
Abstract
In this paper, we consider a modified predator–prey model with Michaelis–Menten-type predator harvesting and diffusion term. We give sufficient conditions to ensure that the coexisting equilibrium is asymptotically stable by analyzing the distribution of characteristic roots. We also study the Turing instability of the coexisting equilibrium. In addition, we use the natural growth rate \(r_{1}\) of the prey as a parameter and carry on Hopf bifurcation analysis including the existence of Hopf bifurcation, bifurcation direction, and the stability of the bifurcating periodic solution by the theory of normal form and center manifold method. Our results suggest that the diffusion term is important for the study of the predator–prey model, since it can induce Turing instability and spatially inhomogeneous periodic solutions. The natural growth rate \(r_{1}\) of the prey can also affect the stability of positive equilibrium and induce Hopf bifurcation.
Similar content being viewed by others

1 Introduction
In nature, predation relationship plays a very important role in ecosystems. Many scholars studied predator–prey dynamic models and developed them in many ways [1–9]. Bian et al. [10] proposed a stochastic prey–predator system in a polluted environment with Beddington–DeAngelis functional response and derived sufficient conditions for the existence of boundary periodic solutions and positive periodic solutions. Zhuo and Zhang [11] considered a discrete ratio-dependent predator–prey model and obtained a new sufficient condition to ensure that the positive equilibrium is globally asymptotically stable. Liu et al. [12] proposed an impulsive stochastic infected predator–prey system with Lévy jumps and delays, and investigated the effects of time delays and impulse stochastic interference on dynamics of this predator–prey model. Liu and Cheng [13] proposed a prey–predator model with square-root response function under a state-dependent impulse and analyzed the existence, uniqueness, and attractiveness of the order-1 periodic solution.
Bifurcation phenomenon is widespread in the ecosystem, and it arouses a strong interest of researchers [14–19]. Ruan et al. [20] carried out the bifurcation analysis for a predator–prey model and showed various kinds of bifurcation phenomenon, such as the saddle-node bifurcation, the supercritical Hopf bifurcation, the homoclinic bifurcation, and so on. Huang et al. [14] considered a delayed fractional-order predator–prey model with two-competitor and nonidentical orders, focusing on the Hopf bifurcation. Jiang and Wang [15] studied global Hopf bifurcation of a predator–prey model by using the time delay as a bifurcating parameter.
Population dynamics of the predator–prey model with harvesting has been studied widely by some scholars [21–24], who suggested that the harvesting term was closely related to the long-termed stability of the population. May et al. [25] proposed the following model to describe the interaction of predator and prey with harvesting term:
where x and y represent the densities of prey and predator at time t, respectively. All parameters involved with the model are positive, \(r_{1}\) and K are the natural growth rate and carrying capacity of the prey lacking natural predators, respectively, a represents the maximum at which per capita reduction rate of the prey x can reach, \(r_{2} \) plays a role of the natural growth rate of predators, bx is the carrying capacity the predators rely on the prey, and \(H_{1} \) and \(H_{2} \) represent the effects of the harvesting to preys and predators, respectively.
Based on model (1.1), Hu and Cao [26] proposed model (1.2) with Michaelis–Menten-type predator harvesting as follows:
The term \(\frac{qEy}{cE + ly}\) is the Michaelis–Menten-type harvesting, and E, p, c, and l are positive parameters. Hu and Cao [26] considered saddle-node bifurcation, transcritical bifurcation, Hopf bifurcation, and Bogdanov–Takens bifurcation, and suggested that the Michaelis–Menten-type harvesting was more realistic and reasonable than the constant-yield harvesting and constant effort harvesting.
