
Abstract
In this paper, the control of uncertain fractional-order Chua–Hartley (FOCH) chaotic systems by means of adaptive neural network backstepping control is considered. Neural network is utilized as a universal approximator to estimate the unknown nonlinear function. By using the fractional Lyapunov stability criterion and the backstepping technique, an adaptive neural network control (ANNC) method is implemented. In each backstepping step, the unknown nonlinear functions are approximated by neural networks, and a virtual control input is designed. The proposed method guarantees that all the closed-loop signals keep bounded and tracking error converges to an arbitrary small region of zero. Finally, numerical simulation is given to confirm the effectiveness and the good control performance of the proposed method.
Similar content being viewed by others

1 Introduction
Chaos phenomena, which have attracted increasing attention of scholars from many fields, intensively exist in many actual nonlinear systems. More and more interesting results have been reported on this theme because it has possible applications in some domains, such as control, information processing, and secure communication [1,2,3,4,5,6,7,8,9]. Up to now, the synchronization and control of chaotic systems has become a hot research topic. A number of methods have been developed for the chaotic systems, for example, pinning control [10], adaptive control [11, 12], sliding mode control (SMC) [13, 14], backstepping control, and many others. Among these control methods, backstepping control is an effective control method to handle the SISO chaotic systems with triangular structure. In the backstepping control design, in each step, a virtual control input should be designed, and finally, in the last step, the controller will be designed. The backstepping control approach has some interesting control performance, for example, global stability, easy to be implemented [15].
On the other hand, fractional calculus has received more and more attention. During the past two decades, nonlinear systems described by fractional differential equations have had many applications in robotics, engineering, biophysics, electron-analytical chemistry [16,17,18,19,20,21,22,23,24,25,26,27,28]. Compared with the classical integer-order calculus, the fractional-order one is more accurate in describing many practical problems [29,30,31,32,33]. In particular, by using the fractional controller, one can expand the freedom of the controlled system by one more degree and obtain better control performance. The stability for the uncertain fractional-order chaotic systems was obtained via SMC in [34, 35], where a key assumption is that the models of the chaotic systems should be known in advance. Synchronization and control of fractional-order chaotic systems has become a hot research topic. In [11], adaptive fuzzy controller was designed for fractional-order chaotic systems with dead-zone. In [17], a fractional sliding surface was designed to synchronize two non-identical fractional-order NNs, where the prior knowledge of the uncertain gain matrices is needed.
It is well known that system models were usually partly known even fully unknown in practical applications, and these system uncertainties always affect the control performance and the closed-loop stability if they are not handled well [36,37,38,39,40,41,42,43,44,45]. To handle this type of problem, fuzzy logic system (FLS) and neural network (NN) were used for estimating system uncertainties. One major benefit of the aforementioned methods consists in that they can tackle mismatched system uncertainties that cannot be linearly parameterized. That is to say, adaptive fuzzy control (AFC) and adaptive NN control are interesting and effective issues [46,47,48]. By using dynamic fuzzy NN method and backstepping technique, the control of uncertain chaotic systems was addressed in [49]. Ref. [50] researched the control of a class of strict-feedback nonlinear systems with functional uncertainties by using NN learning control method. Base on the adaptive fuzzy backstepping technique, the control of uncertain fractional-order nonlinear systems was investigated in [15]. It should be mentioned that in the proposed method of [15], a fuzzy system should be used to approximate a fractional-order term, which may decrease the control performance and need large control energy.
Motivated by the above analysis, we aim to present the stability analysis of a FOCH chaotic system with unknown external disturbances by using the backstepping technique. Firstly, the system uncertainties are approximated by NNs; secondly, based on the fractional Lyapunov stability theory, a fractional adaptation law that ensures that the states of a system converge to a small region of zero is designed; finally, the NN backstepping controller is implemented step by step. The main contribution of the proposed method includes the following: (1) Adaptive NN control together with backstepping control method is proposed for fractional-order chaotic systems, and the prior knowledge of the system model is not needed. (2) In each step, a fractional-order signal is constructed to cancel the approximation error of the unknown nonlinear function. That is to say, the aforementioned problem of [15] is solved in this paper.
2 Preliminaries
2.1 Fractional calculus concept
In this part, we will give some results about the fractional calculus that will be used later.
Definition 1
([51])
The fractional integral of a smooth function \(\mu (\nu )\) can be given as
where \(\varGamma (\rho )=\int ^{+\infty }_{0}\nu ^{\rho -1}e^{-\nu }\,d \nu \).
