any \(A\in CB(X)\). This contradicts our hypothesis and thus G must have a start set. □
Our next example shows that indeed if a directed graph has no start set, then a self-path map may be defined which has no fixed set.
Example 2.17
Let \(X = \{1, 2,\ldots,13\}\). We consider some closed and bounded subsets of X as \(A =\{1\}, B = \{2, 4\}, C = \{6, 8, 10\}, D = \{5, 7, 11, 13\}\) and \(E = \{3, 6, 9,12\}\). Let G be a directed graph with vertices \(V (G) = P(X)\) (the power set of X), and let H be a subgraph of G with vertices \(V(H)=\{A,B,C,D,E\}\) and edges \(E(H) = \{(A, B), (B, C), (C, D), (D, B),(D, E),(E, A)\}\). Define the map \(T: V(H)\rightarrow V(H)\) such that \(T(A) = E, T(B) = C, T(C) = B, T(D) = A, T(E) = D\). Then it is easy to see that T is a self-path map but G has no fixed set and no start set either.
Theorem 2.18
Let G be a directed graph defined via the vertices \(V(G)=CB(X)\) such that every path in G has an infimum within itself and \(T:CB(X)\rightarrow CB(X)\) be a self-path map on G. Also, let \(G^{\prime}= \{U\in CB(X) : U\in[T(U)]_{G}\}\) and \(G^{\prime}\) has no cycle. Then T has a fixed set in \(G^{\prime}\).
Proof
Let B be a path in \(G^{\prime}\) and \(D\in CB(X)\) be its infimum (greatest lower bound). Therefore, from the definition of self-path map, we have \(D\in[T(D)]_{G}\), which implies that \(D\in G^{\prime}\). Also, \(G^{\prime}\) is a subgraph of G. Now, using Theorem 2.14, \(G^{\prime}\) has a start set. Again, since T may be considered as a self-path map on \(G^{\prime}\), using Theorem 2.16 we can conclude that T has a fixed set in \(G^{\prime}\). □
Lemma 2.19
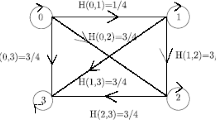
Let X be a complete metric space and \(\phi:CB(X) \rightarrow(-\infty , \infty)\) a map bounded from above. Suppose that G is the directed graph defined by \(V(G) = CB(X)\) and \(E(G)=\{(A, B):H(A, B) \leq\phi (A) - \phi(B)\}\). If ϕ is upper semi-continuous, then G has a start set.
Proof
First we prove that G has no cycle. If G has a cycle, then there exist a finite path \(\{\lambda_{i}\}_{i=1}^{n}\) for some \(\lambda_{i}\in A_{i}\) where each \(A_{i} \in CB(X)\) such that \(\lambda_{1} = \lambda_{n} \) (for in a cycle initial and terminal vertices are the same).
Now, for \(\lambda_{1} \in A_{1}\) and \({\lambda_{i}\in A_{i}}, i\geq2\), we have \(H(A_{i}, A_{1}) \leq\phi(A_{i}) - \phi(A_{1})\) and also \(H(A_{i}, A_{1}) \leq\phi(A_{1}) - \phi(A_{i}) = -[\phi(A_{i}) - \phi(A_{1})]\). But this is possible only when \(\phi(A_{i}) = \phi(A_{1})\), i.e., \(H(A_{i}, A_{1}) \leq0 \). This implies that \(A_{i} = A_{1} \text{ for all } i \geq2\), which is a contradiction. Thus, G cannot have any cycle.
Next we show that each path in G has a lower bound. Let \(\{A_{\lambda}\} _{\lambda\in\Lambda}\) be a path in G. As ϕ is bounded from above, we can obtain a decreasing sequence \(\{\lambda_{n}\}_{n \geq1}\) such that \(\lim_{n\rightarrow\infty} \phi(A_{\lambda_{n}}) = \sup_{\lambda\in\Lambda} \phi(A_{\lambda})\).
