
Abstract
Dual-mode \((2+1)\)-dimensional Kadomtsev–Petviashvili (DMKP) equation is a new model which represents the spread of two simultaneously directional waves due to the involved term “\(u_{tt}(x,y,t)\)” in its equation. We present the construction of DMKP and search for possible solutions. The innovative tanh-expansion method and Kudryashov technique will be utilized to find the necessary constraint conditions which guarantee the existence of soliton solutions to DMKP. Supportive 3D plots will be provided to validate our findings.
Similar content being viewed by others

1 Introduction
Dual-mode type is a new family of nonlinear partial differential equations which fall in the following form: [1, 2]
where \(N(y,y_{x},\ldots)\) and \(L(y_{kx}) : k\geq2\) are the nonlinear and linear terms involved in the equation. \(y(x,t)\) is the unknown field-function, \(s>0\) is the phase velocity, \(\vert \beta \vert \leq1\), \(\vert \alpha \vert \leq1\), β is the dispersion parameter, and α is the parameter of nonlinearity. With \(s=0\) and integrating with respect to t, the dual-mode problem is reduced to a partial differential equation of the first order in time t.
A few dual-mode models have been established and studied. In [3,4,5,6,7,8], authors extracted abundant soliton solutions for the second-order KdV. [9, 10] established the dual-mode Burgers and fourth-order Burgers and obtained multiple soliton solutions by means of the simplified Hirota technique. In [11,12,13], the tanh technique and Hirota method were implemented to seek possible solutions of the two-mode coupled Burgers equation, coupled m-KdV, and coupled KdV. Finally, the dual-mode perturbed Burgers, Ostrovsky, and Schrodinger equations were established in [14, 15].
1.1 Structure of dual-mode \((2+1)\)-dimensional Kadomtsev–Petviashvili
The Kadomtsev–Petviashvili (KP) equation reads [16, 17]
where \(W=W(x,y,t)\). It models three connected aspects: weakly dispersive, longer wave length compared with its wave amplitude, and slower variation in y-coordinate compared with its propagation in x-coordinate. σ gives the strength of the surface tension, strong with \(\sigma>0\) and weak if \(\sigma<0\).
To derive the dual-mode version of KP, we apply the operator \(N=(\frac{\partial}{\partial t}-\alpha_{1} s \frac{\partial }{\partial x}-\alpha_{2} s \frac{\partial}{\partial y})\) to the nonlinear terms of (1.2) and the operator \(L=(\frac{\partial}{\partial t}-\beta_{1} s \frac{\partial}{\partial x}-\beta_{2} s \frac{\partial}{\partial y})\) to the linear terms, i.e.,
\(\alpha_{1}\), \(\alpha_{2}\) are the nonlinearity parameters, \(\beta_{1}\), \(\beta_{2}\) are the dispersive parameters, and s is the phase velocity.
We aim in this work to seek possible soliton solutions for (1.3) and study graphically the effects of the aforementioned parameters on the propagations of the obtained dual waves such model possesses.
2 Solutions of DMKP by tanh-expansion technique
First, we use the new variable \(z=a x+ b y -c t\) to convert (1.3) into the following reduced differential equation:
where \(W=W(z)\). Balancing \(W^{2}\) with \(W''\) in tanh technique sense [18, 19], the solution of (2.1) is
To determine the values of \(A_{1}\), \(A_{2}\), \(A_{3}\), a, b, and c, we substitute (2.2) in (2.1) and apply the identity \(\operatorname {sech}^{2}(z)=1-\tanh^{2}(z)\) to get a polynomial of tanh function. Setting the coefficient of the same power of tanh to zero, we obtain the following non-algebraic system:
We study the solution of the above system via compatible constraint relations:
For \(\alpha_{1}=\alpha_{2}=\beta_{1}=\beta_{2}=\gamma\) with \(|\gamma|<1\), we get two solution sets.
2.1 The first solution set
Therefore, the resulting dual-wave solution of DMKP (1.3) is
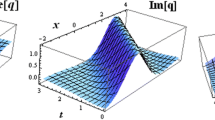
where \(\frac{1}{\sqrt{2}}< | \gamma|<1\). Figure 1 shows the proximity of the two waves with increasing the phase velocity s and fixing γ. Figure 2 shows the extent of convergence and spacing of the two waves by the sign of γ and fixing s.