Definition 2
([51])
The ρth Caputo derivative of \(\mu (\nu )\) is defined as
where \(n-1\leq \rho < n\), \(n\in \mathbb{N}\). For convenience, we always suppose that \(\rho \in (0,1]\) in this paper.
Definition 3
([51])
The Mittag-Leffler function can be given by
where \(\alpha _{1}, \alpha _{2} >0\) and \(\nu \in \mathbb{C}\).
Lemma 1
([52])
Let \(\mu (\nu )=0\) be an equilibrium point of the fractional order system
If there exists a Lyapunov function \(V(\nu ,\mu (\nu ))\) and a class-\(\mathcal{K}\) function \(\lambda _{i}\) satisfying
then system (4) is Mittag-Leffler stable.
Lemma 2
([53])
Suppose that \(\mu (\nu )\in \mathbb{R}^{n}\) is a smooth function. Then the following inequalities hold:
Lemma 3
([54])
Assume that \(g(\nu )\) is a positive definite smooth function, it holds
where \(\varrho _{1}, \varrho _{2} \in \mathbb{R}\) are two positive parameters, then \(g(\nu )\) will eventually be as small as possible under proper values of the coefficients.
2.2 Characterization of the NN
A three-layer MIMO NN will be used to approximate unknown system uncertainty, which has the structure as shown in Fig. 1.

NN structure
Let η, k, and m be the number of neurons in the input layer, hidden layer, and output layer, respectively. Thus, the mathematical model of the above NN is expressed by
in which \(p=1,\ldots,m\),
\(y_{k}\) represents the output. Usually, the function \(\varphi (\cdot )\) can be defined as
Denote
NN (9) can be expressed by
NN (10) can be used to approximate unknown function \(\varPsi (\eta (s))\) by
with \(\varsigma (\eta (s))\) being the approximation error. Let us define the optimal approximate error \(\phi ^{*}\) as follows:
3 Main results
Consider the FOCH chaotic system, which can be expressed as follows [55]:
where \(u_{i}\) is the state variable, \(\vartheta (s)\) is an unknown nonlinear function, and \(w(s)\) is the control input.
Our objective is to design an adaptive NN controller such that the system is asymptotically stable. The backstepping design procedure is given by n steps as follows.
For system (12), let \(\bar{\xi }_{1}(t)=u_{1}(s)\), then
Introducing a virtual controller \(\eta _{1}(s)\), then we have
Choose \(\eta _{1}(s)\) as
Substituting (14) and (15) into Eq. (13), we can get
Differentiating \(\bar{\xi }_{2}(s)\) yields
Let
then (17) is rearranged by
We choose \(\eta _{2}(s)\) as
which implies that
From (18), we have
Based on the above discussion, the main results are given as follows.
Theorem 1
Consider system (12). If \(\vartheta (s)\) is known, and the controller is given as
then the system is globally asymptotically stable, where \(\eta _{i}(s)\) is the designed virtual controller, \(k_{1}\), \(k_{2}\), \(k_{3}\) are three positive constants.
Proof
Consider the following Lyapunov function:
It follows from Lemma 2 that
Substituting (16), (21), and (22) into (24), we have
Final controller can be chosen as
which yields
where \(\sigma =2\min \{k_{1}, k_{2}, k_{3}\}\). □
Therefore, it follows from Lemmas 1 and 3 that system (12) is globally asymptotically stable.
However, since \(\vartheta (s)\) is unknown, the controller \(w(s)\) cannot be achieved directly. Now, the adaptive NN backstepping controller is designed as follows.
By employing NNs (10), the unknown function \(\vartheta (s)\) can be approximated by
The following inequalities will be used:
where \(\varPi = \Vert \phi ^{*} \Vert ^{2}\), \(\tilde{\varPi }=\varPi -\hat{\varPi }\) with Π̂ being the estimation of Π.
To achieve the control, we choose \(w(t)\) as
and the adaptation law is given as
Based on the above detailed procedure, we can obtain the following theorem.
Theorem 2
Consider the fractional-order chaotic system (12). If the NN controller and the fractional adaptation laws are designed as
respectively, then the states of system (12) will converge to a small neighborhood of zero.