Now,
Therefore, we see that \(\{A_{\lambda_{n}}\}_{n \geq1}\) is a Cauchy sequence in \(CB(X)\). Since \((CB(X), H)\) is complete, we have \(\{ A_{\lambda_{n}}\}\) must converge to some \(A \in CB(X)\). As ϕ is upper semi-continuous, we now have \(\phi(A_{\lambda_{n}}) \leq\phi(A)\) \(\Rightarrow0 \leq\phi(A) - \phi(A_{\lambda_{n}})\) i.e., \(H(A, A_{\lambda_{n}}) \leq\phi(A) - \phi(A_{\lambda_{n}})\).
Thus, \(A_{\lambda_{n}} \in[A]_{G^{l}} \text{ for all } n \geq1\). So, A is a lower bound for \(\{A_{\lambda_{n}}\}_{n \geq1}\). Now we show that A is a lower bound for \(\{A_{\lambda}\}_{\lambda\in\Lambda}\). If there exists \(\mu\in\Lambda\) such that \(A_{\lambda_{n}} \in[A_{\mu}]_{G^{l}}, \text{ for all } n \geq1\), then \(\phi(A_{\lambda_{n}}) \leq \phi(A_{\mu}) \text{ for all } n \geq1\), which implies that \(\phi(A_{\mu}) = \sup_{\lambda\in\Lambda} \phi(A_{\lambda})\). Since \(H(A_{\lambda _{n}}, A_{\mu}) \leq\phi(A_{\lambda_{n}}) - \phi(A_{\mu})\), from the definition of upper semi-continuous map, we have \(A_{\lambda_{n}} \rightarrow A_{\mu}\). This implies that \(A_{\mu}= A\) (for \(A_{\lambda_{n}} \rightarrow A\)). Hence \(\phi(A) = \sup_{\lambda\in\Lambda} \phi (A_{\lambda})\). We claim that \(A_{\lambda}\in[A]_{G^{l}}\). In fact, if there is \(\lambda\in\Lambda\) such that \(A\in[A_{\lambda}]_{G^{l}}\) then \(H(A_{\lambda}, A) \leq\phi(A_{\lambda}) - \phi(A)\) \(\leq\phi(A_{\lambda}) - \phi(A_{\lambda}) = 0\), and so, \(A_{\lambda}= A\). Since \(\{A_{\lambda}\}_{\lambda\in\Lambda}\) is a path in G, if the previous case is not true, then, for each \(\lambda\in\Lambda\), there exists \(n \geq1\) such that \(A_{\lambda}\in [A_{\lambda_{n}}]_{G^{l}}\).
Again we have \(A_{\lambda_{n}} \in[A]_{G^{l}}\). This implies that \(A_{\lambda}\in[A]_{G^{l}}\). Thus A is a lower bound for \(\{A_{\lambda}\}_{\lambda\in\Lambda}\). Now, using Theorem 2.14, we can say that G has a start set. □
Theorem 2.20
Let \((X,d)\) be a complete metric space, \(\phi: CB(X) \rightarrow (-\infty, \infty)\) a map bounded from above and upper semi-continuous and \(T: CB(X)\rightarrow CB(X)\) a self-path map satisfying the condition \(H(C, A) \leq\phi(C) - \phi(A)\), for all \(C, A \in CB(X)\) and \(C\subset T(A)\). Then T has a fixed set.
Proof
Suppose that G is the directed graph via the vertices \(V(G)=CB(X)\) and the edges \(E(G) = \{(A, B): H(A, B) \leq\phi(A) - \phi(B)\}\). Using Lemma 2.19, we can conclude that G has a start set. Again, using Theorem 2.16, it is trivial to see that T has a fixed set. □
3 Conclusion
In this paper we introduced the new concept of start set and also a concept called fixed set which is analogous to the concept of fixed point for a multivalued map. Our results unify and extend some existing results in the literature. The results discussed in this paper are mainly concerned with the existence of fixed sets. The study of uniqueness of fixed sets in the current context would be an interesting topic for future study. Some famous theorems such as Nadler’s theorem etc. may also be generalized in the present context so that it would be a special case for mappings of the type \(T:CB(X)\rightarrow CB(X)\).