3D plots of the dual waves \(W(x,y,t)\) and the impact of phase velocity s on its propagating

3D plots of the dual waves \(W(x,y,t)\) and the impact of linearity-dispersive parameter γ on its propagating
2.2 The second solution set
Therefore, the resulting dual-wave solution of DMKP (1.3) is
where \(\frac{1}{\sqrt{2}}< | \gamma| <1\). Figure 3 shows the shape of the obtained solution described in (2.7).

3D plots of the first wave, second wave, and dual waves for \(W(x,y,t)\) given in (2.7)
3 Solutions of DMKP by Kudryashov expansion technique
It is to be noted that the tanh solution obtained in the preceding section is σ-independent and, therefore, using another method to study the solution of DMKP is needed. We use here the Kudryashov technique where the solution takes the following form [20, 21]:
The variable Y satisfies the differential equation
Solving (3.2) gives
The index n to be determined by applying order-balance procedure between \(W^{2}\) and \(W''\) appears in (2.1). Thus, \(n=2\) and accordingly we write (3.1) as
Differentiating both (3.2) and (3.4) implicitly leads to
and
Now, we insert (3.2) through (3.6) in (2.1) to get a polynomial in Y. By setting each coefficient of \(Y^{i}\) to zero, a nonlinear algebraic system is obtained. Seeking a solution to this system, we get
Therefore, a new solution of DMKP (1.3) is
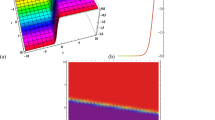
Figures 4 and 5 provide 3D plots of the Kudryashov solutions when \(\sigma> 0\) and \(\sigma<0\), respectively.

3D soliton solution of \(W(x,y,t)\) given in (3.8) when \(\sigma=2\) and respectively \(t=1\) and \(t=2\). The other assigned values are \(a=b=d=1\), \(k=e\), \(\gamma=\frac{1}{2}\)