Proof
Define the Lyapunov function as
Using using (25), (28), (31), and Lemma 2, we have
Substituting (29), (30), and (32) into (34) yields
Note that
then (35) can be rearranged as
where \(\rho _{1}=\min \{2k_{1}, 2k_{2}, 2k_{3}-1, 1\}\), \(\rho _{2}= \frac{1}{2}+\frac{1}{2}\varsigma ^{*2}+\frac{1}{2}\varPi ^{2}\).
Thus, according to (37) and Lemma 3, the states of system (12) will remain in a small neighborhood of zero. □
Remark 1
In this work, NN approximation-based adaptive control method is used. In fact, the NN approximation-based adaptive control method has attracted more and more scholars’ attention in the past years. Compared with the conventional control method, the NN control method has some satisfactory merits. Firstly, the complexity of modeling practical systems can be greatly simplified. As a result, the controller design problem for many nonlinear systems subject to functional uncertainties can be alleviated. Secondly, according to the practical persistently exciting condition of NNs, parameter convergence is easier to be achieved and it can also improve the control performance. In addition, a NN control method treats the similar or the same mission as a new one and recalculates adaptive parameters to ensure the stability of the controlled system without the prior knowledge; however, the traditional adaptive control needs not only the adaptability but also the capabilities of accurate parameter estimation and knowledge storage with reusage for other similar or same missions.
Remark 2
To update the parameters of the NNs, the fractional-order adaptation law (32) is given. From the proof of Theorem 2, we know that the fractional-order adaptation law plays an important role in the stability analysis of fractional-order systems. Compared with the traditional law, the fractional one has one more degree. In fact, the traditional law can be seen as an exceptional case of the fractional one, i.e., \(\alpha =1\).
Remark 3
In this paper, backstepping control approach is used. This is a technique of designing stabilizing controls for systems with triangular form. This type of systems is constructed from subsystems that radiate out from an irreducible subsystem that can be stabilized using some other method. That is to say, the triangular systems have recursive structure, and the controller can be implemented at the known-stable system and back to stabilize each outer subsystem. It is worth mentioning that there are many control approaches, such as feedback control, adaptive control, impulsive control, that can be used to control fractional-order chaotic systems. However, the aforementioned control methods can not be used as a recursive algorithm.
4 Circuit realization for the FOCH chaotic system
In this section, we will build an electronic circuit for the FOCH chaotic system. In the literature [56], the approximation of \(\frac{1}{t^{0.9}}\) is given by
Base on this approximation, a unit circuit is designed to implement the function \(\frac{1}{t^{0.9}}\) which is shown in Fig. 2. Here, the chain fractance consists of three resistors \(R_{x}\), \(R_{y}\), \(R_{z}\) and three capacitors \(C_{x}\), \(C_{y}\), \(C_{z}\). The transfer function \(\operatorname{FC}(t)\) of this chain fractance is written as follows:
Let \(C_{0}=1\ \mu \mathrm{F}\), from (38) and (39), we can gain \(R_{x}=62.84 \ \mathrm{M}\varOmega \), \(R_{y}=250\ \mathrm{k}\varOmega \), \(R_{z}=205\ \mathrm{k}\varOmega \), \(C_{x}=1.23 \ \mu \mathrm{F}\), \(C_{y}=1.835\ \mu \mathrm{F}\), \(C_{z}=1.1\ \mu \mathrm{F}\), \(\operatorname{FC}(t)\approx \frac{1}{t^{0.9}}\).

Unit circuit for realizing \(\frac{1}{t^{0.9}}\)
s
To realize the FOCH chaotic system, an electronic circuit is designed using R–C components, analog multipliers and operational amplifiers. The circuit diagram is depicted in Fig. 3, its mathematical equations are given as the following form:
where \(C_{1}\), \(C_{2}\), \(C_{3}\) are three fractional capacitors, they are implemented by \(R_{x}\), \(R_{y}\), \(R_{z}\), \(C_{x}\), \(C_{y}\), \(C_{z}\). In order to satisfy FOCH chaotic system (12), we choose the values of resistors and capacitors as follows:

Simulation circuit of FOCH chaotic system (12)
5 Simulation studies
The validity of the proposed method will be indicated by simulation results in this part.
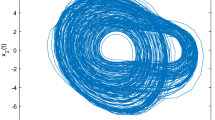
For FOCH system (12), let the initial condition be \(u_{1}(0)=1.0\), \(u_{2}(0)=-1.0\), \(u_{3}(0)=0.5\), where \(\alpha =0.9\). Let \(\omega (s)\equiv \vartheta (s) \equiv 0 \), the dynamical behavior of system (12) is depicted in Fig. 4.

