
Abstract
In this paper, a parametric study of the rhombic drive mechanism of a solar low-temperature Stirling engine was conducted. The goal is to find out the relationship between the rhombic drive mechanism parameters and the performance of a low-temperature differential Stirling engine. The results indicate that the offset distance from the gear center and gear radius of the rhombic drive mechanism have to be maximized, in order to increase the indicated power, while other rhombic drive parameters should be reduced for the same reason. Another result is that for realizing the optimized phase angle for beta-type Stirling engines, one should act on working piston-related bars and rhombic drive gear radius.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Background
The Stirling engine is an externally heated machine which runs according to a reversible closed cycle. It was invented in 1816 by the Stirling brothers [1]. This engine is known by high heat conversion efficiency, reliability, low noise operation, and ability to use many fuels. These characteristics make the Stirling engines adapted to the demand of the effective use of energy and environmental preservation [2, 3]. In fact, reducing environmental impacts of conventional energy resources and meeting the growing energy demand of the global population had motivated considerable research attention in a wide range of environmental and engineering application of renewable form of energy [4], and among all possible alternative energy options, solar energy is becoming more popular in the world. This is mainly due to the availability of plenty of sunlight in many countries [5].
The low-temperature differential Stirling engine (LTD-SE) is a kind of Stirling engine that can run with a small temperature difference between the hot and the cold sources. In 1983, Kolin [6] demonstrated the first LTD-SE. Senft [6, 7] developed the Ringbom engine using Kolin's conclusions. Many other prototypes of LTD-SE were manufactured and tested. In 2006, Kongtragool and Wongwises [8] constructed twin power pistons and four power pistons, gamma-configuration LTD Stirling engines. In 2007, Martaj et al. [9] presented a thermodynamic analysis of a low-temperature Stirling engine at steady state operation. In 2012, Boutammachte and Knorr [10] studied a γ-type LTD-SE. They presented several experimental measurements made under laboratory and field-test conditions in Morocco [11]. Measurements with flat plate cooler and discontinuous motion of the displacer were conducted to verify some recommendations of Kolin in expectation of power output improvement. They concluded that the assumption of Kolin related to the proportionality of speed to temperature difference is justified, but the expectation about improvement of the machine performance with discontinuous motion of the two pistons needs to be reviewed.
As a result of a scientific cooperation between Moulay Ismail University in Morocco and the University of Technology of Dresden in Germany, an LTD γ-type Stirling engine was manufactured. This engine was tested and studied under real conditions [11]. Based on the conclusions of this study, a new prototype of LTD-SE with rhombic drive mechanism is being developed. This new prototype is designed to be simple, robust, cheap, and stable to be used for water pumping in poor rural African areas. In fact, this engine is manufactured more than 90% from mechanical cheap parts available in poor areas, so that it could be easily manufactured and maintained right there. Besides, it is a solar engine, fact that lowers significantly its use price. In addition to that, the new prototype is a beta type which has a symmetric geometry that gives the engine more stability compared to γ-type Stirling engines, and the drive mechanism used, which is the rhombic drive, allows the coaxial position of the engine pistons, fact that improves also the engine stability.
Since this machine is developed to be as low expensive as possible, it was designed without any concentrator mechanism; consequently, its power output is relatively low. Therefore, a special attention should be kept for each construction parameter in order to optimize the machine performance.
In this optic, this paper aims to study the drive mechanism adopted in the studied machine, which is the rhombic drive mechanism. Thus, a parametric study based on Schmidt theory is conducted to find out the relationship between the rhombic drive parameters and the performance of low-temperature Stirling engines. A thermodynamic analysis of the prototype is also conducted. Moreover, as the relationship between rhombic drive mechanism parameters is not enough studied and available for researchers, a study of these parameters is conducted, and a methodology of choosing their values is suggested.
Methods
Prototype description
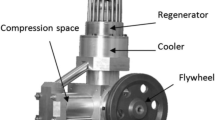
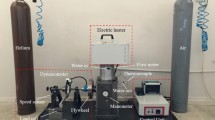
As a result of a scientific cooperation between Dresden University of Technology and Moulay Ismail University in Morocco, an LTD-SE (beta type) is under construction. The mechanical arrangement of the manufactured LTD-SE and its specifications are shown in Figure 1 and Table 1.