In real word, diffusion phenomenon widely exists. For example, predators and their preys distribute inhomogeneously in different spatial locations at time t. To survive better, they move from a place with high competitive pressure to the place with small pressure. Compared with predator–prey models without diffusion (ordinary differential equation (ODE) type predator–prey models), the diffusion can induce more complex phenomena, such as Turing instability, spatially inhomogeneous periodic solutions, and pattern formation [27–31]. Inspired by these works, we consider the following predator–prey model with diffusion term:
where \(d_{1}>0 \) and \(d_{2}>0 \) are the diffusion coefficients of prey and predator, respectively, \(u(x,t)\) and \(v(x,t)\) represent the densities of prey at position x and time t. The carrying capacity of the predator, denoted as β, is proportional to the prey and other food. The boundary condition is the Neumann boundary condition based on the hypothesis that the region is closed and with no prey and predator species entering and leaving the region at the boundary.
To simplify model (1.3), denote \(s = \frac{a}{r_{1} }\), \(m = \frac{cEr_{2} }{qE}\), and \(h = \frac{lr_{2} }{qE}\). Then system (1.3) can be rewritten as
The rest of this paper is organized as follows. In Sect. 2, we study the local stability and Turing instability of the positive equilibrium of system (1.4). In Sect. 3, we investigate the existence and property of Hopf bifurcation. In Sect. 4, we give some numerical simulations. In Sect. 5, we give a short conclusion.
2 Stability analysis of equilibria
2.1 Existence of equilibria
Now, we discuss the existence of equilibrium of system (1.4). The equilibrium of system (1.4) is satisfied:
According to the first equation in Eq. (2.1), we have
If \(u \in ( {0,K} ) \), then \(v > 0\). Thus system (1.4) has a positive equilibrium \(p = ( {u_{0} ,v_{0} } ) \). From Eqs. (2.1) and (2.2) we have
where
Denote
It is easy to see that \(\varphi (0) = - \alpha_{2} \) and \(\varphi (K) = \frac{ - ( {m - 1} ) K^{2}s^{2}(blK + \beta )}{h ( {1 + bKs} ) }\).
Now, let us discuss \(\varphi (u)\) with \(u \in ( {0,K} ) \) in two cases.
Case 1: \(m > 1\). In this case, we have \(\varphi (K) < 0\) under \(\varphi (0) = - \alpha_{2} > 0\), and thus Eq. (2.4) has a unique root, whereas \(\varphi (K) > 0\) under \(\varphi ( 0 ) = - \alpha_{2} > 0\), and thus Eq. (2.4) has no roots.
Case 2: \(m < 1\). In this case, if \(\varphi ( 0 ) = - \alpha_{2} > 0\), then we get that \(\varphi (K) > 0\) and \(\varphi (u)\) has two roots or no root, whereas if \(\varphi (0) = - \alpha_{2} < 0\), then it has a unique root.
Based on this analysis, if \(( {m - 1} ) \alpha_{2} < 0\), then system (1.4) has a unique positive equilibrium \(P ( {u_{0} ,v_{0} } ) \). So, we always assume that system (1.4) has a positive equilibrium \(P ( {u_{0} ,v_{0} } ) \) in the following discussion.
