
Abstract
A Crank-Nicolson scheme catering to solving initial-boundary value problems of a class of variable-coefficient tempered fractional diffusion equations is proposed. It is shown through theoretical analysis that the scheme is unconditionally stable and the convergence rate with respect to the space and time step is \(\mathcal{O}(h^{2} +\tau^{2})\) under a certain condition. Numerical experiments are provided to verify the effectiveness and accuracy of the scheme.
Similar content being viewed by others

1 Introduction
This paper is concerned with numerical methods for solving the following initial-boundary value problem of tempered fractional diffusion equations (tempered-FDEs):
where \(f(x, t)\) is the source term, \(d(x)\geq0\) is the diffusion coefficient functions, the parameters \(\kappa_{1}\geq0\), \(\kappa_{2} \geq0\) are skewed parameters that control the bias of the dispersion, see Benson et al. [1], and λ is non-negative. Here, the \({_{a}}{\mathbf {D}}_{x}^{{\alpha},\lambda}u(x,t)\) and \({_{x}} {\mathbf {D}}_{b}^{{\alpha},\lambda}u(x,t)\) represent the left and right Riemann-Liouville tempered fractional derivatives of the function \(u(x,t)\) with order α (\(1<\alpha<2\)), respectively, defined by (see Baeumera and Meerschaert [2])
and
where
and
where \(\Gamma(\cdot)\) denotes the gamma function, and \(\partial_{x}\) is the first order partial differential operator with respect to x. Truly, when \(\lambda=0\), it reduces to the αth order left and right Riemann-Liouville fractional derivatives of \(u(x)\), respectively, then the above equation (1) reduces to fractional diffusion equations (FDEs).
From the existing literature, tempered-FDEs (1) is an exponentially-tempered extension of FDEs, which has proven to be an excellent tool in capturing some rare or extreme events in geophysics [2–4] and finance [5, 6]. For the FDEs problems, there are a variety of numerical schemes, and their fast algorithms developed extensively in the past decades. We refer readers to [7–16] and the references therein for the recent progress in these problems. In recent years, Deng’s group have further derived some high order difference approximations for the left and right Riemann-Liouville tempered fractional derivatives in [17], and their results have been an interest in the numerical simulation of the tempered fractional Black-Scholes equation for European double barrier option [18]. Moreover, the tempered fractional diffusion models are also used to simulate exponential tempering of the power-law jump length of the continuous time random walk and the Fokker-Planck equation of the new stochastic process, see [19, 20]. However, in these cases, the diffusion coefficients are usually constants, few papers have focused on the tempered fractional diffusion model with variable coefficients. Therefore, it is the aim of this paper to derive a class of variable-coefficient tempered fractional diffusion models.
The paper is organized as follows. In Section 2, we apply the Crank-Nicolson discretization for the tempered-FDEs, and the desired order in space and time is obtained. In Section 3, it is shown that the method is unconditionally stable and convergent. Numerical examples are presented in Section 4 to verify our theoretical analysis. Finally, Section 5 presents the conclusion.
2 The Crank-Nicolson discretization for the tempered fractional diffusion equations
To develop the Crank-Nicolson scheme for problem (1), we let \(h = \frac{b-a}{N+1}\) and \(\tau= \frac{T}{M}\) be the space step and time step respectively, where N, M are some given positive integers. Then the spatial and temporal partitions can be defined by \(x_{i} = a + i h\), \(i=0, 1, \ldots, N+1\) and \(t_{m} = m\tau\), \(m = 0, 1 , \ldots, M\). Next, for convenience, we introduce the following notation:
Note that Li and Deng [17] have established a second order tempered-WSGD operators \({_{a}}\mathfrak{D}_{x}^{\alpha,\lambda}\) and \({_{x}}\mathfrak{D}_{b}^{\alpha,\lambda}\) to approximate the left and right Riemann-Liouville tempered fractional derivatives of \(u(x)\) at point \(x_{i}\), respectively, which gives
and
where \(\phi({\lambda})=(\gamma_{1}e^{h\lambda}+\gamma_{2}+\gamma _{3}e^{-h\lambda})(1-e^{-h\lambda})^{\alpha}\), and the weights \(g_{k}^{(\alpha)}\) are given as
Here the weights \(w_{0}^{(\alpha)}=1\) and \(w_{k}^{(\alpha )}=(-1)^{k}\binom{\alpha}{k}\) can be evaluated recursively, i.e., \(w_{k}^{(\alpha)}= (1-\frac{1+\alpha}{k} )w_{k-1}^{(\alpha)}\) for all \(k\geq1\), see[7]. It is worth mentioning that the parameters \(\gamma_{i}\) (\(i=1,2,3\)) satisfy the linear system
Note that there are infinite many solutions of linear system (3). However, the rank the coefficient matrix is 2 so that a solution can be uniquely determined when one of \(\gamma_{i}\) is provided. They can be collected by the following three sets:
or
or
We remark that the above approach used to approximate the left and right Riemann-Liouville tempered fractional derivatives is simply a follow-up used by Li and Deng [17]. Our main contributions to this paper are to derive a Crank-Nicolson scheme for a class of variable-coefficient tempered-FDEs and to illustrate the stability and convergence of this scheme.