Schematic illustration of the prototype.
Kinematic relations
Figure 2 shows the parameters of the rhombic drive mechanism. The position and velocity vectors of each link are expressed as follows:

Schematic illustration of the rhombic drive mechanism parameters.
From the geometrical constraints,
Then, the y position of the working piston and the displacer are as follows:
Based on the prototype data (baseline case), available in Tables 1 and 2, one can get the vertical positions of the working piston and displacer (Figure 3) and variation of engine spaces versus crank angle (Figure 4).

Working piston and displacer positions versus crank angle.

Variation of engine spaces versus crank angle.
Engine work and power
Schmidt [12] presented a mathematically exact expression for calculating the indicated work of Stirling engines. The Schmidt theory adopts many ideal assumptions, like perfect regeneration, isothermal compression and expansion, and harmonic motion of the displacer and the working piston. The Schmidt theory is widely used due to its mathematical simplicity, and it is considered by many researchers, suitable for studying Stirling engines in designing stage, as it is the case for this study.
Schmidt first calculated the gas mass in different parts of the machine and used the perfect gas equation. Applied on our prototype (Figure 5, Table 3), we obtain the following equations:

Different prototype spaces.
Schmidt adopted the assumption of harmonic motion:
The pressure is expressed as follows:
Cyclic work and power are expressed as follows:
where n is the engine speed and m is the total gas mass.
Thermodynamic analysis
Applying the thermodynamic analysis proposed by Martaj et al. [9] to the particular studied prototype, we obtain the following results.
Regenerator analysis
The regenerator is used to store and release the heat exchanged with the fluid during its movement from the cold cell towards the hot cell and conversely. Schmidt assumes that the regeneration is perfect. But in practice, it is difficult to realize a perfect regenerator. In this thermodynamic analysis, it is supposed an imperfect regeneration. Thus, the fluid temperature at the exit of the regenerator towards the cold cell T f′ is higher than T f , and the fluid temperature at the exit of the regenerator towards the hot cell T c′ is lower than T c (Figure 6).

Schematic illustration of the prototype temperatures.
The regenerator efficiency is defined by
where ΔTr represents the temperature pinch in the regenerator, assumed identical at the two extreme orifices of the regenerator:
Since the regenerator volume is constant, the work exchanged is null, and the average temperature Tr is supposed to be constant.
The first thermodynamic principle for an open system is written as
In the regenerator cell, Equation 27 can be written as
where dm i is positive when it enters the volume i. Two cases arise for each opening:
Flow from cold side towards the regenerator: dm f < 0, then T rf = T f , T rc = T c′ .
Flow from hot side towards the regenerator: dm c < 0, then T rc = T c , T rf = T f′ .
The mass in this cell is
The mass variation in the regenerator is
Heating cell
The heating cell has a single communication orifice; Equation 27 could be written in the following form:
As stated before, if elementary mass is entering the hot volume (d mc > 0), then T rc = Tc′, else T rc = T c .
The differential form of the perfect gas state equation is
The hot cell is supposed to be isothermal; thus, Equation 33 becomes
According to the perfect gas state equation,
Equation 31 becomes
Cooling cell
Using the same reasoning as for the previous cell, Equation 27 becomes
If dm f > 0, then T rf = T f′ , else T rf = T f .
As for the heating cell, we obtain also
Thus, Equation 37 becomes
Engine balance
During a crankshaft rotation, the heat exchanged in the cooling and heating cells are Q c = ∮ δQ c and Q f = ∮ δQ f obtained by integration of Equations 36 and 39. Since the regenerator is supposed imperfect, an additional quantity of heat Q r , to bring by the hot source, is essential:
The overall engine balance is written as
The work is carried out by the working piston during compression and expansion. It can also be calculated by the following expression:
This work is also
where dV is the total fluid variation and P is the internal pressure. The thermal engine efficiency is expressed by
Rhombic drive study
The rhombic drive mechanism was proposed by the Philips Company [13] and widely used for beta-type Stirling engines [14]. The major advantage of the rhombic drive mechanism is that the coaxial movement of the piston and the displacer is quiet and requires no serious lubrication [15].
As the relationship between rhombic drive mechanism parameters is not studied enough and available for researchers, a study of these parameters was conducted. Here are some conditions for good functioning of the rhombic drive mechanism:
-
1.
At Φ = 0°, the rigid rods d 1 and d 2 should be tall enough in order to reach the most far point during the cycle:
(46)(47) -
2.
At Φ = 180°, gears should be far enough from each other:
(48)(49)
As a consequence, during the design of the rhombic drive mechanism, we propose the following order to choose the rhombic drive parameters:
Choosing the crossbar lengths d3 and d4 and the offset distance from the gear center e
-
1.
Calculating the interval of values allowed to gear radius as follows:
(50) -
2.
Choosing the connecting bar lengths d 1 and d 2, with respect to the conditions below:
(51)(52)
A parametric study based on the theoretical analysis is performed in order to evaluate the effect of each rhombic drive parameter on the machine characteristics. Note that Schmidt calculating assumptions are adopted. At each study, only one parameter is changed in order to find out its single effect. Results are found using a computer program on the Microsoft EXCEL. For a complete revolution of the crank and at a step of 1°, the program computes the instantaneous positions of the displacer and the working piston, the volume of each space of the machine, and the total mass, work, and power of the cycle. The program has the ability to change power calculation parameters in order to show their single effect.
The geometrical and the operating variables which are regarded as the baseline case in this study are listed in Tables 1 and 2. In this case, the rotational speed is set at 30 rpm; the absorber and the cooler temperatures are set at 70°C and 20°C, respectively.
Results and discussion
Figure 7 displays the effect of rhombic drive parameters on indicated power. Figure 7a,b shows that any increase in offset distance from the gear center (e) or gear radius (rg) has a positive influence on power. Figure 8a,b gives the explanation of the former fact; when increasing e and rg, strokes of displacer and also working piston increase, then dead volumes are reduced, and total volume variation is increased. All of these have direct positive influence on indicated power. It is noticed that for the same variation of e and rg (Δe ≈ Δrg ≈ 0.025 m), the offset distance from gear e has larger positive effect on the indicated power than rg (ΔP(e) = 18 W, ΔP(rg) = 13 W). Then, considering only power, the optimal values of e and rg are their maxima values, but one should keep in mind that we can increase the stroke and power consequently - just as much as the machine volume allows it. Maximum value of rg is