Dynamical behavior of system (12) with \(\omega (s)=0\)
Let the unknown nonlinear function be \(\vartheta (s) = u_{1}(s)u_{3}(s)+u _{2}(s)\), and the control parameters are given as \(k_{1}=k_{2}=k_{3}=1\).
Figure 5 gives the response of the output variable \(u_{1}\), from which we can see that the output variable converges to a small region of the origin rapidly. The smoothness of the control input \(\omega (s)\) and the NN \(\phi (s)\) are given in Fig. 6 and Fig. 7, respectively. The initial value of the NN is random. It is indicated that the proposed method has good control performance.

Time response of state variables of \(u_{1}\)

Control input ω

NN parameters ϕ
To test the robustness of this method, we add external disturbance to system (12): \(d_{1}(t)=3\sin t\), \(d_{2}(t)=3\cos t\), \(d_{3}(t)=3.5 \sin t-3\cos t\). The simulation results are shown in Fig. 8. From Fig. 8, we can see that the variables quickly converge to the origin with very small fluctuations. That is to say, our control method has very good robustness.

Simulation trajectories of system (12) with external disturbance
6 Conclusions
This paper provides an adaptive NN control approach for a class of fractional-order chaotic systems. The NNs are used to approximate unknown system uncertainties and external disturbances. By using the backstepping control technique, a NN controller is constructed. It is proven that the proposed controller combined with fractional-order parameter adaptation law can guarantee the stability of the closed-loop system. Noting that the proposed controller has a complicated form, how to design a backstepping controller resolving the “explosion of terms” problem is our future research direction.
References
Cao, J., Ruoxia, L.I., Mathematics, S.O.: Fixed-time synchronization of delayed memristor-based recurrent neural networks. Sci. China Inf. Sci. 60(3), 032201 (2017)
Li, G.: Adaptive neural network synchronization for uncertain strick-feedback chaotic systems subject to dead-zone input. Adv. Differ. Equ. 2018, 188 (2018)
Guo, Y.: Exponential stability analysis of travelling wave solutions for nonlinear delayed cellular neural networks. Dyn. Syst. 32(4), 490–503 (2017)
Vaidyanathan, S., Sambas, A., Mamat, M., Sanjaya, W.M.: A new three-dimensional chaotic system with a hidden attractor, circuit design and application in wireless mobile robot. Arch. Control Sci. 27(4), 541–554 (2017)
Li, F., Gao, Q.: Blow-up of solution for a nonlinear Petrovsky type equation with memory. Appl. Math. Comput. 274, 383–392 (2016)
Gao, L., Wang, D., Wang, G.: Further results on exponential stability for impulsive switched nonlinear time-delay systems with delayed impulse effects. Appl. Math. Comput. 268, 186–200 (2015)
He, X., Qian, A., Zou, W.: Existence and concentration of positive solutions for quasilinear Schrödinger equations with critical growth. Nonlinearity 26(12), 3137 (2013)
Sambas, A., WS, M.S., Mamat, M.: Bidirectional coupling scheme of chaotic systems and its application in secure communication system. J. Eng. Sci. Technol. Rev. 8(2), 89–95 (2015)
Cao, Y.: Bifurcations in an Internet congestion control system with distributed delay. Appl. Math. Comput. 347, 54–63 (2019)
Cao, J., Guerrini, L., Cheng, Z.: Stability and Hopf bifurcation of controlled complex networks model with two delays. Appl. Math. Comput. 343, 21–29 (2019)
Liu, H., Li, S., Wang, H., Sun, Y.: Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Inf. Sci. 454–455, 30–45 (2018)
Mobayen, S., Vaidyanathan, S., Sambas, A., Kaçar, S., Çavuşoğlu, Ü.: A novel chaotic system with boomerang-shaped equilibrium, its circuit implementation and application to sound encryption. Iran. J. Sci. Technol. Trans. Electr. Eng. 43(1), 1–12 (2019)
Li, G., Cao, J., Alsaedi, A., Ahmad, B.: Limit cycle oscillation in aeroelastic systems and its adaptive fractional-order fuzzy control. Int. J. Mach. Learn. Cybern. 9(8), 1297–1305 (2018)
Pradeep, C., Cao, Y., Murugesu, R., Rakkiyappan, R.: An event-triggered synchronization of semi-Markov jump neural networks with time-varying delays based on generalized free-weighting-matrix approach. Math. Comput. Simul. 155, 41–56 (2019)