3D soliton solution of \(W(x,y,t)\) given in (3.8) when \(\sigma=-2\) and respectively \(t=1\) and \(t=2\). The other assigned values are \(a=b=d=1\), \(k=e\), \(\gamma=\frac{1}{2}\)
4 Conclusion
A new dual-mode Kadomtsev–Petviashvili (DMKP) equation is introduced. This model describes the spread of two simultaneously directional waves. We have studied possible solutions for DMKP and obtained the following findings:
-
σ-independent tanh soliton solution is obtained for the DMKP.
-
σ-dependent Kudryashov soliton solution is obtained for the DMKP.
-
The above two solutions exist when \(\alpha_{1}=\alpha_{2}=\beta_{1}=\beta_{2}=\gamma\) with \(\frac{1}{\sqrt{2}} < |\gamma|< 1\).
Also, a graphical analysis is provided to show the impact of both linearity-dispersive parameter γ and the phase velocity s on the spread of the obtained dual waves for DMKP.
References
Korsunsky, S.V.: Soliton solutions for a second-order KdV equation. Phys. Lett. A 185, 174–176 (1994)
Wazwaz, A.M.: Multiple soliton solutions and other exact solutions for a two-mode KdV equation. Math. Methods Appl. Sci. 40(6), 1277–1283 (2017)
Xiao, Z.J., Tian, B., Zhen, H.L., Chai, J., Wu, X.Y.: Multi-soliton solutions and Bäcklund transformation for a two-mode KdV equation in a fluid. Waves Random Complex Media 27(1), 1–14 (2017)
Lee, C.T., Liu, J.L.: A Hamiltonian model and soliton phenomenon for a two-mode KdV equation. Rocky Mt. J. Math. 41(4), 1273–1289 (2011)
Lee, C.C., Lee, C.T., Liu, J.L., Huang, W.Y.: Quasi-solitons of the two-mode Korteweg–de Vries equation. Eur. Phys. J. Appl. Phys. 52, Article ID 11301 (2010)
Lee, C.T., Lee, C.C.: On wave solutions of a weakly nonlinear and weakly dispersive two-mode wave system. Waves Random Complex Media 23, 56–76 (2013)
Hong, W.P., Jung, Y.D.: New non-traveling solitary wave solutions for a second-order Korteweg–de Vries equation. Z. Naturforsch. 54 a, 375–378 (1999)
Alquran, M., Jarrah, A.: Jacobi elliptic function solutions for a two-mode KdV equation. J. King Saud Univ., Sci. (2017). https://doi.org/10.1016/j.jksus.2017.06.010
Wazwaz, A.M.: A two-mode Burgers equation of weak shock waves in a fluid: multiple kink solutions and other exact solutions. Int. J. Appl. Comput. Math. (2016). https://doi.org/10.1007/s40819-016-0302-4
Wazwaz, A.M.: Two-mode Sharma–Tasso–Olver equation and two-mode fourth-order Burgers equation: multiple kink solutions. Alex. Eng. J. (2017). https://doi.org/10.1016/j.aej.2017.04.003
Syam, M., Jaradat, H.M., Alquran, M.: A study on the two-mode coupled modified Korteweg–de Vries using the simplified bilinear and the trigonometric-function methods. Nonlinear Dyn. 90(2), 1363–1371 (2017)
Jaradat, H.M., Syam, M., Alquran, M.: A two-mode coupled Korteweg–de Vries: multiple-soliton solutions and other exact solutions. Nonlinear Dyn. 90(1), 371–377 (2017)
Alquran, M., Jaradat, H.M., Syam, M.: A modified approach for a reliable study of new nonlinear equation: two-mode Korteweg–de Vries–Burgers equation. Nonlinear Dyn. 91(3), 1619–1626 (2018)
Jaradat, I., Alquran, M., Ali, M.: A numerical study on weak-dissipative two-mode perturbed Burgers and Ostrovsky models: right–left moving waves. Eur. Phys. J. Plus 133, Article ID 164 (2018)
Jaradat, I., Alquran, M., Momani, S., Biswas, A.: Dark and singular optical solutions with dual-mode nonlinear Schrodinger’s equation and Kerr-law nonlinearity. Optik 172, 822–825 (2018)
Fokou, M., Kofane, T.C., Mohamadou, A., Yomba, E.: Two-dimensional third- and fifth-order nonlinear evolution equations for shallow water waves with surface tension. Nonlinear Dyn. 91(2), 1177–1189 (2018)
Kadomtsev, B.B., Petviashvili, V.I.: On the stability of solitary waves in weakly dispersing media. Sov. Phys. Dokl. 15, 539–541 (1970)
Alquran, M., Al-Khaled, K.: Sinc and solitary wave solutions to the generalized Benjamin–Bona–Mahony–Burgers equations. Phys. Scr. 83, Article ID 065010 (2011)
Alquran, M., Al-Khaled, K.: The tanh and sine–cosine methods for higher order equations of Korteweg–de Vries type. Phys. Scr. 84, Article ID 025010 (2011)
Kudryashov, N.A.: One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 17(6), 2248–2253 (2012)
Wang, L., Shen, W., Meng, Y., Chen, X.: Construction of new exact solutions to time-fractional two-component evolutionary system of order 2 via different methods. Opt. Quantum Electron. 50, Article ID 297 (2018)
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The authors declare that this study was accomplished in collaboration with the same responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that there is no conflict of interests regarding the publication of the paper.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Abu Irwaq, I., Alquran, M., Jaradat, I. et al. New dual-mode Kadomtsev–Petviashvili model with strong–weak surface tension: analysis and application. Adv Differ Equ 2018, 433 (2018). https://doi.org/10.1186/s13662-018-1893-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1893-3