Effect of rhombic drive parameters on power.

Effect of rhombic drive parameters on piston strokes.
It is noticed that strokes of displacer and working piston are equal and vary in the same way while changing e and rg. Shown in Figure 7c,d,e,f are the respective effects of the rhombic drive parameters d1, d2, d3, and d4 on indicated power. These figures indicate that increasing the value of any of these parameters has negative effect on power. The same reasoning as for e and rg could be done. Figure 8c,d,e,f gives the explanation of the former fact; any increase in d1, d2, d3, and d4 values decreases strokes of both displacer and working piston, then dead volumes will increase, and total volume variation will be decreased, and consequently, the indicated power will be reduced. It is noticed that for the studied machine, for the same variation of d1 and d2 (Δ(d1) ≈ Δ(d2) ≈ 0.273 m), the negative effect of d1 is greater three times than that of d2 (ΔP(d1) = -18 W, ΔP(d2) = -6 W). This is due to the fact that the working piston is related to bar d1; thus, its effect is much more important than that of bar d2, which is related to the displacer which has no other role but moving gas from one side to another, whereas the working piston has an effect on total volume variation, directly related to indicated work and power. Also, for bars d3 and d4, similar remarks and conclusion could be done. For the same variation, the effect of d3 is greater two times than that of d4 for the studied prototype. Therefore, for increasing the machine power, minima values of these parameters should be adopted:
Figure 8 indicates that parameters d1 and d3 have an effect only on working piston stroke, but no influence on displacer stroke, while parameters d2 and d4 have an influence only on displacer stroke and no effect on working piston stroke. For parameters e and rg, they have simultaneous equal effect on both displacer and working piston strokes. This gives a directive about adjusting the stroke of one of the pistons (for example, for reducing dead volume) without changing the stroke of the other. Many investigations about optimal phase angle for beta-type Stirling engines show that the optimal value is 90° [16].
Figure 9 shows the influence of different parameters of the rhombic drive mechanism on phase angle. As noticed for power, the increase in values of the offset distance from the gear center (e) or gear radius (rg) increases the phase angle, whereas increasing the rest of the rhombic drive parameter values decreases the phase angle. It is noticed that for the same variation of e and rg, the effect of gear radius rg is greater four times than the effect of e. Also, the effect of parameter d1 is greater three times than that of d2 on the phase angle of the studied prototype, and the effect of d3 is greater two times than that of d4. This fact is due to the tightness of working space versus displacer-related space, which makes the working piston parameters having more considerable influence on the phase angle than that of the displacer-related parameters. As a conclusion, for obtaining a special phase angle, one should pay a special attention to parameters rg, d1, and d3.

