
Abstract
We establish the existence, uniqueness, and positivity for the fractional Navier boundary value problem:
where \(\alpha,\beta \in (1,2]\), \(D^{\alpha }\) and \(D^{\beta }\) are the Riemann–Liouville fractional derivatives. The nonlinear real function h is supposed to be continuous on \([0,1]\times \mathbb{R\times R}\) and satisfy appropriate conditions. Our approach consists in reducing the problem to an operator equation and then applying known results. We provide an approximation of the solution. Our results extend those obtained in (Dang et al. in Numer. Algorithms 76(2):427–439, 2017) to the fractional setting.
Similar content being viewed by others

1 Introduction
An elastic beam is an important element needed in structures like buildings, bridges, ships, and aircrafts. The deformations of the beam can be modeled (see, e.g., [2]) by the fourth-order Navier boundary value problem
where \(h:[0,1]\times \mathbb{R}\times \mathbb{R\rightarrow R}\) is continuous.
Aftabizadeh [3] studied problem (1.1) under the restriction that h is bounded on \([0,1]\times \mathbb{R}\times \mathbb{R}\). By using a topological degree method he proved the existence and uniqueness of a solution. In [4] (see also [5]) the authors established the existence of a solution for problem (1.1) by means of the lower and upper solutions method. Differently from this method, Dang et al. [1] investigated problem (1.1) by reducing it to an operator equation and using some easily verified conditions. In [6] the authors studied the existence of a solution of a fourth-order differential equation boundary value problem by proving a new fixed point result based on a new distance structure called the extended Branciari b-distance.
Motivated by the novel approach presented in [1], our purpose is generalization of their results to the frame of fractional differentiation. More precisely, we address the question of existence and uniqueness of solutions of the following problem:
where \(\alpha,\beta \in (1,2]\), \(D^{\alpha }\) and \(D^{\beta }\) are the standard Riemann–Liouville differentiation, and the real function h is supposed to be continuous on \([0,1]\times \mathbb{R\times R}\) and satisfying some appropriate conditions.
For \(\alpha =\beta =2\), we recover the results obtained in [1].
In the literature, various mathematical procedures have been considered by scientists through different research-oriented aspects of fractional differential equations. In particular, the fixed point theory has been used very extensively to find solutions of such equations. For instance, in [7] the authors studied the existence of solutions to nonlinear Volterra–Fredholm integral equations of certain types and to nonlinear fractional differential equations of the Caputo type by using the technique of a fixed point with numerical experiment in an extended b-metric space. On the other hand, in [8] the authors established some new fixed-point theorems, which extend and unify several existing results in the literature. As application of their results, they have proved the existence and uniqueness of solutions to some fractional and integer-order differential equations. In [9] the authors established the existence and uniqueness of solutions of boundary value problems for a nonlinear fractional differential equation by means of a fixed point problem for an integral operator. The conditions for the existence and uniqueness of a fixed point for an integral operator are derived via b-comparison functions on complete b-metric spaces. Our approach in the present study consists in applying the Banach fixed point theorem.
Our paper is organized as follows. In Sect. 2, we establish key inequalities on the Green operator functions. In Sect. 3, by reducing problem (1.2) to an operator equation we prove the existence, uniqueness, and positivity of a solution. We propose an approximation process of this solution. We provide some examples at the end of Sect. 3.
2 Preliminaries and lemmas
For the convenience of the reader, we recall some basic definitions and known results related to fractional calculus [10, 11].
Definition 2.1
Let \(\omega: ( 0,\infty ) \rightarrow \mathbb{R} \) be a measurable function. The Riemann–Liouville fractional integral of order \(\gamma >0\) for ω is defined as
where Γ is the Euler gamma function.
Definition 2.2
Let \(\omega: ( 0,\infty ) \rightarrow \mathbb{R} \) be a measurable function. The Riemann–Liouville fractional derivative of order \(\gamma >0\) for ω is defined as
where \(n=[\gamma ]+1\), and \([\gamma ]\) is the integer part of γ.
Lemma 2.3
Let \(\delta >0\) and \(\omega \in C ( 0,1 ) \cap L^{1} ( 0,1 ) \). Then we have
-
(i)
For \(0<\gamma <\delta \), \(D^{\gamma }I^{\delta }\omega =I^{\delta -\gamma }\omega \) and \(D^{\delta }I^{\delta }\omega =\omega \);
-
(ii)
\(D^{\gamma }\omega (t)=0\) if and only if \(\omega (t)=c_{1}t^{\gamma -1}+c_{2}t^{\gamma -2}+\cdots +c_{m}t^{ \gamma -m}\), \(c_{i}\in \mathbb{R} \), \(i=1,\dots,m\), where m is the smallest integer greater than or equal to γ.