Liu, H., Pan, Y., Li, S., Chen, Y.: Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 47(8), 2209–2217 (2017)
Vaidyanathan, S., Azar, A.T., Rajagopal, K., Sambas, A., Kacar, S., Cavusoglu, U.: A new hyperchaotic temperature fluctuations model, its circuit simulation, FPGA implementation and an application to image encryption. Int. J. Simul Process Model. 13(3), 281–296 (2018)
Liu, H., Pan, Y., Li, S., Chen, Y.: Synchronization for fractional-order neural networks with full/under-actuation using fractional-order sliding mode control. Int. J. Mach. Learn. Cybern. 9(7), 1219–1232 (2018)
Shen, T., Xin, J., Huang, J.: Time–space fractional stochastic Ginzburg–Landau equation driven by Gaussian white noise. Stoch. Anal. Appl. 36(1), 103–113 (2018)
Li, M., Wang, J.: Exploring delayed Mittag-Leffler type matrix functions to study finite time stability of fractional delay differential equations. Appl. Math. Comput. 324, 254–265 (2018)
Liu, S., Wang, J., Zhou, Y., Fečkan, M.: Iterative learning control with pulse compensation for fractional differential systems. Math. Slovaca 68(3), 563–574 (2018)
Zhang, J., Wang, J.: Numerical analysis for Navier–Stokes equations with time fractional derivatives. Appl. Math. Comput. 336, 481–489 (2018)
Huang, C., Li, H., Cao, J.: A novel strategy of bifurcation control for a delayed fractional predator–prey model. Appl. Math. Comput. 347, 808–838 (2019)
Zhang, J., Lou, Z., Ji, Y., Shao, W.: Ground state of Kirchhoff type fractional Schrödinger equations with critical growth. J. Math. Anal. Appl. 462(1), 57–83 (2018)
Wang, Y., Jiang, J.: Existence and nonexistence of positive solutions for the fractional coupled system involving generalized p-Laplacian. Adv. Differ. Equ. 2017(1), 337 (2017)
Feng, Q., Meng, F.: Traveling wave solutions for fractional partial differential equations arising in mathematical physics by an improved fractional Jacobi elliptic equation method. Math. Methods Appl. Sci. 40(10), 3676–3686 (2017)
Hao, X.: Positive solution for singular fractional differential equations involving derivatives. Adv. Differ. Equ. 2016(1), 139 (2016)
Zhu, B., Liu, L., Wu, Y.: Existence and uniqueness of global mild solutions for a class of nonlinear fractional reaction–diffusion equations with delay. Comput. Math. Appl. (2016)
Yuan, Y., Zhao, S.: Mixed two-and eight-level fractional factorial split-plot designs containing clear effects. Acta Math. Appl. Sin. Engl. Ser. 32(4), 995–1004 (2016)
Xu, R., Zhang, Y.: Generalized Gronwall fractional summation inequalities and their applications. J. Inequal. Appl. 2015(1), 242 (2015)
Wang, J., Yuan, Y., Zhao, S.: Fractional factorial split-plot designs with two- and four-level factors containing clear effects. Commun. Stat., Theory Methods 44(4), 671–682 (2015)
Guo, Y.: Nontrivial solutions for boundary-value problems of nonlinear fractional differential equations. Bull. Korean Math. Soc. 47(1), 81–87 (2010)
Zhang, L., Zheng, Z.: Lyapunov type inequalities for the Riemann–Liouville fractional differential equations of higher order. Adv. Differ. Equ. 2017(1), 270 (2017)
Yan, F., Zuo, M., Hao, X.: Positive solution for a fractional singular boundary value problem with p-Laplacian operator. Bound. Value Probl. 2018(1), 51 (2018)
Huang, C., Cao, J.: Active control strategy for synchronization and anti-synchronization of a fractional chaotic financial system. Phys. A, Stat. Mech. Appl. 473(2), 526–537 (2017)
Ahmed, S., Wang, H., Tian, Y.: Model-free control using time delay estimation and fractional-order nonsingular fast terminal sliding mode for uncertain lower-limb exoskeleton. J. Vib. Control 24(22), 5273–5290 (2018)
Wu, H.: Liouville-type theorem for a nonlinear degenerate parabolic system of inequalities. Math. Notes 103(1–2), 155–163 (2018)
Hao, X., Zuo, M., Liu, L.: Multiple positive solutions for a system of impulsive integral boundary value problems with sign-changing nonlinearities. Appl. Math. Lett. 82, 24–31 (2018)