Let \(u^{m}_{i} \approx u(x_{i},t_{m})\), we can therefore consider the Crank-Nicolson technique to the tempered-FDEs (1) with the tempered-WSGD approximations to the tempered fractional derivatives and the second order central difference approximation to \(\frac{\partial u}{\partial x}\), see [17, 21]. Then, neglecting the truncation errors, we derive the following second order finite difference scheme:
for \(i=1, 2,\ldots, N\) and \(m=1, 2, \ldots, M-1\). We denote \(\varepsilon =\frac{\tau}{2h^{\alpha}}\geq0\), \(\eta=\frac{\alpha\lambda^{\alpha -1}\tau}{4h}\geq0\). In a matrix form, it is given as
in which
where \(D=\operatorname {diag}(d_{1}, d_{2},\ldots,d_{N})\), \(u^{m}=[u_{1}^{m},u_{2}^{m},\ldots,u_{N}^{m}]^{T}\), \(f^{m+\frac{1}{2}}=[f_{1}^{m+\frac {1}{2}}, f_{2}^{m+\frac{1}{2}}, \ldots,f_{N}^{m+\frac{1}{2}}]^{T}\), the tridiagonal matrix \(W=\operatorname {tridiag}(-1, 0,1)\), I is the identity matrix, and \(G\equiv[g_{i,j}]\) is an \(N\times N\) Toeplitz matrix defined as
3 Stability and convergence of the Crank-Nicolson finite difference scheme
To show the unconditional stability and convergence of the Crank-Nicolson finite difference scheme (4), the following results given in [17, 22–24] are required.
Lemma 1
Li and Deng [17]
Let \({\mathcal {S}}\) be the solution set of linear system (3). If \(1<\alpha<2\), \(\lambda\geq0\), \((\gamma_{1},\gamma _{2},\gamma_{3})\in{\mathcal {S}}\), and
-
1.
\(\max \{\frac{2(\alpha^{2}+3\alpha-4)}{\alpha^{2}+3\alpha +2},\frac{\alpha^{2}+3\alpha}{\alpha^{2}+3\alpha+4} \}<\gamma_{1}< \frac {3(\alpha^{2}+3\alpha-2)}{2(\alpha^{2}+3\alpha+2)}\); or
-
2.
\(\frac{(\alpha-4)(\alpha^{2}+3\alpha+2)+24}{2(\alpha^{2}+3\alpha +2)}< \gamma_{2}< \min \{\frac{(\alpha-2)(\alpha^{2}+3\alpha +4)+16}{2(\alpha^{2}+3\alpha+4)}, \frac{(\alpha-6)(\alpha^{2}+3\alpha +2)+48}{2(\alpha^{2}+3\alpha+2)} \}\); or
-
3.
\(\max \{\frac{(2-\alpha)(\alpha^{2}+\alpha-8)}{\alpha ^{2}+3\alpha+2},\frac{(1-\alpha)(\alpha^{2}+2\alpha)}{2(\alpha^{2}+3\alpha +4)} \}< \gamma_{3}< \frac{(2-\alpha)(\alpha^{2}+2\alpha-3)}{2(\alpha ^{2}+3\alpha+2)}\),
we have
and
Lemma 2
Quarteroni et al. [22]
If \(A\in\mathbb{C}^{n\times n}\), let \(H=\frac{A+A^{*}}{2}\) be the hermitian part of A, then for any eigenvalue λ of A, the real part \(\operatorname{Re}(\lambda(A))<0\) satisfies
where \(\lambda_{\min}(H)\) and \(\lambda_{\max}(H)\) are the minimum and maximum of the eigenvalues of H, respectively.
