
Abstract
The objective of this paper is to study some qualitative dynamic properties of a nonautonomous predator-prey model with stochastic perturbation and Crowley-Martin functional response. The existence of a global positive solution and stochastically ultimate boundedness are obtained. Sufficient conditions for extinction, persistence in the mean, and stochastic permanence of the system are established. We also derive conditions to guarantee the global attractiveness and stochastic persistence in probability of the model. Our theoretical results are confirmed by numerical simulations.
Similar content being viewed by others
1 Introduction
Predator-prey systems play an important role in studying the dynamics of interacting species. During the last decades, lots of predator-prey models have been proposed and analyzed from various prospectives. When investigating biological phenomena, functional response is one of the most important factors that affect dynamical properties of biological and mathematical models [1–4]. Many researchers have paid their attention to predator-prey systems with prey-dependent functional response. However, the predator functional response occurs quite frequently in nature and laboratory, such as searching for food and sharing, or competing for, food [5, 6]. Therefore, we must not ignore the predator functional response to prey because of the effect of such a response on dynamical system properties, and many types of predator-dependent functions have been proposed and analyzed. The deterministic predator-prey model with Crowley-Martin functional response can be expressed as follows:
where \(x(t)\) and \(y(t)\) represent the population densities of the prey and predator at time t, respectively. \(r(t)\) and \(g(t)\) are the growth rate of the prey and predator, respectively, \(k(t)\) and \(h(t)\) stand for the density-dependent coefficients of species x and y, \(\omega(t)\) is the capturing rate of predator, and \(f(t)\) denotes the rate of conversion of nutrients into the production of predator at time t. The ratio \(\frac{\omega(t) x(t) y(t)}{1+a(t)x(t)+b(t)y(t)+a(t)b(t)x(t)y(t)}\) is the functional response, where \(a(t)\) and \(b(t)\) describe the effects of handling time and the magnitude of interference among predators.
Meanwhile, population models in the real world are always affected by a lot of unpredictably environmental noises. To predict richer and more complex dynamics of the model, stochastic perturbations are introduced into the population models (see, e.g., [7–10]). In common, there are four approaches including stochastic effects in the model [11], that is, through time Markov chain model [12], parameter perturbation [13], being proportional to the variables [11], and robusting the positive equilibria of deterministic models. Stochastic perturbation will bring effect on almost all parameters of the model in various different ways, and it is valuable to consider more than one approach to describe the random effects on the system. In this paper, we adopt a combination of the second and third approaches to include stochastic perturbations, that is, we assume that the stochastic perturbations are of white noise type and proportional to \(x(t)\), \(y(t)\), influenced respectively on \(\dot{x}(t)\) and \(\dot{y}(t)\) in system (1); Moreover, the capturing and conversion rate coefficients \(\omega(t)\) and \(f(t)\) are changed as \(\omega(t)+\sigma _{2}(t)\dot{B}_{1}(t)\), and \(f(t)+\delta_{2}(t)\dot{B}_{2}(t)\), respectively. Then, in accordance with system (1), we propose the following stochastic predator-prey model:
where all the coefficients are positive, continuous, and differentiable bounded functions on \(\mathbb{R}_{+}=[0,+\infty)\), \(\sigma_{i}^{2}(t)\) and \(\delta_{i}^{2}(t)\) (\(i=1,2\)) denote the intensities of the white noises, \(B_{1}(t)\), \(B_{2}(t)\) are independent Brownian motions defined on a complete probability space \((\Omega,\mathcal{F},\mathbb{P})\) with a filtration \(\{\mathcal{F}_{t}\}_{t\in\mathbb{R}_{+}}\) satisfying the usual conditions (i.e., it is right continuous and increasing with \(\mathcal{F}_{0}\) containing all \(\mathbb{P}\)-null sets) [14]. We denote \(\mathbb{R}_{+}^{2}=\{ X=(x,y)|x>0, y>0\}\) and \(|X(t)|=(x^{2}(t)+y^{2}(t))^{\frac{1}{2}}\).
To proceed, we present some useful definitions and notations:
-
\(f^{u}= \sup_{ t\geq0}f(t)\), \(f^{l}=\inf_{ t\geq0}f(t)\), \(\langle f(t)\rangle= \frac{1}{t}\int_{0}^{t}f(s)\, \mathrm{d}s\), \(f^{*}=\limsup_{ t\rightarrow +\infty}f(t)\), \(f_{*}=\liminf_{ t\rightarrow+\infty}f(t)\).
-
Extinction: \(\lim_{t\rightarrow+\infty}x(t)=0\) a.s.
-
Non-persistence in the mean: \(\langle x\rangle^{*}=0\).
-
Weak persistence in the mean: \(\langle x\rangle^{*}>0\).
-
Strong persistence in the mean: \(\langle x\rangle_{*}>0\).
-
Stochastic permanence: there are constants \(\delta>0\), \(\chi>0\) such that \(P_{*}\{|x(t)|\geq\delta\}\geq 1-\varepsilon\) and \(P_{*}\{|x(t)|\leq\chi\}\geq1-\varepsilon\).
This paper is arranged as follows. In Section 2, we show that there exists a unique positive solution of system (2) and prove its boundedness. In Section 3, we obtain sufficient conditions for extinction, persistence in the mean, and stochastic permanence. The global attractiveness and stochastic persistence in probability of system (2) are analyzed in Section 4. Finally, some numerical simulations to support our analytical findings are given in Section 5.
2 Existence, uniqueness, and stochastically ultimate boundedness
Theorem 1
For any given value \((x(0),y(0))=X_{0}\in\mathbb{R}_{2}^{+}\), there is a unique solution \((x(t),y(t))\) on \(t\geq0\), and the solution remains in \(\mathbb{R}_{+}\) with probability one.