2.2 Stability analysis of \(P ( {u_{0} ,v_{0} } ) \)
To study the stability analysis of \(P ( {u_{0} ,v_{0} } ) \), we analyze the distribution of characteristic roots as is done in [32]. Now, we consider the characteristic equation of system (1.4). Define the real-valued Sobolev space
and the complexification of X:
The linearized system of (1.4) at \((u_{0},v_{0})\) has the form
where \(a_{1}\), \(a_{2}\), \(b_{1}\), and \(b_{2}\) are defined in (2.5). Then the linearized operator of the steady-state system of (1.4) evaluated at \((u_{0},v_{0})\) is
with the domain \(D_{L(s)}=\mathbf{X_{\mathbb{C}}}\) and
It is well known that the eigenvalue problem
has the eigenvalues \(\mu_{n}=\frac{n^{2}}{l^{2}}\) (\(n=0,1,\ldots\)) with the corresponding eigenfunctions \(\varphi_{n}(x)=\cos \frac{n\pi }{l}\). Let
be the eigenfunction of \(L(\rho )\) corresponding to an eigenvalue \(\beta (\rho )\), that is,
Then from a straightforward analysis we have
where
It follows that the eigenvalues of \(L(s)\) are given by the eigenvalues of \(L_{n}(s)\) for \(n=0,1,2,\ldots \) . The characteristic equation of \(L_{n}(s)\) is
where
Thus we can obtain the eigenvalues of Eq. (2.6):
To analyze the influence of the diffusion term in model (1.4), we first study the stability of \(P ( {u_{0} ,v_{0} } ) \) for ODE model. If \(d_{1} = d_{2} = 0\), then the characteristic roots of (2.5) are given by
We know that the positive equilibrium of a system is locally asymptotically stable when its eigenvalues all have negative real parts. Therefore we can get that both \(\lambda_{1,2} \) have negative real part if and only if \({r_{2}}{b_{2}} - {r_{1}}{a_{1}} < 0\) and \(a_{2} b_{1} - a_{1} b_{2} > 0\), which are guaranteed by
- \({\mathbf{{(H_{1} })}}\) :
-
$$ r_{1}>\frac{K r_{2}}{u_{0}} \biggl( \frac{1-m-(m+h v_{0}-1)^{2}}{(m+h v_{0})^{2}} \biggr) $$
and
- \({\mathbf{{(H_{2} })}}\) :
-
$$ 1+s b K>\frac{1-m}{ (m+h _{0}-1)^{2}}, $$
respectively. Summarizing the discussion, we have the following conclusions.
Theorem 2.1
For ODE system (1.4), if \(\mathbf{{(H_{1} })}\) and \(\mathbf{{(H_{2} })}\) hold, then the positive equilibrium \(P ( {u_{0} ,v_{0} } ) \) is locally asymptotically stable.
Now, we consider Turing instability of the equilibrium \(P ( {u_{0} ,v_{0} } ) \). For Eq. (2.6), define
According to Theorem 2.1, under hypotheses \(\mathbf{{(H_{1} })}\) and \(\mathbf{{(H_{2} })}\), we have \(T(0)<0\) and \(D(0)>0\). Then \(T ( z ) \le T ( 0 ) < 0\). For \(n \ne 0\), we can gain the symmetry axis \(z_{0} \) and the discriminant Δ of \(D ( z ) \). They are given by
We consider the following two cases.
Case I: \({r_{2}}{b_{2}}{d_{1}} - {r_{1}}{a_{1}}{d_{2}} \le 0\) or \(\Delta < 0\). Then all the roots of Eq. (2.6) have negative real parts.
Case II: \({r_{2}}{b_{2}}{d_{1}} > {r_{1}}{a_{1}}{d_{2}} \) and \(\Delta > 0\). Denote the two different roots of \(D ( z ) =0\) as \(z_{1}\) and \(z_{2} \) \((z_{1} < z_{2} )\). By straightforward calculating we get \(z_{1,2} = \frac{ - ( {r_{1} a_{1} d_{2} - r _{2} b_{2} d_{1} } ) \mp \sqrt{\Delta }}{2d_{1} d_{2} }\). Then we have the following conclusions:
-
(i)
For all \(n \in N\), if \(\frac{n^{2}}{l^{2}} \notin ( {z_{1} ,z _{2} } ) \), then \(D ( n ) > 0\), and all the roots of Eq. (2.6) have negative real parts.
-
(ii)
If there exists \(k \in N\) such that \(\frac{k^{2}}{l^{2}} \in ( {z_{1} ,z_{2} } ) \), then \(D ( k ) < 0\), and Eq. (2.6) has at least one root with positive real part.
Based on this analysis, we have the following theorem.
Theorem 2.2
For PDE system (1.4), let \(\mathbf{{(H_{1} })}\) and \(\mathbf{{(H_{2} })}\) hold. Then the following statements are true.