Wang, P., Liu, X., Liu, Z.: The convexity of the level sets of maximal strictly space-like hypersurfaces defined on 2-dimensional space forms. Nonlinear Anal. 174, 79–103 (2018)
Peng, X., Shang, Y., Zheng, X.: Lower bounds for the blow-up time to a nonlinear viscoelastic wave equation with strong damping. Appl. Math. Lett. 76, 66–73 (2018)
Sun, W.W.: Stabilization analysis of time-delay Hamiltonian systems in the presence of saturation. Appl. Math. Comput. 217(23), 9625–9634 (2011)
Sun, W., Peng, L.: Observer-based robust adaptive control for uncertain stochastic Hamiltonian systems with state and input delays. Nonlinear Anal., Model. Control 19(4), 626–645 (2014)
Xu, Y., Zhang, H.: Multiple positive solutions of a m-point boundary value problem for 2nth-order singular integro-differential equations in Banach spaces. Nonlinear Anal., Theory Methods Appl. 70(9), 3243–3253 (2009)
Xu, Y., Zhang, H.: Positive solutions of an infinite boundary value problem for nth-order nonlinear impulsive singular integro-differential equations in Banach spaces. Appl. Math. Comput. 218(9), 5806–5818 (2012)
Liu, C., Wu, X.: The boundedness of the operator-valued functions for multidimensional nonlinear wave equations with applications. Appl. Math. Lett. 74, 60–67 (2017)
Lin, X., Zhao, Z.: Iterative technique for third-order differential equation with three-point nonlinear boundary value conditions. Electron. J. Qual. Theory Differ. Equ. 2016, 12 (2016)
Chen, W., Ge, S.S., Wu, J., Gong, M.: Globally stable adaptive backstepping neural network control for uncertain strict-feedback systems with tracking accuracy known a priori. IEEE Trans. Neural Netw. Learn. Syst. 26(9), 1842–1854 (2015)
Wu, J., Chen, W., Li, J.: Fuzzy-approximation-based global adaptive control for uncertain strict-feedback systems with a priori known tracking accuracy. Fuzzy Sets Syst. 273(8), 1–25 (2015)
Boulkroune, A., Saad, M.M., Farza, M.: Adaptive fuzzy system-based variable-structure controller for multivariable nonaffine nonlinear uncertain systems subject to actuator nonlinearities. Neural Comput. Appl. 28(11), 3371–3384 (2017)
Lin, D., Wang, X., Nian, F., Zhang, Y.: Dynamic fuzzy neural networks modeling and adaptive backstepping tracking control of uncertain chaotic systems. Neurocomputing 73(16–18), 2873–2881 (2010)
Pan, Y., Sun, T., Liu, Y., Yu, H.: Composite learning from adaptive backstepping neural network control. Neural Netw. 95, 134–142 (2017)
Podlubny, I.: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications, vol. 198. Academic Press, San Diego (1998)
Li, Y., Chen, Y., Podlubny, I.: Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 45(8), 1965–1969 (2009)
Aguila-Camacho, N., Duarte-Mermoud, M.A., Gallegos, J.A.: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19(9), 2951–2957 (2014)
Liu, H., Li, S., Li, G., Wang, H.: Adaptive controller design for a class of uncertain fractional-order nonlinear systems: an adaptive fuzzy approach. Int. J. Fuzzy Syst. 20(2), 366–379 (2018)
Petráš, I.: A note on the fractional-order Chua’s system. Chaos Solitons Fractals 38(1), 140–147 (2008)
Liu, L., Liu, C., Zhang, Y.: Experimental verification of a four-dimensional Chua’s system and its fractional order chaotic attractors. Int. J. Bifurc. Chaos 19(08), 2473–2486 (2009)
Acknowledgements
Not applicable.
Funding
This work is supported by the National Natural Science Foundation of China (Grant no. 11701320), the Natural Science Foundation of Anhui Province of China (Grant no. 1808085MF181), and the Natural Science Foundation for the Higher Education Institutions of Anhui Province of China (Grant No. KJ2018A0470).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors conceived of the study, participated in its design and coordination, read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Li, G., Sun, C. Adaptive neural network backstepping control of fractional-order Chua–Hartley chaotic system. Adv Differ Equ 2019, 148 (2019). https://doi.org/10.1186/s13662-019-2099-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2099-z