The proof of Theorem 1 is standard, and we present it in the Appendix.
Theorem 2
The solutions of model (2) are stochastically ultimately bounded for any initial value \(X_{0} =(x_{0}, y_{0})\in \mathbb{R}_{2}^{+}\).
Proof
We need to show that for any \(\varepsilon\in(0,1)\), there exists a positive constant \(\delta= \delta(\varepsilon)\) such that for any given initial value \(X_{0} \in\mathbb{R}_{2}^{+}\), the solution \(X(t)\) to (2) has the property
Let \(V_{1}(x)= x^{p}\) and \(V_{2}(y)=y^{p}\) for \((x, y)\in \mathbb{R}_{2}^{+}\) and \(p>1\). Then, we obtain
and
Here, \(LV_{1}(x,y)\leq px^{p}(r^{u}-k^{l}x+0.5(p-1)(\sigma_{1}^{u}+\frac{\sigma _{2}^{u}}{b^{l}})^{2})\), and \(LV_{2}(x,y)\leq py^{p}(\frac{f^{u}}{a^{l}}+0.5p(\delta_{1}^{u}+\frac {\delta_{2}^{u}}{a^{l}})^{2}-h^{l}y)\). Thus,
and
For (3), we consider the equation
with initial value \(z(0)=z_{0}\). Obviously, we can obtain that
Letting \(t\rightarrow\infty\), we have
Thus, by the comparison theorem we get
Similarly, we obtain
Thus, for a given constant \(\varepsilon>0\), there exists \(T>0\) such that
for all \(t>T\). In accordance with the continuity of \(E[x^{p}(t)]\) and \(E[y^{p}(t)]\), there are \(\overline{M}_{1}(p), \overline{M}_{2}(p)>0\) satisfying \(E[x^{p}(t)]\leq \overline{M}_{1}(p)\) and \(E[y^{p}(t)] \leq \overline{M}_{2}(p)\) for \(t\leq T\). Denote
Then, for all \(t\in R_{+}\), we have
Consequently,
where \(M_{p}=2^{\frac{p}{2}}(M_{1}(p)+M_{2}(p))\). By virtue of the Chebyshev inequality, the proof is completed. □
3 Persistence and extinction
In this part, we show the long-time dynamical properties of system (2), including extinction, persistence in the mean, and stochastic permanence in Theorems 3-5. Before giving the theorems, we introduce some assumptions and lemmas.
In [15], the author considered the stochastic differential equation
where \(x=(x_{1},\ldots,x_{n})^{T}\), \(b=(b_{1},\ldots, b_{n})^{T}\), \(A=(a_{ij})_{n\times n}\), \(w(t)=(w_{1}(t),\ldots,w_{n}(t))^{T}\), \(\sigma (t)=(\sigma_{ij}(t))_{n\times n}\) and obtained the following theorem (Theorem 4.1 in [15]):
Suppose that all the parameters \(b_{i}(t)\), \(a_{ij}(t)\), and \(\sigma_{ij}(t)\) (\(1\leq i,j \leq n\)) are bounded on \(t\in\mathbb{R}_{+}\) and there exist positive numbers \(c_{1}, \ldots, c_{n}\) satisfying
where \(\overline{C}=\operatorname{diag}(c_{1}, \ldots, c_{n})\) and \(\lambda ^{+}_{\mathrm{max}}(A)=\sup_{x\in\mathbb{R}^{n}_{+}, |x|=1}x^{T}Ax\). Then, for any initial value \(x(0)\in\mathbb{R}^{n}_{+}\), the solution \(x(t)\) of the SDE (4) has the property
Introducing an auxiliary matrix \(\overline{A}=(\bar {a}_{ij})_{n\times n}\), where \(\bar{a}_{ij}=\sup_{t\geq0}\bar {a}_{ij}(t)\), \(1\leq i,j\leq n\), the author also achieved a more useful conclusion to verify condition (5):
If −A̅ is a nonsingular M-matrix, then condition (5) holds.
Thus, we obtain the following lemma.
Assumption (H1)
\(k^{l}h^{l}>f^{u}\omega^{u}\).
Lemma 1
If Assumption (H1) holds, then the solution \(X(t)=(x(t ), y(t))\) of system (2) with initial value \((x_{0}, y_{0}) \in \mathbb{R}_{2}^{+}\) has the following properties:
and there is a positive constant K such that
Proof
By virtue of the useful conclusion obtained by Cheng [15], we achieve that under Assumption (H1), the conditions of Theorem 4.1 in [15] are satisfied. Then inequality (6) is proved.
Next, we turn to (7). Denote \(V(x,y)=e^{t}(x+y)\). Then by Itô’s formula we have
Here,
where \(C>0\) is a constant. Therefore, \(\limsup_{t\rightarrow\infty} E(V(x(t),y(t)))\leq C\), and (7) is proved. □
Consider the ordinary differential equations
Then we have the following results on the persistence and extinction of the populations.
Theorem 3
In system (2), for the prey population x, if Assumption (H1) holds, then the following conclusions hold:
-
(1)
If \(\langle r_{1}\rangle^{*}<0\), then the prey species x ends in extinction with probability 1, where \(r_{1}(t)=r(t)-0.5\sigma _{1}^{2}(t)\).
-
(2)
If \(\langle r_{1}\rangle^{*}=0\), then the prey species x is nonpersistent in the mean with probability 1.
-
(3)
If \(\langle r-0.5(\sigma_{1}+\frac{\sigma_{2}}{b})^{2}\rangle ^{*}>0\), then the prey species x is weakly persistent in the mean with probability 1.
-
(4)
If \(\langle r-0.5(\sigma_{1}+\frac{\sigma_{2}}{b})^{2}\rangle _{*}-\langle\frac{\omega}{b}\rangle^{*}>0\), then the species population x is strongly persistent in the mean with probability 1.