-
(1)
In Case I, the positive equilibrium \(p ( {u_{0} ,v_{0} } ) \) is locally asymptotically stable.
-
(2)
In Case II, \(\frac{n^{2}}{l^{2}} \notin ( {z_{1} ,z_{2} } ) \) for all \(n \in N\), the positive equilibrium \(p ( {u_{0} ,v_{0} } ) \) is locally asymptotically stable.
-
(3)
In Case II, there exists \(k \in N\) such that \(\frac{k^{2}}{l^{2}} \in ( {z_{1} ,z_{2} } ) \). Then the positive equilibrium \(p ( {u_{0} ,v_{0} } ) \) is Turing instability.
3 Analysis of Hopf bifurcation
3.1 Existence of Hopf bifurcation
In the predator–prey system, considering Hopf bifurcation is of great value and significance. In this section, we mainly study the existence of Hopf bifurcation by taking \(r_{1}\) as a bifurcating parameter.
Define
where \(n_{1}^{*}\) is an integer such that \(r_{1}^{ (n)}>0\) for \(n\leq n_{1}^{*}\) and \(r_{1}^{ (n)} \le 0\) for \(n=n_{1}^{*}+1\). Obviously, \(T_{n}(r_{1}^{ (n)})=0\) and \({D_{0}} ( {r_{1}^{ ( 0 ) }} ) >0\) under hypothesis \(\mathbf{{(H_{2} })}\). Then there exists an integer \(n_{2}^{*}\geq 1\) such that \(D_{n}(r_{1}^{ (n)})>0\) when \(n \leq n_{2}^{*}\) and \(D_{n}(r_{1}^{ (n)})\leq 0\) when \(n= n_{2}^{*}+1\). Let \(n^{*}=\min \{ n_{1}^{*}, n_{2}^{*}\}\). Then Eqs. (2.6) have a part of pure imaginary roots when \(r_{1}=r_{1}^{ (n)}\) where \(n\leq n^{*}\). We assume that system (1.4) has a pair of complex eigenvalues \(\alpha ( {{r_{1}}} ) \pm i{\omega_{0}} ( {{r_{1}}} ) \) when \(r_{1}\) is near \(r_{1}^{n} \), where
Then the transversal condition is satisfied. System (1.4) undergoes Hopf bifurcation at \(r_{1} = r_{1}^{ ( n ) } \). Hence we get the following theorem.
Theorem 3.1
If \(\mathbf{{(H_{2} })}\) holds, then system (1.4) undergoes Hopf bifurcation at \(r_{1} = r_{1}^{ ( n ) } \), where \(n = 0,1,2, \ldots ,n^{*}\).
3.2 Property of Hopf bifurcation
By using the algorithm in [32] we will give parameters for determining the bifurcation direction and the stability of the bifurcating periodic solution. Here we just consider the case of \(r_{1} = r_{1}^{ ( 0 ) }\), where \({\omega_{0}} = \frac{{ 2\sqrt{ {r_{1}}{r_{2}} ( {{a_{2}}{b_{1}} - {a_{1}}{b_{2}}} ) } }}{2}\). We have
Define
By calculating we have
When \(n = 0\), by a simple computation we get
where
We have
By calculating we get \({H_{20}} = {H_{11}} = 0\), that is, \({\omega _{20}} = {\omega_{11}} = 0\). Therefore
According to [32], we get
where
Through simplification, when \(r_{1} = r_{1}^{ ( 0 ) } \), we obtain
Thus
Summarizing the discussion, we have the following conclusions.
Theorem 3.2
If \(\operatorname{Re} ( {c_{1} (r_{1}^{ ( 0 ) } )} ) < 0\) (resp. >0), Hopf bifurcation at \(r_{1} = r_{1}^{ ( 0 ) }\) toward the back (resp., ahead) and the bifurcating periodic solutions are asymptotically stable (resp., unstable).