-
(iii)
Assume that \(D^{\gamma }\omega \in C ( 0,1 ) \cap L^{1} ( 0,1 ) \). Then
$$\begin{aligned} I^{\gamma }D^{\gamma }\omega ( t ) =\omega (t)+c_{1}t^{ \gamma -1}+c_{2}t^{\gamma -2}+ \cdots+c_{m}t^{\gamma -m}, \end{aligned}$$\(c_{i}\in \mathbb{R} \), \(i=1,\ldots,m\), where m is the smallest integer greater than or equal to γ.
Lemma 2.4
([12])
For \(\gamma \in (1,2]\) and \(\varphi \in C([0,1],\mathbb{R})\), the unique solution of
is
where
Proof
To make the argument complete and self-contained, we reproduce this short proof. By means of Lemma 2.3 we can equivalently reduce (2.1) to
From the conditions \(\omega (0)=0\) and \(\omega (1)=0\) we get
Substituting \(c_{1}\) and \(c_{2}\) into (2.4), we obtain (2.2). □
Throughout the paper, for \(\gamma \in (1,2]\) and \(\varphi \in C([0,1],\mathbb{R})\), we denote
Remark 2.5
Let \(\gamma \in (1,2]\).
-
(i)
Note that \((t,y)\rightarrow G_{\gamma }(t,y)\) is a nonnegative continuous function on \([ 0,1 ] \times [ 0,1 ] \).
-
(ii)
For \(\varphi \in C([0,1],\mathbb{R})\), the function \(t\rightarrow \mathcal{G}_{\gamma }\varphi (t)\) is continuous on \([0,1]\).
Lemma 2.6
Let \(\alpha,\beta \in (1,2]\) and \(\varphi \in C([0,1],\mathbb{R})\). Then
where \(\Vert \varphi \Vert := \underset{t\in [ 0,1]}{\max } \vert \varphi (t) \vert \).
Proof
From (2.5) and Remark 2.5 we have
where
By using (2.3) and a simple computation we get
Since \(\Vert \psi \Vert =\psi (\frac{\alpha -1}{\alpha })=M_{\alpha }\), from (2.7) we deduce that
Hence
The proof is completed. □
3 Existence results and iterative method
For \(\alpha,\beta \in (1,2]\) and \(M>0\), we let
and denote by
Theorem 3.1
Let \(h\in C([0,1]\times \mathbb{R}\times \mathbb{R},\mathbb{R)}\). Assume that there exist \(M>0\) and \(L_{i}>0\) \((i=1,2)\) such that
-
(i)
\(\vert h(t,y,z) \vert \leq M\) for all \((t,y,z)\in \mathcal{D}_{M}\).
-
(ii)
\(\vert h(t,y_{2},z_{2})-h(t,y_{1},z_{2}) \vert \leq L_{1} \vert y_{2}-y_{1} \vert +L_{2} \vert z_{2}-z_{1} \vert \) for all \((t,y_{i},z_{i})\in \mathcal{D}_{M}\), \(i=1,2\).
-
(iii)
\(q:=L_{1}M_{\alpha }M_{\beta }+L_{2}M_{\alpha }<1\).
Then problem (1.2) admits a unique continuous solution ω with \(D^{\beta }\omega \in C([0,1],\mathbb{R)}\) satisfying
Proof
Let \(\varphi \in C([0,1],\mathbb{R})\) and set
Assume that ω is a continuous solution of problem (1.2) with \(D^{\beta }\omega \in C([0,1]\mathbb{)}\). Then by Lemma 2.4 the function \(\varphi (t):=h(t,\omega (t),D^{\beta }\omega (t))\) is a fixed point of the operator T.
Conversely, if φ is a fixed point of the operator T, then again by Lemma 2.4
is a continuous solution of problem (1.2) with \(D^{\beta }\omega (t)=-\mathcal{G}_{\alpha }\varphi (t)\in C([0,1] \mathbb{)}\). So, problem (1.2) is reduced to a fixed point problem for T.
Since \(h\in C([0,1]\times \mathbb{R}\times \mathbb{R},\mathbb{R)}\), it is clear from Remark 2.5 that Tφ is continuous on \([0,1]\).
Due to Lemma 2.6, for \(\varphi \in \mathbb{B}_{M}\), we have
Hence, for \(t\in [ 0,1]\), \((t,\mathcal{G}_{\beta } ( \mathcal{G}_{\alpha }\varphi ) (t),- \mathcal{G}_{\alpha }\varphi (t))\in \mathcal{D}_{M}\), and by assumption (i) we have \(T(\mathbb{B}_{M})\subset \mathbb{B}_{M}\).