References
Boyd, DW, Wong, JS: On nonlinear contractions. Proc. Am. Math. Soc. 20, 458-464 (1969)
Ran, ACM, Reurings, MCB: A fixed point theorem in partially ordered sets and some applications to matrix equations. Proc. Am. Math. Soc. 132(5), 1435-1443 (2004)
Nieto, JJ, Rodríguez-López, R: Contractive mapping theorems in partially ordered sets and applications to ordinary differential equations. Order 22(3), 223-239 (2005)
Nieto, JJ, Rodríguez-López, R: Existence and uniqueness of fixed point in partially ordered sets and applications to ordinary differential equations. Acta Math. Sin. Engl. Ser. 23(12), 2205-2212 (2007)
Agarwal, RP, O’Regan, D: Fixed point theory for generalized contractions on spaces with two metrics. J. Math. Anal. Appl. 248(2), 402-414 (2000)
Aleomraninejad, SMA, Rezapour, Sh, Shahzad, N: Some fixed point results on a metric space with a graph. Topol. Appl. 159, 659-663 (2012)
Alfuraidan, MR: On monotone pointwise contractions in Banach spaces with graph. Fixed Point Theory Appl. 2015, 139 (2015)
Alfuraidan, MR: Remarks on monotone multivalued mappings on a metric space with graph. J. Inequal. Appl. 2015, 202 (2015)
Alfuraidan, MR, Khamsi, MA: Fixed points of monotone nonexpansive mappings on a hyperbolic metric space with a graph. Fixed Point Theory Appl. 2015, 44 (2015)
Beg, I, Butt, AR, Radojević, S: The contraction principle for set valued mappings on a metric space with a graph. Comput. Math. Appl. 60, 1214-1219 (2010)
Debnath, P: Fixed points of contractive set valued mappings with set valued domains on a metric space with graph. TWMS J. Appl. Eng. Math. 4(2), 169-174 (2014)
Eshi, D, Das, PK, Debnath, P: Coupled coincidence and coupled common fixed point theorems on a metric space with a graph. Fixed Point Theory Appl. 2016, 37 (2016)
Gwozdz-Lukawska, G, Jachymski, J: IFS on a metric space with a graph structure and extensions of the Kelisky-Rivlin theorem. J. Math. Anal. Appl. 356, 453-463 (2009)
Lakshmikantham, V, Ćirić, L: Coupled fixed point theorems for nonlinear contractions in partially ordered metric spaces. Nonlinear Anal., Theory Methods Appl. 70(12), 4341-4349 (2009)
Nieto, JJ, Pouso, RL, Rodríguez-López, R: Fixed point theorems in ordered abstract spaces. Proc. Am. Math. Soc. 135, 2505-2517 (2007)
Petruşel, A, Rus, IA: Fixed point theorems in ordered L-spaces. Proc. Am. Math. Soc. 134, 411-418 (2006)
Sintunavarat, W, Kumam, P: Coupled fixed point results for nonlinear integral equations. J. Egypt. Math. Soc. 21(3), 266-272 (2013)
Sintunavarat, W, Kumam, P, Cho, YJ: Coupled fixed point theorems for nonlinear contractions without mixed monotone property. Fixed Point Theory Appl. 2012, 170 (2012)
Sintunavarat, W, Petruşel, A, Kumam, P: Common coupled fixed point theorems for \(w^{*}\)-compatible mappings without mixed monotone property. Rend. Circ. Mat. Palermo 61(3), 361-383 (2012)
Sintunavarat, W, Radenović, S, Golubović, Z, Kumam, P: Coupled fixed point theorems for F-invariant set. Appl. Math. Inf. Sci. 7(1), 247-255 (2013)
Nadler, SB: Multi-valued contraction mappings. Pac. J. Math. 30(2), 475-488 (1969)
Assad, NA, Kirk, WA: Fixed point theorems for set-valued mappings of contractive type. Pac. J. Math. 43(3), 553-561 (1972)