The parameters determining the property of the bifurcation of the spatially inhomogeneous periodic solutions (at \(r_{1} = r_{1}^{ ( j ) }\)) are given in the Appendix.
4 Numerical simulations
To support the results found in the previous sections, we give some numerical simulations by Matlab. The numerical simulation of the PDE systems is implemented by pdepe function in Matlab. Fix the following parameters:
By computation, we get two positive equilibriums: \(( {u_{0} ,v _{0} } ) _{1} \approx ( {10.341,0.082} ) \) and \(( u_{0} , v_{0} ) _{2} \approx ( {26.211,0.016} ) \).
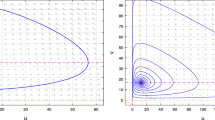
For equilibrium \({ ( {{u_{0}},{v_{0}}} ) _{2}} \approx ( {26.211,0.016} ) \), we obtain \({a_{2}}{b_{1}} - {a_{1}}{b_{2}} \approx - 0.003 < 0\), so this equilibrium is unstable by Theorem 2.1. For equilibrium \({ ( {{u_{0}},{v_{0}}} ) _{1}} \approx ( {10.341,0.082} ) \), we obtain \({b_{2}} < {a_{1}}\), \({r_{1}} {r_{2}}({a_{2}}{b_{1}} - {a_{1}}{b_{2}}) \approx 0.016 > 0\) when \(r_{1} = 0.2\), so the positive equilibrium \(p ( {{u_{0}},{v_{0}}} ) ={ ( {{u_{0}},{v_{0}}} ) _{1}}\) is locally asymptotically stable, which is shown in Fig. 1. If we choose \(r_{1} = 0.029\), due to \(r_{2} b_{2} > r_{1} a_{1} \), then we see that \(P ( {u_{0} ,v_{0} } ) \) is unstable and has a bifurcating periodic orbit.

Left: \(r_{1} = 0.200\), the positive equilibriums \(p ( {u_{0} ,v_{0} } ) \) is locally asymptotically stable. Right: \(r_{1} = 0.029\), \(p ( {u_{0},v_{0} } ) \) is unstable and has the bifurcating periodic orbit
In the following, we mainly consider the positive equilibrium \(P ( {{u_{0}},{v_{0}}} ) ={ ( {{u_{0}},{v_{0}}} ) _{1}}\) and fix the parameters in (4.1). Choose \(d_{1} = 0.01\), \(d_{2} = 0.2\), \(r_{1} =0.2\). We have \(r_{2} b_{2} d_{1} - r_{1} a_{1} d_{2} \approx - 0.014 < 0\). Then \(P ( {u_{0} ,v_{0} } ) \) is locally asymptotically stable by Theorem 2.2, which is shown in Fig. 2.

For the positive equilibrium \(p ( {{u_{0}},{v_{0}}} ) ={ ( {{u_{0}},{v_{0}}} ) _{1}}\), we choose \(d_{1} = 2\), \(d _{2} = 0.001\), \(r_{1} =0.2\). By Theorem 2.2 we have \(z_{1} \approx 7.966\), \(z_{2} \approx 9.996\times 10^{ - 1}\), and \(4 / l^{2} = 1\), so that \(z_{1} < 4 / l^{2} < z_{2} \). Hence we have Turing instability at \(P ( {u_{0} ,v_{0} } ) \), which is shown in Fig. 3.