Lemma 3
Quarteroni et al. [22]
A real matrix A of order N is negative definite if and only if its symmetric part \(H=\frac{A+A^{*}}{2}\) is negative definite; H is negative definite if and only if the eigenvalues of H are negative.
Definition 1
The numerical range of matrix A is defined as
Lemma 4
Horn and Johnson [23]
Let \(A, B\in\mathbb{C}^{n\times n}\), if B is positive definite, then \(\sigma(AB) \subset\mathcal{W}(A)\mathcal{W}(B)\), where \(\sigma(AB)\) is the spectrum of AB.
Lemma 5
Quarteroni and Valli [24]; Discrete Gronwall’s inequality
Assume that \(\{k_{n}\}\) and \(\{p_{n}\} \) are non-negative sequences, and the sequence \(\{\phi_{n}\}\) satisfies
where \(c_{0}\geq0\). Then the sequence \(\{\phi_{n}\}\) satisfies
Next, we analyze the stability of finite difference scheme (5), we have the following theorem.
Theorem 1
For all \(\alpha\in(1,2)\), if the parameters \(\gamma_{1}\), \(\gamma_{2}\), and \(\gamma_{3}\) satisfy the hypothesis given in Lemma 1, then the difference scheme (5) is unconditionally stable.
Proof
Let \(\mathcal{M}:=\varepsilon\kappa_{1}G+\varepsilon\kappa _{2}G^{T}+\eta(\kappa_{2}-\kappa_{1}) W\), then \(A=D\mathcal{M}\), note that
From [17], we note that the matrix G is negative definite. Since \(\kappa_{1}\geq0\), \(\kappa_{2}\geq0\) and \(\varepsilon\geq0\), then we have \(\frac{\mathcal{M}+\mathcal{M}^{T}}{2}\) is also negative definite. Thanks to Lemma 3, the matrix \(\mathcal{M}\) is negative definite. Denote by \(\mu(A)\) an eigenvalue of \(A=D\mathcal{M}\). Since D is non-negative, combining the negative definite properties of \(\mathcal{M}\) and Lemma 4, we obtain that
Hence \(\operatorname{Re}(\mu(A))<0\), which implies that the inequality
holds for any \(\alpha\in(1, 2)\). Therefore, the numerical scheme (5) is unconditionally stable.
In the sequel, we consider the convergence of the numerical scheme (4). Let
be space grid functions defined on \(\{ x_{i}=ih\}_{i=0}^{N+1}\). For any \(u, v \in V_{h}\), we define
and the corresponding discrete \(L^{2}\) norm
□
The following theorem describes the convergence of the Crank-Nicolson method when \(A=D\mathcal{M}\) is negative definite.
Theorem 2
Let \(U_{i}^{m}\) be the exact solution of tempered-FDEs (1) and \(u_{i}^{m}\) be the solution of discrete Eq. (4) at mesh point \((x_{i}, t_{m})\), respectively, where \(i=1, 2, \ldots, N\) and \(m=1, 2, \ldots, M\). For all \(\alpha\in(1,2)\), if \(A=D\mathcal{M}\) is negative definite, and the parameters \(\gamma_{1}\), \(\gamma_{2}\), and \(\gamma_{3}\) satisfy the hypothesis given in Lemma 1, we have
where C is a positive constant, and \(U^{m}=[U_{1}^{m}, U_{2}^{m},\ldots, U_{N}^{m}]^{T}\).
Proof
For \(i=1, 2, \ldots, N\) and \(m=0, 1, 2, \ldots, M-1\), the error satisfies the following equation:
where \(e_{i}^{m}=U_{i}^{m}-u_{i}^{m}\), and \(e_{i}^{0}=0\), \(e_{0}^{m}=e_{N+1}^{m}=0\) for \(i=1,2,\ldots,N\) and \(m=1,\ldots,M-1\). Denote \(E^{m}=[e_{1}^{m},e_{2}^{m},\ldots,e_{N}^{m}]^{T}\), then the matrix form of Eq. (8) can be written as
Through arrangement, we obtain
where \(\rho^{m}=[\rho_{1}^{m},\rho_{2}^{m},\ldots,\rho_{N}^{m}]^{T}\) with \(\rho_{i}^{m}={\mathcal {O}}(h^{2}+\tau^{2})\).