-
(5)
If \(\langle r_{1}\rangle^{*}>0\), then \(\langle x(t)\rangle^{*}\leq\frac{r^{u}}{k^{l}}\triangleq M_{x}\).
The proof of Theorem 3 is presented in the Appendix.
Theorem 4
In system (2), for the predator population y, if Assumption (H1) holds, then the following conclusions hold:
-
(1)
If \(k_{*}\langle-g-0.5\delta_{1}^{2}\rangle^{*}+f^{*}\langle r_{1}\rangle^{*}<0\), then the predator species y is extinct with probability 1.
-
(2)
If \(k_{*}\langle-g-0.5\delta_{1}^{2}\rangle^{*}+f^{*}\langle r_{1}\rangle^{*}=0\), then the predator species y is nonpersistent in the mean with probability 1.
-
(3)
If \(\langle-g-0.5(\delta_{1}+\frac{\delta_{2}}{a})^{2}\rangle ^{*}+\langle\frac{f\bar{x}}{1+a\bar{x}+b\bar{y}+ab\bar{x}\bar {y}}\rangle^{*} -f^{u}\frac{4b^{l}\langle\sigma_{1}\sigma_{2}\rangle^{*}+\langle\sigma _{2}^{2}\rangle^{*}}{(b^{l})^{2}k^{l}}>0\), then the predator species y is weakly persistent in the mean with probability 1, where \((\bar{x}(t),\bar{y}(t))\) is the solution of (8) with initial value \((x_{0},y_{0})\in\mathbb{R}_{+}^{2}\).
-
(4)
If \(f^{l}\langle r-0.5(\sigma_{1}+\frac{\sigma_{2}}{b})^{2}\rangle _{*}+k^{u}\langle-g-0.5(\delta_{1}+\frac{\delta_{2}}{a})^{2}\rangle ^{*}>0\), then the species population y is strongly persistent in the mean with probability 1.
-
(5)
If \(\langle-g-0.5\delta_{1}^{2}\rangle^{*}+\langle \frac{f}{a}\rangle^{*}>0\), then \(\langle y(t)\rangle^{*}\leq\frac{\langle -g-0.5\delta_{1}^{2}\rangle^{*}+\langle \frac{f}{a}\rangle^{*}}{h^{l}}\triangleq M_{y}\).
The proof of Theorem 4 is given in the Appendix.
Remark 1
From the proof of Theorem 4 we can observe that if \(\langle r_{1}\rangle^{*}>0\) and \(k_{*}\langle-g-0.5\delta _{1}^{2}\rangle^{*}+f^{*}\langle r_{1}\rangle^{*}<0\), then although the prey population survives, the predators die out because of the too large diffusion coefficient \(\delta_{1}^{2}\).
Remark 2
From Theorems 3 and 4 we derive that if \(\langle r_{1}\rangle^{*}<0\), then both the prey and predator populations eventually end in extinction. Meanwhile, in this case, the functional rate has no influence on the extinction of the system.
Theorem 5
Suppose that \(2(\max\{\sigma_{1}^{u},\frac{\sigma_{2}^{u}}{b^{l}},\delta _{1}^{u},\frac{\delta_{2}^{u}}{a^{l}}\})^{2}< \min\{r^{l}-\frac{\omega^{u}}{b^{l}},\frac{f^{l}}{a^{u}}-g^{u}\}\), then system (2) is stochastically permanent.
Proof
The proof is motivated by Li and Mao [16] and Liu and Wang [17]. The whole proof is divided into two parts. First, we prove that for arbitrary \(\varepsilon>0\), there exists a constant \(\delta>0\) such that \(P_{*}\{|x(t)|\geq\delta \}\geq 1-\varepsilon\).
Above all, we claim that for any initial value \(X(0) = (x(0), y(0))\in\mathbb{R}_{2}^{+}\), the solution \(X(t) = (x(t), y(t))\) satisfies
Here, θ is an arbitrary positive constant satisfying
By (9) there exists a constant \(p >0\) satisfying
Define \(V(x,y)=x+y\). Then
Letting \(U(x,y)=\frac{1}{V(x,y)}\), by Itô’s formula we obtain
Choose a positive constant θ such that it obeys (9). Then
Thus, we can choose \(p >0\) sufficiently small such that it satisfies (10). Denote \(W(X)=e^{pt}(1+U(X))^{\theta}\),
Obviously,
Hence,
By (10) there exists a positive constant S such that \(LW(X)\leq Se^{pt}\). Thus,
Then,
In other words,
Thus, for any \(\varepsilon>0\), letting \(\delta=(\frac{\varepsilon}{M})^{\frac{1}{\theta}}\), by the Chebyshev inequality we obtain
Therefore,
In the following, we prove that for any \(\varepsilon>0\), there exists a constant \(\chi>0\) such that \(P_{*}\{|X(t)|\leq\chi\}\geq1-\varepsilon\). Define \(V_{4}(X)=x^{q}+y^{q}\), where, \(0< q<1\) and \(X=(x,y)\in\mathbb{R}_{2}^{+}\). By Itô’s formula we have
Let \(k_{0}\) be so large that \(X_{0}\) lies within the interval \([\frac{1}{k_{0}},k_{0}]\). For each integer \(k\geq k_{0}\), we define the stopping time \(\tau_{k}=\inf\{t\geq0: X(t) \notin(1/k,k) \}\). Obviously, \(\tau_{k}\) increases as \(k\rightarrow\infty\). Therefore,
where \(K_{1}\), \(K_{2}\) are positive constants. Letting \(k\rightarrow +\infty\), we have
In other words, we have shown that \(\limsup_{t\rightarrow+\infty} E[X^{q}(t)]\leq K_{1}+K_{2}\). Thus, for any given \(\varepsilon>0\), choosing \(\chi=\frac{(K_{1}+K_{2})^{1/q}}{\varepsilon^{1/q}}\), by the Chebyshev inequality we get
that is,
Consequently, \(P_{*}\{|X(t)|\leq\chi\}\geq1-\varepsilon\).