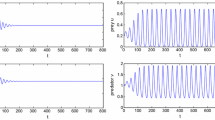
For the positive equilibrium \(p ( {{u_{0}},{v_{0}}} ) ={ ( {{u_{0}},{v_{0}}} ) _{1}}\), choose \(d_{1} = 0.006\), \(d _{2} = 0.002\). By computation we have \(r_{1}^{ ( 0 ) } \approx 0.114\) and \(\operatorname{Re} ( {{c_{1}}(r_{1} ^{ ( 0 ) })} ) \approx - 2.830 \times {10^{ - 3}} < 0\). So we conclude that the positive equilibriums \(p ( {u_{0} ,v_{0} } ) \) loses its stability, and system (1.4) undergoes a Hopf bifurcation when \(r_{1}\) crosses \(r_{1}^{ ( 0 ) }\). Moreover, the direction of the bifurcation is toward the back, and the bifurcating periodic solutions are asymptotically stable by Theorem 3.1, which is shown in Fig. 4.

5 Conclusion
In this paper, we study a modified Michaelis–Menten harvesting predator–prey model with diffusion terms. For ODE system, we get that if hypotheses \(\mathbf{{(H_{1} })}\) and \(\mathbf{{(H_{2} })}\) hold, then the positive equilibrium \(p ( {{u_{0}},{v_{0}}} ) \) is locally asymptotically stable. For PDE system (1.4), if \(r_{2} b_{2} d _{1} > r_{1} a_{1} d_{2} \) and \(\Delta > 0\), then there exists \(k \in N\) such that \(\frac{k^{2}}{l^{2}} \in ( {z_{1} ,z_{2} } ) \), \(k = 0,1,2,\ldots \) , and the positive equilibrium \(p(u_{0} ,v_{0} )\) of system (1.4) has Turing instability. In addition, the positive equilibrium \(p(u_{0} ,v_{0} )\) is locally asymptotically stable under other conditions. Finally, we analyze Hopf bifurcation and find that if hypothesis \(( \mathbf{H_{2}} ) \) holds, then Hopf bifurcation occurs at \(r_{1} = r_{1}^{ ( j ) } \). Moreover, if \(\operatorname{Re} ( {c_{1}(r_{1}^{ ( j ) } )} ) < 0\) (resp. >0), then Hopf bifurcation is toward the back (resp., ahead), and the bifurcating periodic solutions are asymptotically stable (resp., unstable).
References
Wang, J., Cheng, H., Meng, X., et al.: Geometrical analysis and control optimization of a predator–prey model with multi state-dependent impulse. Adv. Differ. Equ. 2017(1), Article ID 252 (2017)
Zhang, S., Meng, X., Feng, T., et al.: Dynamics analysis and numerical simulations of a stochastic non-autonomous predator–prey system with impulsive effects. Nonlinear Anal. Hybrid Syst. 26, 19–37 (2017)
Way, T.S.: Existence and Attractiveness of Order One Periodic Solution of a Holling I Predator–Prey Model. Abstr. Appl. Anal. 2012(1), Article ID 126018 (2013). https://doi.org/10.1155/2012/126018
Cheng, H., et al.: Multi-state dependent impulsive control for Holling I predator–prey model. Discrete Dyn. Nat. Soc. 2012, Article ID 181752 (2012)
Zhang, T., Meng, X., Song, Y., et al.: A stage-structured predator–prey SI model with disease in the prey and impulsive effects. Math. Model. Anal. 18(4), 505–528 (2013)
Meng, X., Zhao, S., Zhang, W.: Adaptive dynamics analysis of a predator–prey model with selective disturbance. Appl. Math. Comput. 266, 946–958 (2015). https://doi.org/10.1016/j.amc.2015.06.020
Meng, X., Stochastic, W.X.: Predator–prey system subject to Lévy jumps. Discrete Dyn. Nat. Soc. 2016, 1–13 (2016)
Wang, J., Cheng, H., Li, Y., et al.: The geometrical analysis of a predator–prey model with multi-state dependent impulses. J. Appl. Anal. Comput. 8(2), 427–442 (2018)
Ling, Z., Zhang, L., Zhu, M., et al.: Dynamical behaviour of a generalist predator–prey model with free boundary. Bound. Value Probl. 2017(1), Article ID 139 (2017)