Multiplying (9) by h and taking \((E^{m+1}+E^{m})^{T}\) on both sides, we have
Recall that the matrix A is negative definite, then
and from Eq. (10) we have
Summing up for all \(0\leq m \leq k-1\) (\(k=1, 2,\ldots, M\)) leads to
Since \(\rho_{i}^{m}={\mathcal {O}}(h^{2}+\tau^{2})\), it means that \(\rho _{i}^{m}\leq C(h^{2}+\tau^{2})\) for \(C>0\). It follows from Lemma 5 that
Therefore, \(\Vert E^{k} \Vert = \Vert E^{m} \Vert = \Vert U^{m}-u^{m} \Vert \leq C(h^{2}+\tau^{2})\) (\(m=1, 2,\ldots, M\)), which is the desired result. □
4 Some examples
In this section, two numerical examples are given to show the effectiveness and convergence orders of the proposed schemes. In the test, we compute the maximum norm errors between the exact and the numerical solutions at the last time step by
where \(u(x_{i},t_{M})\) is the exact solution and \(u_{i}^{M}\) is the numerical solution with the mesh step sizes h and τ at the grid point \((x_{i},t_{M})\). The order in the following tables is calculated by
Example 1
Consider the following two-sided tempered fractional diffusion problem:
The exact solution is given by \(u(x,t)=e^{-t-\lambda x}x^{4}(1-x)^{4}\). Then the source term is given as
Example 2
This example is a modification of Example 1. We replace the diffusion coefficient function \(d{(x)}\) by \(x^{2}\), then the source term is given as
Other data are the same as those in Example 1.
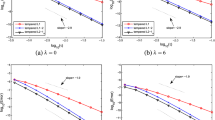
From Tables 1 and 2, we can observe the second order convergence rate in both spatial and temporal directions for different α in \(L_{\infty}\) norm, which is consistent with our theoretical analysis. It is remarked that we numerically test the eigenvalues of matrix \(D\mathcal{M}+\mathcal{M}^{T}D\) in Examples 1 and 2, respectively. We find that all eigenvalues of the matrix \(D\mathcal{M}+\mathcal{M}^{T}D\) in Example 1 are negative, which implies that the \(D\mathcal{M}\) is negative definite, hence our assumption in the convergence analysis is valid, and the numerical results are consistent with Theorem 2. However, when the assumption in Theorem 2 is not satisfied, see Example 2, we also get the desired second order convergence rate in both spatial and temporal directions.
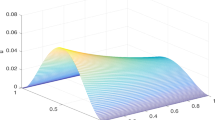
In Figures 1 and 2, we plot the curve figures of the approximating errors \(( \vert u(x_{i},t_{M})-u_{i}^{M} \vert )\) with different mesh sizes at the final time step \(t_{M}=1\) via a time-marching procedure, where \(\gamma_{1}=0.8\) and \(\lambda=1.0\) when \(\alpha=1.5\) for Example 1 and \(\alpha=1.8\) for Example 2, respectively. These figures show that the maximum norm error, defined in Eq. (11), becomes relatively smaller as the mesh size becomes smaller, which provides the validation of our results once again.

The error curve figures with \(\pmb{h=\tau=\frac{1}{256}}\) (left) and \(\pmb{h=\tau=\frac{1}{512}}\) (right) at \(\pmb{t_{M}=1}\) when \(\pmb{\alpha=1.5}\) , \(\pmb{\gamma_{1}=0.8}\) and \(\pmb{\lambda=1.0}\) for Example 1 .

The error curve figures with \(\pmb{h=\tau=\frac {1}{256}}\) (left) and \(\pmb{h=\tau=\frac{1}{512}}\) (right) at \(\pmb{t_{M}=1}\) when \(\pmb{\alpha=1.8}\) , \(\pmb{\gamma_{1}=0.8}\) and \(\pmb{\lambda=1.0}\) for Example 2 .
5 Conclusion
In this paper, the Crank-Nicolson method is proposed for solving a class of variable-coefficient tempered-FDEs (1). The method is proven to be unconditionally stable and convergent under a certain condition with rate \(\mathcal{O}(h^{2}+\tau^{2})\). Numerical examples show good agreement with the theoretical analysis.