Theorem 5 is proved. □
4 Global attractiveness of the system and stochastically persistent in probability
Definition 1
System (2) is globally attractive if
for any two positive solutions \((x_{1}(t),y_{1}(t))\), \((x_{2}(t),y_{2}(t))\) of system (2).
Theorem 6
Suppose that \((x(t),y(t))\) is a solution of system (2) on \(t\geq0\) with initial value \((x_{0}, y_{0})\in \mathbb{R}_{+}^{2}\). Then almost every sample path of \((x(t),y(t))\) is uniformly continuous.
Proof
From system (2) we have
Set
we obtain
and
In addition, in view of the moment inequality for stochastic integrals, we show that, for \(0\leq t_{1}\leq t_{2}\) and \(p>2\),
Thus, for \(0< t_{1}< t_{2}<\infty\), \(t_{2}-t_{1}\leq1\), and \(\frac{1}{p}+\frac{1}{q}=1\), we get
Here, \(F(p)=\max\{F_{1}(p), F_{2}(p)\}\). By Lemma 3 in [18, 19] we have that almost every sample path of \(x(t)\) is locally but uniformly Hölder-continuous with exponent υ for every \(\upsilon\in(0,\frac{p-2}{2p})\), and therefore, almost every sample path of \(x(t)\) is uniformly continuous on \(t\in\mathbb{R}_{+}\). Similarly, we can prove that almost every sample path of \(y(t)\) is also uniformly continuous on \(t\in\mathbb{R}_{+}\).
Theorem 6 is proved. □
Lemma 2
Let f be a nonnegative function defined on \(\mathbb{R}_{+}\) such that f is integrable and uniformly continuous. Then \(\lim_{t\rightarrow+\infty} f(t)=0\).
Theorem 7
Suppose that \(\sigma_{2}=0\), \(\delta_{2}=0\), and there exist constants \(\mu_{i}>0\) (\(i=1,2\)) such that \(\liminf_{t\rightarrow\infty} A_{i}(t)>0\), where
Then
where \((x_{1}(t),y_{1}(t))\), \((x_{2}(t),y_{2}(t))\) are any two solutions of model (2) with initial values \(X_{10}=(x_{1}(0), y_{1}(0))\in R^{2}_{+}\) and \(X_{20}=(x_{2}(0), y_{2}(0))\in R^{2}_{+}\). Moreover, model (2) is globally attractive.
Proof
We construct a Lyapunov function as follows:
Then, we achieve
Since \(\liminf_{t\rightarrow\infty} A_{i}(t)>0\) (\(i=1,2\)), there exist constants \(\alpha>0\) and \(T_{0}>0\) such that \(A_{i}(t)\geq\alpha\) (\(i=1,2\)) for all \(t\geq T_{0}\). Thus,
for all \(t\geq T_{0}\). Integrating (13) from \(T_{0}\) to t, we get
that is,
Then, by \(V(t)\geq0\) and (14) we have
According to Theorem 6 and Lemma 2, the model is globally attractive.
On the other hand, by system (2) and inequality (7) we have
Therefore, \(E(x(t))\) is a uniformly continuous function. Similarly, we can obtain that \(E(y(t))\) is uniformly continuous. According to (15) and Barbalat’s conclusion [20], assertion (12) is achieved. □
In the following, we discuss the stochastic persistence in probability of our model, which was proposed and discussed by Schreiber et al. [21] and Liu et al. [22] for
where \(X(t)=(X_{1}(t),\ldots, X_{n}(t))\). If there exists a unique invariant probability measure V satisfying \(V(\Delta_{0})=0\) and the distribution of \(X(t)\) converges to V as \(t\rightarrow+\infty \) whenever \(X(0)\in\mathbb{R}^{n}_{+}\), where \(\Delta_{0}=\{a\in \overline{\mathbb{R}}^{n}_{+}|a_{i}=0 \text{ for some } i, 1\leq i\leq n\}\), then (16) is stochastically persistent in probability.
Theorem 8
Suppose that \(\sigma_{2}=0\) and \(\delta_{2}=0\) and let the conditions of Theorem 7 hold. If \(\langle r-0.5(\sigma_{1}+\frac{\sigma_{2}}{b})^{2}\rangle_{*}>\min\{ \langle\frac{\omega}{b}\rangle^{*}, -\frac{k^{u}}{f^{l}}\langle -g-0.5(\delta_{1}+\frac{\delta_{2}}{a})^{2}\rangle^{*}\}\), then system (2) is stochastically persistent in probability.
Proof
The proof is motivated by [22]. First, we prove that system (2) is asymptotically stable in distribution, that is, there exists a unique probability measure μ such that for every \(X(0)\in \mathbb{R}^{2}_{+}\), the transition probability \(p(t, X(0),\cdot)\) of \(X(t)\) converges weakly to μ as \(t\rightarrow+\infty\).
Let \(X(t;X_{10})\) be a solution of (2) with initial value \(X_{1}(0)=X_{10} \in\mathbb{R}^{2}_{+}\), \(p(t,X_{10}, \mathrm{d}y)\) be the transition probability of \(X(t;X_{10})\), and \(P(t,X_{10}, B)\) denote the probability of event \(X(t;X_{10})\in B\). Applying inequality (7) and the Chebyshev inequality, \(\{p(t,X_{10},\mathrm {d}y): t\geq0\}\) is tight.