Bian, F., Zhao, W., Song, Y., et al.: Dynamical analysis of a class of prey–predator model with Beddington–Deangelis functional response, stochastic perturbation, and impulsive toxicant input. Complexity 2017(3), 1–18 (2017)
Zhuo, X.L., Zhang, F.X.: Stability for a new discrete ratio-dependent predator–prey system. Qual. Theory Dyn. Syst. 17(1), 1–14 (2017)
Liu, G., Wang, X., Men, X., et al.: Extinction and persistence in mean of a novel delay impulsive stochastic infected predator–prey system with jumps. Complexity 2017, Article ID 1950970 (2017)
Liu, H., Cheng, H.: Dynamic analysis of a prey–predator model with state-dependent control strategy and square root response function. Adv. Differ. Equ. 2018(1), Article ID 63 (2018)
Huang, C., Cao, J., Xiao, M., Alsaedi, A., Alsaadi, F.E.: Controlling bifurcation in a delayed fractional predator–prey system with incommensurate orders. Appl. Math. Comput. 293, 293–310 (2017). https://doi.org/10.1016/j.amc.2016.08.033
Jiang, Z., Wang, L.: Global Hopf bifurcation for a predator–prey system with three delays. Int. J. Bifurc. Chaos 27(7), Article ID 1750108 (2017). https://doi.org/10.1142/S0218127417501085
Huang, C., Cao, J., Xiao, M., et al.: Effects of time delays on stability and Hopf bifurcation in a fractional ring-structured network with arbitrary neurons. Commun. Nonlinear Sci. Numer. Simul. 57, 1–13 (2018). https://doi.org/10.1016/j.cnsns.2017.09.005
Zhang, T., Ma, W., Meng, X., et al.: Periodic solution of a prey–predator model with nonlinear state feedback control. Appl. Math. Comput. 266, 95–107 (2015)
Huang, C., Cao, J.: Impact of leakage delay on bifurcation in high-order fractional BAM neural networks. Neural Netw. 98, 223–235 (2017)
Wang, Z., Wang, X., Li, Y., et al.: Stability and Hopf bifurcation of fractional-order complex-valued single neuron model with time delay. Int. J. Bifurc. Chaos 27(13), Article ID 1750209 (2017). https://doi.org/10.1142/S0218127417502091
Ruan, S., Xiao, D.: Global analysis in a predator-prey system with nonmonotonic functional response. SIAM J. Appl. Math. 61(4), 1445–1472. 200. https://doi.org/10.1137/S0036139999361896
Wang, J., Cheng, H., Liu, H., et al.: Periodic solution and control optimization of a prey–predator model with two types of harvesting. Adv. Differ. Equ. 2018, Article ID 41 (2018)
Yuan, R., Jiang, W., Wang, Y.: Saddle-node-Hopf bifurcation in a modified Leslie–Gower predator–prey model with time-delay and prey harvesting. J. Math. Anal. Appl. 422(2), 1072–1090 (2015)
Wang, J., Cheng, H., Liu, H., et al.: Periodic solution and control optimization of a prey–predator model with two types of harvesting. Adv. Differ. Equ. 2018, Article ID 41 (2018)
Chen, B., Chen, J.: Complex dynamic behaviors of a discrete predator–prey model with stage structure and harvesting. Int. J. Biomath. 10(1), 233–257 (2017)
May, R.M., Beddington, J.R., Clark, C.W., Holt, S.J., Laws, R.M.: Management of multispecies fisheries. Science 205(4403), 267–277 (1979). https://doi.org/10.1126/science.205.4403.267
Hu, D., Cao, H.: Stability and bifurcation analysis in a predator–prey system with Michaelis–Menten type predator harvesting. Nonlinear Anal., Real World Appl. 33, 58–82 (2017)
Yang, W.: Dynamical behaviors of a diffusive predator-prey model with Beddington–DeAngelis functional response and disease in the prey. Int. J. Biomath. 10, Article ID 1750119 (2017)