We claim aim that T is a contraction on \(\mathbb{B}_{M}\). Indeed, for \(\varphi _{1},\varphi _{2}\in \mathbb{B}_{M}\), by assumption (ii) and Lemma 2.4 we have
Since \(q:=L_{1}M_{\alpha }M_{\beta }+L_{2}M_{\alpha }<1\), we deduce that T is a contraction operator on \(\mathbb{B}_{M}\). Hence there exists a unique \(\varphi \in \mathbb{B}_{M}\) such that
So, problem (1.2) admits a unique solution \(\omega (t):=\mathcal{G}_{\beta } ( \mathcal{G}_{\alpha }\varphi ) (t) \in C([0,1],\mathbb{R})\) satisfying (3.1). □
Remark 3.2
Theorem 3.1 extends Theorem 1 in [1] to the fractional setting.
To establish the positivity of solution of problem (1.2), for \(M>0\), we denote
Corollary 3.3
Let h be a continuous function on \([0,1]\times \mathbb{R}\times \mathbb{R}\). Assume that there exist \(M>0\) and \(L_{i}>0\) \((i=1,2)\) such that
-
(i)
\(0\leq h(t,y,z)\leq M\) for all \((t,y,z)\in \mathcal{D}_{M}^{+}\).
-
(ii)
\(\vert h(t,y_{2},z_{2})-h(t,y_{1},z_{2}) \vert \leq L_{1} \vert y_{2}-y_{1} \vert +L_{2} \vert z_{2}-z_{1} \vert \) for all \((t,y_{i},z_{i})\in \mathcal{D}_{M}^{+}\), \(i=1,2\).
-
(iii)
\(q:=L_{1}M_{\alpha }M_{\beta }+L_{2}M_{\alpha }<1\).
Then problem (1.2) admits a unique nonnegative continuous function ω satisfying
Theorem 3.4
(Iterative method)
Under the assumptions of Theorem 3.1, consider the iterative process defined by
The sequence \((\mathcal{G}_{\beta } ( \mathcal{G}_{\alpha }\varphi _{k} ) )_{k\geq 0}\) converges uniformly to ω, the unique solution of problem (1.2), and we have
where \(q:=L_{1}M_{\alpha }M_{\beta }+L_{2}M_{\alpha }<1\).
Proof
From the proof of Theorem 3.1 we know that the sequence \((\varphi _{k})_{k\geq 0}\) converges to a unique \(\varphi \in \mathbb{B}_{M}\) satisfying \(T(\varphi )=\varphi \), and we have
By using Lemma 2.6 we deduce
Hence the sequence \((\mathcal{G}_{\beta } ( \mathcal{G}_{\alpha }\varphi _{k} ) )_{k\geq 0}\) converges uniformly to ω, and inequality (3.7) holds. □
Remark 3.5
Theorem 3.4 extends Theorem 3 in [1] to the fractional setting.
Example 3.6
Let \(\alpha =\beta =\frac{3}{2}\), and consider the problem
In this example, \(M_{\alpha }=M_{\beta }=\frac{8}{27}\frac{\sqrt{3}}{\sqrt{\pi }}\) and \(f(t,y,z)=e^{y}\). To ensure assumption (i) in Theorem 3.1, we have to choose \(M>0\) such that
This holds, for example, with \(M=2\).
On the other hand, in \(\mathcal{D}_{2}=\{(t,y,z)\in \mathbb{R}^{3}: 0\leq t\leq 1, \vert y \vert \leq \frac{128}{243\pi }, \vert z \vert \leq \frac{16}{27} \frac{\sqrt{3}}{\sqrt{\pi }}\}\), since
we have
Hence assumption (ii) in Theorem 3.1 is satisfied with \(L_{1}=2\) and \(L_{2}=1\). Also, we have \(q:=L_{1}M_{\alpha }M_{\beta }+L_{2}M_{\alpha }\approx 0.457 21<1\). Thus by Theorem 3.1 problem (3.9) admits a unique continuous solution ω satisfying
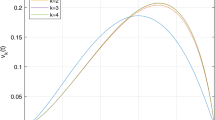
Take the initial approximation \(\varphi _{0}(t)=1\). Some iterations of \(\omega _{k}(t):=\mathcal{G}_{\frac{3}{2}} ( \mathcal{G}_{\frac{3}{2}}\varphi _{k} ) (t)\) are presented in Fig. 1.