Denote all the probability measures on \(\mathbb{R}^{2}_{+}\) by \(\mathcal {P}(\mathbb{R}^{2}_{+})\). Then, for any \(P_{1}, P_{2} \in\mathcal{P}\), we can define the metric
where \(L=\{f: \mathbb{R}^{2}_{+}\rightarrow\mathbb{R}||f(x)-f(y)|\leq\| x-y\|, |f(\cdot)|\leq1\}\). For \(f\in L\) and \(t,s>0\), we have
By (12) there exists a constant time \(T>0\) such that, for all \(t\geq T\),
Hence,
Since f is arbitrary, we have
for all \(t\geq T\), \(s>0\). Thus, \(\{p(t,X_{10},\cdot): t\geq0\}\) is Cauchy in the space \(\mathcal{P}(\mathbb{R}^{2}_{+})\). Then there exists a unique \(\mu\in\mathcal{P}(\mathbb{R}^{2}_{+})\) satisfying
where \(\varrho=(0.1, 0.1)^{T}\). In addition, by (12) we obtain
Therefore,
Then system (2) is asymptotically stable in distribution.
On the other hand, by Theorems 3 and 4 we get that
Therefore, model (2) is stochastically persistent in probability. □
5 Numerical simulation
This section presents a numerical simulation to verify our theoretical analysis of system (2). By means of the Milstein method mentioned in Higham [23], we consider the following discretized equations:
In Figure 1, we let \(r(t)=0.4+0.1 \sin t\), \(k(t)=0.7+0.01 \sin t\), \(\omega(t)=0.1+0.02\sin t\), \(f(t)=0.2+0.02 \sin t\), \(g(t)=0.2+0.05 \sin t\), \(h(t)=0.2+0.01 \sin t\), \(\frac{\sigma_{1}^{2}(t)}{2}=0.5+0.02\sin t\), \(\frac{\sigma_{2}^{2}(t)}{2}=0.3+0.02\sin t\), \(\frac{\delta_{1}^{2}(t)}{2}=0.4+0.02\sin t\), \(\frac{\delta_{2}^{2}(t)}{2}=0.3+0.02\sin t\), and different values of \(a(t)\) and \(b(t)\) are chosen for Figures 1(a)-1(d). Then, we have \(\langle r_{1}(t)\rangle^{*}=-0.1<0\). According to Theorems 3 and 4, both of the prey and predator populations (x and y, respectively) end in extinction.

The figure depicts the extinction of the prey and predator species. (a) \(a(t)=0.1+0.04 \sin t\), \(b(t)=0.5+0.05 \sin t\). (b) \(a(t)=b(t)=0\). (c) \(a(t)=0\), \(b(t)=0.5+0.05 \sin t\). (d) \(a(t)=0.1+0.04 \sin t\), \(b(t)=0\). Both of the prey and predator populations go to extinction.
In Figure 2, we choose \(\frac{\sigma_{1}^{2}(t)}{2}=0.1+0.05\sin t\), \(\frac{\sigma_{2}^{2}(t)}{2}=0.1+0.05\sin t\), \(\frac{\delta_{1}^{2}(t)}{2}=0.8+0.02\sin t\), \(\frac{\delta_{2}^{2}(t)}{2}=0.3+0.02\sin t\), \(r(t)=1.8+0.01 \sin t\), \(b(t)=0.4+0.2 \sin t\), and the other parameters are the same as those in Figure 1. Then, \(\langle r(t)-0.5(\sigma_{1}(t)+\frac{\sigma_{2}(t)}{b})^{2}\rangle^{*}\geq 1.2>0\) and \((k(t))_{*}\langle -g(t)-0.5\delta_{1}^{2}(t)\rangle^{*}+(f(t))^{*}\langle r_{1}(t)\rangle^{*}=-0.316<0\). By virtue of Theorems 3 and 4 we get that the prey population x is weakly persistent in the mean, whereas the predator population y is extinct, which is confirmed by Figure 2. Next, set \(\frac{\sigma_{1}^{2}(t)}{2}=0.1+0.05\sin t\), \(\frac{\sigma_{2}^{2}(t)}{2}=0.1+0.05\sin t\), \(\frac{\delta_{1}^{2}(t)}{2}=0.09+0.02\sin t\), \(\frac{\delta_{2}^{2}(t)}{2}=0.08+0.02\sin t\), \(b(t)=0.4+0.2 \sin t\), and \(f(t)=0.45+0.02\sin t\). The other parameters are the same as those in Figure 1. Then, \(\langle r(t)-0.5(\sigma_{1}(t)+\frac{\sigma_{2}(t)}{b})^{2}\rangle^{*}\geq 0\), and from Figure 3 we observe that both of prey and predator populations are weakly persistent in the mean.

The prey population is weakly persistent in the mean, whereas the predator species y is extinct.

The populations are weakly persistent in the mean for system ( 2 ) with \(\pmb{\frac{\sigma_{1}^{2}(t)}{2}=\frac{\sigma_{2}^{2}(t)}{2}= 0.1+0.05\sin t}\) , \(\pmb{\frac{\delta_{1}^{2}(t)}{2}=0.09+0.02\sin t}\) , and \(\pmb{\frac{\delta_{2}^{2}(t)}{2}=0.08+0.02\sin t}\) .
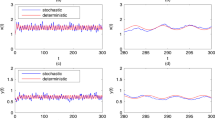
In Figure 4, we let \(\sigma_{1}(t)=0.05+0.02\sin t\), \(\sigma_{2}(t)=0.02+0.01\sin t\), \(\delta_{1}(t)=0.06+0.01\sin t\), \(\delta_{2}(t)=0.04+0.02\sin t\), \(r(t)=1.8+0.01 \sin t\), \(a(t)=0.46+0.04 \sin t\), \(f(t)=1.12+0.02\sin t\), and \((x_{1}(0), y_{1}(0))=(1.5, 1.2)\). Thus, the conditions of Theorem 5 hold, and model (2) is stochastically permanent.