Ghorai, S., Poria, S.: Impacts of additional food on diffusion induced instabilities in a predator–prey system with mutually interfering predator. Chaos Solitons Fractals 103, 68–78 (2017)
Li, C.: Existence of positive solution for a cross-diffusion predator–prey system with Holling type-II functional response. Chaos Solitons Fractals 99, 226–232 (2017)
Zhang, T., Jin, Y.: Traveling waves for a reaction–diffusion–advection predator–prey model. Nonlinear Anal., Real World Appl. 36, 203–232 (2017). https://doi.org/10.1016/j.nonrwa.2017.01.011
Sambath, M., Balachandran, K., Guin, L.N.: Spatiotemporal patterns in a predator–prey model with cross-diffusion effect. Int. J. Bifurc. Chaos 28(2), Article ID 1830004 (2018). https://doi.org/10.1142/S0218127418300045
Yi, F., Wei, J., Shi, J.: Bifurcation and spatiotemporal patterns in a homogeneous diffusive predator–prey system. J. Differ. Equ. 246(5), 1944–1977 (2009)
Acknowledgements
The authors wish to express their gratitude to the editors and the reviewers for their helpful comments.
Funding
This research is supported by the National Nature Science Foundation of China (No. 11601070), the Fundamental Research Funds for the Central Universities (No. 2572018BC01), and Heilongjiang Provincial Natural Science Foundation (No. A2018001).
Author information
Authors and Affiliations
Contributions
The idea of this research was introduced by QS and RY. All authors contributed to the main results and numerical simulations. LT contributed to revise the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Bifurcation direction of the spatially inhomogeneous periodic solutions
Appendix: Bifurcation direction of the spatially inhomogeneous periodic solutions
In this appendix, we study the bifurcation of the spatially inhomogeneous periodic solutions given in Theorem 3.1. We calculate \(\operatorname{Re} ( {{c_{1}}(r_{1}^{(j)})} ) \) for \(j= 1, 2,\ldots , n_{0}^{*}\). Denote \(r_{1}=r_{1}^{(j)}\), where \(r_{1}^{(j)}\) is defined in (3.1). We get \({\omega_{j}} = \sqrt{ {D_{j}}(r_{1}^{(j)})}\), where \({D_{j}}(r_{1}^{(j)})\) is given in (2.7). We set
and
By straightforward calculation we have
with
and
with
Then we get
where
and \({f_{uu}}\), \({f_{uv}}\), \({f_{vv}}\), \({g_{uu}}\), \({g_{uv}}\), \({g_{vv}}\), \({f_{uuu}}\), \({f_{uuv}}\), \({f_{uvv}}\), \({f_{vvv}}\), \({g_{uuu}}\), \({g_{uuv}}\), \({g_{uvv}}\), and \({g_{vvv}}\) are given in (3.6). Then we have
with
For any \(j \in N\), we notice that
Then we get
and \(\langle {{q^{*} },{C_{q,q,\bar{q}}}} \rangle = \frac{ {3l\pi }}{8} ( {{{\bar{a}}_{j}}^{*}{g_{j}} + {{\bar{b}}_{j}}^{*} {h_{j}}} ) \). For any \(j \in N\), it follows that \(\langle {{q ^{*} },{Q_{qq}}} \rangle = \langle {{q^{*} },{Q_{q\bar{q}}}} \rangle = 0\). By (3.11) we have
Thus, when \(c_{j}\) \((r_{1}^{j} ) > 0\) (resp., <0), the bifurcating periodic solution toward the back (resp., ahead) and the bifurcating periodic solutions are asymptotically stable (resp., unstable).
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Song, Q., Yang, R., Zhang, C. et al. Bifurcation analysis in a diffusive predator–prey system with Michaelis–Menten-type predator harvesting. Adv Differ Equ 2018, 329 (2018). https://doi.org/10.1186/s13662-018-1741-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1741-5