Espinola, R, Kirk, WA: Fixed point theorems in R-trees with applications to graph theory. Topol. Appl. 153, 1046-1055 (2006)
Jachymski, J: The contraction principle for mappings on a metric space with a graph. Proc. Am. Math. Soc. 136(4), 1359-1373 (2008)
Bojor, F: Fixed point theorems for Reich type contractions on metric spaces with a graph. Nonlinear Anal., Theory Methods Appl. 75(9), 3895-3901 (2012)
Bojor, F: Fixed points of Kannan mappings in metric spaces endowed with a graph. An. Ştiinţ. Univ. ‘Ovidius’ Constanţa, Ser. Mat. 20(1), 31-40 (2012)
Aleomraninejad, SMA, Rezapour, Sh, Shahzad, N: Fixed point results on subgraphs of directed graphs. Math. Sci. 7, 41 (2013)
Bhaskar, TG, Devi, JV: Stability criteria for set differential equations. Math. Comput. Model. 41, 1371-1378 (2005)
Brandao Lopes Pinto, AJ, De Blasi, FS, Iervillino, F: Uniquenss and existence theorems for differential equations with compact convex valued solutions. Boll. UMI 3, 47-54 (1970)
De Blasi, FS: Semifixed sets of maps in hyperspaces with application to set differential equations. Set-Valued Anal. 14(3), 263-272 (2006)
De Blasi, FS, Georgiev, PG: Kakutani-Fan’s fixed point theorem in hyperspaces. Tokyo J. Math. 24(2), 331-342 (2001)
De Blasi, FS, Iervillino, F: Equaziono differenziali con soluzioni a valore compatto convesso. Boll. UMI 4, 491-501 (1969)
Galanis, GN, Bhaskar, TG, Lakshmikantham, V: Set differential equations in Frechet spaces. J. Appl. Anal. 14(1), 103-113 (2008)
Galanis, GN, Bhaskar, TG, Lakshmikantham, V, Palamides, PK: Set valued functions in Frechet spaces: continuity, Hukuhar differentiability and applications to set differential equations. Nonlinear Anal. 61(4), 559-575 (2005)
Lakshmikantham, V, Bhaskar, TG, Devi, JV: Theory of Set Differential Equations in Metric Spaces. Cambridge Scientific Publishers, Cambridge (2006)
Tise, IC: Semifixed sets for multivalued φ-contractions. Creative Math. Inform. 17(3), 516-520 (2008)
Tise, IC: Set integral equations in metric spaces. Math. Movarica 13, 95-102 (2009)
Abbas, M, Alfuraidan, MR, Khan, AR, Nazir, T: Fixed point results for set- contractions on metric spaces with a directed graph. Fixed Point Theory Appl. 2015, 14 (2015). doi:10.1186/s13663-015-0263-z
Abbas, M, Nazir, T, Lampert, TA, Radenovic, S: Common fixed points of set-valued f-contraction mappings on domain of sets endowed with directed graph. Comput. Appl. Math. (2016). doi:10.1007/s40314-016-0314-z
Acknowledgements
The authors are extremely thankful to the reviewers and the Editor-in-Charge for their excellent comments and suggestions toward the improvement of the paper.
The corresponding author expresses his gratitude to Prof. M.R. Alfuraidan (Department of Mathematics & Statistics, King Fahd University of Petroleum and Minerals, Dhahran, 31261, Saudi Arabia) for his constructive feedback regarding some aspects of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Debnath, P., Choudhury, B.S. & Neog, M. Fixed set of set valued mappings with set valued domain in terms of start set on a metric space with a graph. Fixed Point Theory Appl 2017, 5 (2016). https://doi.org/10.1186/s13663-017-0598-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13663-017-0598-8