The system is stochastically permanent.
Moreover, we choose \(\frac{\sigma_{1}^{2}(t)}{2}=0.1+0.05\sin t\), \(\frac{\delta_{1}^{2}(t)}{2}=0.04+0.02\sin t\), \(r(t)=1.8+0.01 \sin t\), \(h(t)=0.05+0.01 \sin t\), and \(f(t)=1.12+0.02\sin t\). The initial conditions are \(x_{1}(0)=2\), \(y_{1}(0)=0.6\), and \(x_{2}(0)=0.5\), \(y_{2}(0)=6\). The only difference among Figures 5(a)-5(d) is the values of \(\sigma_{2}^{2}\) and \(\delta_{2}^{2}\), which are chosen as \(\sigma_{2}^{2}=\delta_{2}^{2}=0\) in Figures 5(a), 5(b), whereas \(\frac{\sigma_{2}^{2}(t)}{2}=0.06+0.01\sin t\), \(\frac{\delta_{2}^{2}(t)}{2}=0.03+0.02\sin t\) in Figures 5(c), 5(d). From the figures we can observe that system (2) is globally attractive.

The figure shows the attractiveness of system ( 2 ). The only difference between these graphs is the values of \(\sigma_{2}^{2}\) and \(\delta_{2}^{2}\). (a), (b): \(\sigma_{2}^{2}=\delta_{2}^{2}=0\). (c), (d):\(\frac{\sigma_{2}^{2}(t)}{2}=0.06+0.01\sin t\), \(\frac{\delta_{2}^{2}(t)}{2}=0.03+0.02\sin t\).
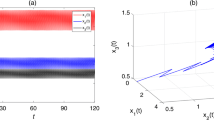
In the following example, we investigate the effects of functional response on the species. First, by comparing Figures 1(a)-1(d) we observe that the effects of handling time \(a(t)\) and the magnitude of interference among predators \(b(t)\) do not influence the extinction of the system. Second, we fix \(f(t)=0.05+0.02\sin t\), and the other parameters are the same as in Figure 3. Then we obtain that \((k(t))_{*}\langle -g(t)-0.5\delta_{1}^{2}(t)\rangle^{*}+(f(t))^{*}\langle r_{1}(t)\rangle^{*}<0\). On the basis of Theorem 4, the predator species goes to extinction, and it is confirmed by Figure 6(a). We increase the intensity of conversion rate and choose \(f(t)=0.6+0.02\sin t\) and \(f(t)=2.2+0.02\sin t\), respectively, for Figures 6(b) and 6(c). From Figures 6(a)-6(c), we observe that the predator changes from extinction to persistence, which shows that increasing the amplitude of periodical conversion rate is benefit for the coexistence of ecosystems.

The figure depicts the effects of functional response on the dynamical properties of the model. The difference between the graphs is the values of \(f(t)\): (a) \(f(t)=0.05+0.02 \sin t\), (b) \(f(t)=0.6+0.02 \sin t\), and (c) \(f(t)=2.2+0.02 \sin t\).
References
Ji, C, Jiang, D, Shi, N: Analysis of a predator-prey model with modified Leslie-Gower and Holling-type II schemes with stochastic perturbation. J. Math. Anal. Appl. 359, 482-498 (2009)
Wang, L, Teng, Z, Jiang, H: Global attractivity of a discrete SIRS epidemic model with standard incidence rate. Math. Methods Appl. Sci. 36, 601-619 (2013)
Gao, S, Liu, Y, Nieto, JJ, Andrade, H: Seasonality and mixed vaccination strategy in an epidemic model with vertical transmission. Math. Comput. Simul. 81, 1855-1868 (2011)
Hu, Z, Teng, Z, Jia, C, Zhang, L, Chen, X: Complex dynamical behaviors in a discrete eco-epidemiological model with disease in prey. Adv. Differ. Equ. 2014, 265 (2014)
Liu, X, Zhong, S, Tian, B, Zheng, F: Asymptotic properties of a stochastic predator-prey model with Crowley-Martin functional response. J. Appl. Math. Comput. 43, 479-490 (2013)
Qiu, H, Liu, M, Wang, K, Wang, Y: Dynamics of a stochastic predator-prey system with Beddington-DeAngelis functional response. Appl. Math. Comput. 219, 2303-2312 (2012)
Bandyopadhyay, M, Chattopadhyay, J: Ratio-dependent predator-prey model: effect of environmental fluctuation and stability. Nonlinearity 18, 913-936 (2005)
Liu, M, Wang, K, Wu, Q: Survival analysis of stochastic competitive models in a polluted environment and stochastic competitive exclusion principle. Bull. Math. Biol. 73, 1969-2012 (2011)
Lin, Y, Jiang, D, Wang, S: Stationary distribution of a stochastic SIS epidemic model with vaccination. Physica A 394, 187-197 (2014)
Witbooi, P: Stability of an SEIR epidemic model with independent stochastic perturbations. Physica A 392, 4928-4936 (2013)
Zhou, Y, Zhang, W, Yuan, S: Survival and stationary distribution in a stochastic SIS model. Discrete Dyn. Nat. Soc. 2013, Article ID 592821 (2013)
Tan, W, Zhu, X: A stochastic model of the HIV epidemic for heterosexual transmission involving married couples and prostitutes: I. The probabilities of HIV transmission and pair formation. Math. Comput. Model. 24(11), 47-107 (1996)