Graphs of the successive approximation of ω
Example 3.7
For \(\alpha =\frac{4}{3}\) and \(\beta =\frac{5}{3}\), consider the problem
In this example, \(M_{\alpha }=\frac{3}{4\Gamma ( \frac{7}{3} ) }(\frac{1}{4})^{\frac{1}{3}}\), \(M_{\beta }=\frac{3}{5\Gamma ( \frac{8}{3} ) }(\frac{2}{5})^{\frac{2}{3}}\), and \(f(t,y,z)=ty+t^{2}z^{2}+1\).
Assumption (i) in Theorem 3.1 will hold if we choose \(M>0 \) such that
We can verify that \(M=2\) is a suitable candidate. On the other hand, since
it follows that for \((t,y,z)\in \mathcal{D}_{2}=\{(t,y,z)\in \mathbb{R}^{3}: 0\leq t\leq 1, \vert y \vert \leq 2M_{\alpha }M_{\beta }, \vert z \vert \leq 2M_{\alpha }\}\),
So assumption (ii) in Theorem 3.1 is satisfied with \(L_{1}=1\) and \(L_{2}=2\). Also, we have \(q:=L_{1}M_{\alpha }M_{\beta }+L_{2}M_{\alpha }\approx 0.879 55<1\).
Hence problem (3.10) admits a unique continuous solution ω satisfying
This solution can be approximate by the sequence \(\omega _{k}(t):\mathcal{G}_{\frac{5}{3}} ( \mathcal{G}_{\frac{4}{3}}\varphi _{k} ) (t)\) with \(\varphi _{0}(t)=1\). Some iterations are presented in Fig. 2.

Graphs of the successive approximation of ω
Availability of data and materials
Not applicable.
References
Dang, Q.A., Long, D.Q., Ngo, T.K.Q.: A novel efficient method for nonlinear boundary value problems. Numer. Algorithms 76(2), 427–439 (2017). https://doi.org/10.1007/s11075-017-0264-6
Reiss, E.L., Callegari, A.J., Ahluwalia, D.S.: Ordinary Differential Equations with Applications. Holt, Rinehart and Winston, New York (1976)
Aftabizadeh, A.R.: Existence and uniqueness theorems for fourth-order boundary value problems. J. Math. Anal. Appl. 116(2), 415–426 (1986). https://doi.org/10.1016/S0022-247X(86)80006-3
Ruyun, M., Jihui, Z., Shengmao, F.: The method of lower and upper solutions for fourth-order two-point boundary value problems. J. Math. Anal. Appl. 215(2), 415–422 (1997). https://doi.org/10.1006/jmaa.1997.5639
Bai, Z., Ge, W., Wang, Y.: The method of lower and upper solutions for some fourth-order equations. JIPAM. J. Inequal. Pure Appl. Math. 5(1), 13–18 (2004)
Abdeljawad, T., Karapınar, E., Kumari, P.S., Mlaiki, N.: Solutions of boundary value problems on extended-Branciari b-distance. J. Inequal. Appl. 2020, 103 (2020). https://doi.org/10.1186/s13660-020-02373-1
Abdeljawad, T., Agarwal, R.P., Karapınar, E., Kumari, P.S.: Solutions of the nonlinear integral equation and fractional differential equation using the technique of a fixed point with a numerical experiment in extended b-metric space. Symmetry 11(5), 686 (2019)
Karapınar, E., Abdeljawad, T., Jarad, F.: Applying new fixed point theorems on fractional and ordinary differential equations. Adv. Differ. Equ. 421, 25 (2019). https://doi.org/10.1186/s13662-019-2354-3
Sevinik Adiguzel, R., Aksoy, U., Karapınar, E., Erhan, I.M.: On the solution of a boundary value problem associated with a fractional differential equation. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6652
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. North-Holland Mathematics Studies, vol. 204. Elsevier, Amsterdam (2006)
Samko, S.G., Kilbas, A.A., Marichev, O.I., et al.: Fractional Integrals and Derivatives, vol. 1. Gordon & Breach, Yverdon-les-Bains (1993)
Bai, Z., Lü, H.: Positive solutions for boundary value problem of nonlinear fractional differential equation. J. Math. Anal. Appl. 311(2), 495–505 (2005). https://doi.org/10.1016/j.jmaa.2005.02.052
Acknowledgements
Not applicable.
Funding
The authors would like to extend their sincere appreciation to the Deanship of Scientific Research at King Saud University for its funding this Research group NO (RG-1435-043).
Author information
Authors and Affiliations
Contributions
Both authors contributed equally to the writing of this paper. Both authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bachar, I., Eltayeb, H. Existence and uniqueness results for fractional Navier boundary value problems. Adv Differ Equ 2020, 609 (2020). https://doi.org/10.1186/s13662-020-03071-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-03071-4