References
Benson, DA, Wheatcraft, SW, Meerschaert, MM: The fractional-order governing equation of Lévy motion. Water Resour. Res. 36, 1413-1423 (2000)
Baeumera, B, Meerschaert, MM: Tempered stable Lévy motion and transient super-diffusion. J. Comput. Appl. Math. 233, 2438-2448 (2010)
Meerschaert, MM, Zhang, Y, Baeumer, B: Tempered anomalous diffusions in heterogeneous systems. Geophys. Res. Lett. 35, L17403-L17407 (2008)
Metzler, R, Klafter, J: The restaurant at the end of the random walk: recent developments in the description of anomalous transport by fractional dynamics. J. Phys. A 37, R161-R208 (2004)
Carr, P, Geman, H, Madan, DB, Yor, M: Stochastic volatility for Lévy processes. Math. Finance 13, 345-382 (2003)
Wang, WF, Chen, X, Ding, D, Lei, SL: Circulant preconditioning technique for barrier options pricing under fractional diffusion models. Int. J. Comput. Math. 92, 2596-2614 (2015)
Meerschaert, MM, Tadjeran, C: Finite difference approximations for fractional advection-dispersion flow equations. J. Comput. Appl. Math. 172, 65-77 (2004)
Sousa, E, Li, C: A weighted finite difference method for the fractional diffusion equation based on the Riemann-Liouville derivative. Appl. Numer. Math. 90, 22-37 (2015)
Pang, HK, Sun, HW: Multigrid method for fractional diffusion equations. J. Comput. Phys. 231, 693-703 (2012)
Pan, JY, Ke, RH, Ng, MK, Sun, HW: Preconditioning techniques for diagonal-times-Toeplitz matrices in fractional diffusion equations. SIAM J. Sci. Comput. 36, A2698-A2719 (2014)
Lei, SL, Sun, HW: A circulant preconditioner for fractional diffusion equations. J. Comput. Phys. 242, 715-725 (2013)
Qu, W, Lei, SL, Vong, SW: Circulant and skew-circulant splitting iteration for fractional advection-diffusion equations. Int. J. Comput. Math. 91, 2232-2242 (2014)
Wang, H, Basu, TS: A fast finite difference method for two-dimensional space-fractional diffusion equations. SIAM J. Sci. Comput. 34, A2444-A2458 (2012)
Lin, FR, Yang, SW, Jin, XQ: Preconditioned iterative methods for fractional diffusion equation. J. Comput. Phys. 256, 109-117 (2014)
Chen, MH, Deng, WH: Fourth order accurate scheme for the space fractional diffusion equations. SIAM J. Numer. Anal. 52(3), 1418-1438 (2014)
Tian, WY, Zhou, H, Deng, WH: A class of second order difference approximations for solving space fractional diffusion equations. Math. Comput. 84, 1703-1727 (2015)
Li, C, Deng, WH: High order schemes for the tempered fractional diffusion equations. Adv. Comput. Math. 42, 543-572 (2016)
Zhang, H, Liu, FW, Turner, I, Chen, S: The numerical simulation of the tempered fractional Black-Scholes equation for European double barrier option. Appl. Math. Model. 40, 5819-5834 (2016)
Zheng, M, Karniadakis, GE: Numerical methods for SPDEs with tempered stable processes. SIAM J. Sci. Comput. 37, A1197-A1217 (2015)
Chakrabarty, Á, Meerschaert, MM: Tempered stable laws as random walk limits. Stat. Probab. Lett. 81, 989-997 (2011)
Sabzikar, F, Meerschaert, MM, Chen, J: Tempered fractional calculus. J. Comput. Phys. 293, 14-28 (2015)
Quarteroni, A, Sacco, R, Saleri, F: Numerical Mathematics, 2nd edn. Springer, Berlin (2007)
Horn, RA, Johnson, CR: Topic in Matrix Analysis. Cambridge University Press, Cambridge (1991)
Quarteroni, A, Valli, A: Numerical Approximation of Partial Differential Equations. Springer, Berlin (1997)
Acknowledgements
We would like to thank the anonymous reviewers for providing us with constructive comments and suggestions. This work is supported by the Macau Science and Technology Development Funds (Grant No. 099/2013/A3) from the Macau Special Administrative Region of the People’s Republic of China, the National Natural Science Foundation of China under Grant (No. 11601340), and the Natural Science Foundation of Shaoguan University under Grant (No. SY2014KJ07).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Qu, W., Liang, Y. Stability and convergence of the Crank-Nicolson scheme for a class of variable-coefficient tempered fractional diffusion equations. Adv Differ Equ 2017, 108 (2017). https://doi.org/10.1186/s13662-017-1150-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1150-1