Dalal, N, Greenhalgh, D, Mao, X: A stochastic model of AIDS and condom use. J. Math. Anal. Appl. 325, 36-53 (2007)
Wang, K: Stochastic Models in Mathematical Biology. Science Press, Beijing (2010)
Cheng, S: Stochastic population systems. Stoch. Anal. Appl. 27, 854-874 (2009)
Li, X, Mao, X: Population dynamical behavior of non-autonomous Lotka-Volterra competitive system with random perturbation. Discrete Contin. Dyn. Syst. 24, 523-545 (2009)
Liu, M, Wang, K: Persistence and extinction in stochastic non-autonomous logistic systems. J. Math. Anal. Appl. 375, 443-457 (2011)
Mao, X: Stochastic versions of the LaSalle theorem. J. Differ. Equ. 153, 175-195 (1999)
Karatzas, I, Shreve, S: Brownian Motion and Stochastic Calculus. Springer, Berlin (1991)
Barbalat, I: Systèmes d’équations différentielles d’oscillations non linéaires. Rev. Roum. Math. Pures Appl. 4, 267-270 (1959)
Schreiber, S, Benaïm, M, Atchadé, K: Persistence in fluctuating environments. J. Math. Biol. 62, 655-683 (2011)
Liu, M, Bai, C: Analysis of a stochastic tri-trophic food-chain model with harvesting. J. Math. Biol. 73, 597-625 (2016)
Higham, D: An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 43, 525-546 (2001)
Acknowledgements
The authors gratefully acknowledge the anonymous referees for their careful reading of the original manuscript. This work is supported by The National Natural Science Foundation of China (61273215, 11261004, 11301492), The bidding project of Gannan Normal University (15zb01) and PhD Programs Foundation of Ministry of Education of China (20130145120005).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors declare that the study was realized in collaboration with the same responsibility. All authors read and approved the final manuscript.
Appendix
Appendix
Proof of Theorem 1
Let \(k_{0}>0\) be so large that \(X_{0}\) lies within the interval \([1/k_{0},k_{0}]\). For each integer \(k>k_{0}\), define the stopping times \(\tau_{k}=\inf\{t \in[0,\tau_{e}]: x(t) \notin(1/k,k) \mbox{ or } y(t) \notin(1/k,k)\}\). Then, \(\tau_{k}\) is increasing as \(k\rightarrow \infty\). Denote \(\tau_{\infty}={\lim_{k\rightarrow +\infty}}\tau_{k}\); thus, \(\tau_{\infty}\leq\tau_{e}\). Next, we show that \(\tau_{\infty}=\infty\). Otherwise, there are constants \(T>0\) and \(\varepsilon\in(0,1)\) satisfying \(P\{\tau_{\infty}<\infty\}>\varepsilon\). Then, there exists an integer \(k_{1}\geq k_{0}\) such that
for all \(k>k_{1}\). Define the \(C^{2}\)-function \(V: \mathbb{R}_{+}^{2}\rightarrow\mathbb {R}_{+}\) by \(V(x,y)=(x-1-\ln x)+(y-1-\ln y)\), which is nonnegative. If \((x(t),y(t))\in\mathbb{R}_{2}^{+}\), then by Itô’s formula we have
Here
where G is a positive number. Integrating both sides of inequality (A.1) from 0 to \(\tau_{k}\wedge T\) (\(\tau_{k}\wedge T =\min\{\tau_{k}, T\}\)) and taking the expectations, we obtain that
Let \(\Omega_{k}=\{\tau_{k}\leq T\}\). Then we have \(P(\Omega_{k})\geq\varepsilon\). For each \(\omega\in \Omega_{k}\), \(x(\tau_{k},\omega)\) or \(y(\tau_{k},\omega)\) equals either k or \(1/k\), and
Therefore,
where \(1_{\Omega_{k}}\) is the indicator function of \(\Omega_{k}\). Letting \(k \rightarrow\infty\), we obtain the contradiction.
The proof is completed. □
Proof of Theorem 3
(1) From system (2) we have that
Integrating the first equation of (A.2), we have
Let
and
Then, \(M_{i}(t)\) (\(i=1,2\)) is a local martingale, and the quadratic variation satisfies
and
According to the strong law of large numbers for martingales, we get
Thus,
Then, \(\lim_{t\rightarrow\infty}x(t)=0\).
(2) By virtue of the superior limit and (A.4) we can show that, for an arbitrary \(\varepsilon>0\), there exists \(T>0\) such that \(\langle r_{1}(t)\rangle\leq\langle r_{1}(t)\rangle^{*}+\frac{\varepsilon}{2}\) and \(\frac{M_{1}(t)}{t}\leq\frac{\varepsilon}{2}\) for all \(t>T\). From (A.2) we get
By Lemma 4 in [8] we have \(\langle x(t)\rangle^{*}\leq\frac{\varepsilon}{k^{l}}\). By the arbitrariness of ε the desired conclusion is obtained.
(3) According to (A.4) and Lemma 1, we have
Then, \(\langle x\rangle^{*}>0\) a.s. If not, for arbitrary \(\upsilon\in\{\langle x(t,\upsilon)\rangle^{*}=0\}\), by (A.5) we have \(\langle y(t,\upsilon)\rangle^{*}>0\).
Meanwhile, from equation (A.2) we get
Therefore, \(\lim_{t\rightarrow\infty} y(t,\upsilon)=0\), which contradicts with \(\langle y(t,\upsilon)\rangle^{*}>0\). The proof is completed.
(4) By the condition \(\langle r-0.5(\sigma_{1}+\frac{\sigma_{2}}{b})^{2}\rangle_{*}-\langle \frac{\omega}{b}\rangle^{*}>0\) there exists a sufficiently small \(\varepsilon>0\) such that \(\langle r-0.5(\sigma_{1}+\frac{\sigma_{2}}{b})^{2}\rangle_{*}-\langle \frac{\omega}{b}\rangle^{*}-\varepsilon>0\). In addition, by (A.4) for this \(\varepsilon>0\), there exists \(T>0\) such that
for all \(t>T\). Then, we get
According to Lemma 4 in [8] and the arbitrariness of ε, we obtain
The proof is completed.
(5) From the first equation of (A.2) we have that
Thus,
In addition, from the property of the superior limit and (A.4), for the given positive number ε, there is \(T_{1}>0\) satisfying
for all \(t>T_{1}\). According to Lemma 4 in [8] and the arbitrariness of ε, we get that
□
Proof of Theorem 4
(1) Case I. If \(\langle r_{1}\rangle^{*}\leq 0\), then by Theorem 3 we have \(\langle x(t)\rangle^{*}=0\). Thus, for arbitrary sufficiently small \(\varepsilon>0\), there exists \(T>0\) such that \(\langle-g-0.5\delta_{1}^{2}\rangle<\langle-g-0.5\delta_{1}^{2}\rangle ^{*}+\frac{\varepsilon}{2}\) and \(M_{2}(t)<\frac{\varepsilon t}{2}\) for all \(t>T\). Therefore,
and then \(\lim_{t\rightarrow\infty}y(t)=0\).
Case II. If \(\langle r_{1}\rangle^{*}> 0\), then by (A.4), for sufficiently small \(\varepsilon >0\), there exists \(T>0\) such that
for all \(t>T\). By virtue of Lemma 4 in [8] and the arbitrariness of ε, we get
Thus, we get
Then, \(\lim_{t\rightarrow\infty}y(t)=0\).
(2) In (1), we have already shown that if \(\langle r_{1}\rangle^{*}\leq0\), then \(\lim_{t\rightarrow\infty}y(t)=0\), and, as a result, \(\langle y(t)\rangle^{*}= 0\). Now, we show that if \(\langle r_{1}\rangle^{*}> 0\), then \(\langle y(t)\rangle^{*}= 0\) is still valid. Otherwise, \(\langle y(t)\rangle^{*}> 0\), and by Lemma 1 we show that \([\frac{\ln y(t)}{t}]^{*}= 0\). According to (A.7), we get
Meanwhile, for an arbitrary constant \(\varepsilon>0\), there exists \(T>0\) such that
for all \(t>T\). Thus, we have
Using Lemma 4 in [8], we obtain
which indicates that \(\langle y(t)\rangle^{*}\leq\frac{\langle -g-0.5\delta_{1}^{2}\rangle^{*} +f^{*}\langle x(t)\rangle^{*}}{h_{*}}\). Applying (A.6), we have
This is a contradiction. Therefore, \(\langle y(t)\rangle^{*}=0\) a.s.
(3) In this part, we need to prove that \(\langle y(t)\rangle^{*}>0\) a.s. If not, for arbitrary \(\varepsilon_{1}>0\), there exist a solution \((\check{x}(t),\check{y}(t))\) with initial value \((x_{0},y_{0})\in \mathbb{R}_{+}^{2}\) such that \(P\{\langle \check{y}(t)\rangle^{*}<\varepsilon_{1}\}>0\). Let \(\varepsilon_{1}\) be sufficiently small such that
Then, we obtain
Here, \(\check{x}(t)\leq \bar{x}(t)\) and \(\check{y}(t)\leq\bar{y}(t)\) a.s. for \(t\in [0,+\infty)\). Notice that
and thus,
Define the Lyapunov function \(V_{3}(t)=|\ln\bar{x}(t)-\ln\check{x}(t)|\), which is a positive function on \(\mathbb{R}_{+}\). Then
Setting \(M_{3}(t)=\int_{0}^{t}(\frac{\sigma_{2}(s)\bar{y}}{1+a(s)\bar {x}+b(s)\bar{y}+a(s)b(s)\bar{x}\bar{y}} -\frac{\sigma_{2}(s)\check{y}}{1+a(s)\check{x}+b(s)\check {y}+a(s)b(s)\check{x}\check{y}})\,\mathrm{d}B_{1}(s)\), by the strong law of large numbers for martingales we get
Thus, for the given constant \(\varepsilon_{1}>0\), there exists \(T>0\) such that \(M_{3}(t)<\varepsilon_{1}t\) for all \(t\geq T\). Therefore, we get that
Then, we obtain
Substituting this inequality into (A.8) and taking the superior limit of the inequality, we get
which contradicts with Lemma 1, and thus \(\langle y(t)\rangle^{*}>0\) a.s.
(4) The proof is motivated by Liu and Bai [22]. We have
By (6), for arbitrary \(0<\varepsilon<\frac{f^{l}}{k^{u}}\langle r(t)-0.5(\sigma_{1}(t)+\frac{\sigma_{2}(t) }{b(t)})^{2}\rangle _{*}+\langle-g(t)-0.5(\delta_{1}(t)+\frac{\delta_{2}(t) }{b(t)})^{2}\rangle^{*}\), there exists a random time \(T=T(\omega)\) satisfying
for all \(t\geq T\). Substituting this inequality into (A.9), we obtain that
According to Lemma 4 in [8], we get that
The proof is completed.
(5) From the second equation of (A.2) we have
Thus,
In addition, from the property of the superior limit and (A.4) we have that, for the given positive number ε, there exists \(T_{2}>0\) such that
for all \(t>T_{2}\). According to Lemma 4 in [8], we have
□
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Zhang, Y., Chen, S. & Gao, S. Analysis of a nonautonomous stochastic predator-prey model with Crowley-Martin functional response. Adv Differ Equ 2016, 264 (2016). https://doi.org/10.1186/s13662-016-0993-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0993-1