Effect of rhombic drive parameters on phase angle.
Conclusions
Theoretical analysis has been performed to study the rhombic drive mechanism parameter effect on a low-temperature solar Stirling engine. The variation of the machine spaces was investigated, and a thermodynamic analysis and a calculation of power based on Schmidt theory were conducted. A parametric study was then performed to evaluate the effect of each rhombic drive mechanism parameter on some machine characteristics, like power, piston and displacer strokes, and phase angle. In accordance with the obtained results of this study, offset distance from the gear center and gear radius have to be maximized in order to maximize the indicated power, while other rhombic drive parameters should be reduced for the same reason. Their minima values were given relatively to each other. Directives about realizing the optimal phase angle of beta-type Stirling engines were also given. As a conclusion, based only on rhombic drive optimization, one can increase the studied prototype power about 50%.
References
Kolin I: Stirling Motor: History-Theory-Practice. Zagreb: Zagreb University Publications; 1991.
Bahrami M, Hamidi A, Porkhial S: Investigation of the effect of organic working fluids on thermodynamic performance of combined cycle Stirling-ORC. Int. J. Energ. Environ. Eng. 2013, 4: 12. 10.1186/2251-6832-4-12
Thombarea DG, Verma SK: Technological development in the Stirling cycle engines. Renew Sustain Energy Rev. 2008, 12: 1–38. 10.1016/j.rser.2006.07.001
Sunday O, Oyedepo SO, Adaramola MS, Paul S: Analysis of wind speed data and wind energy potential in three selected locations in south-east Nigeria. Int. J. Energ. Environ. Eng. 2012, 3: 7. 10.1186/2251-6832-3-7
Sharma P, Harinarayana T: Enhancement of energy generation from two layer solar panels. Int. J. Energ. Environ. Eng. 2012, 3: 12. 10.1186/2251-6832-3-12
Senft JR: An Introduction to low temperature differential Stirling engines. River Falls: Moriya Press; 2004.
Robson A, Grassie T, Kubie J: Modeling of a low-temperature differential Stirling engine. Proc. IMechE. Part C J. Mech. Eng. Sci. 2007, 221: 927–943. 10.1243/09544062JMES631
Kongtragool B, Wongwises S: Performance of low-temperature differential Stirling engines. Renew. Energ. 2007, 32: 547–566. 10.1016/j.renene.2006.03.003
Martaj N, Grosu L, Rochelle P: Thermodynamic study of a low temperature difference Stirling engine at steady state operation. Int. J. Thermodynam. 2007, 10: 165–176.
Boutammachte N: Untersuchungen zur instationären Wärmeübergangs- und Strömungsvorgängen in einem Niedertemperatur-Stirlingmotor. PhD thesis. University of Technology of Dresden; 2007.
Boutammachte N, Knorr J: Field-test of a solar low delta-T Stirling engine. Solar. Energ. 2012, 86: 1849–1856. 10.1016/j.solener.2012.03.001
Schmidt G: Theorie der lehmannschen calorischen maschine. Zeit des Vereines deutsch Ing 1871, 15: 97–112.
Hargreaves CM: The Philips Stirling Engines. New York: Elsevier; 1991.
Kerdchang P, Win M, Teekasap S, Hirunlabh J, Khedari J, Zeghmati B: Development of a new solar thermal engine system for circulating water for aeration. Sol. Energy 2005, 78: 518–527. 10.1016/j.solener.2004.07.010
Cheng C, Yu Y: Combining dynamic and thermodynamic models for dynamic simulation of beta-type Stirling engine with rhombic-drive mechanism. Renew. Energy 2012, 37: 161–173. 10.1016/j.renene.2011.06.013
El Hassani H, Boutammachte N, Knorr Y, Hannaoui M: Etudes des paramètres influençant la puissance d'un moteur Stirling solaire à basse température. University Ibn Zohr, Agadir: In abstracts of the 11th Mechanics Congress; 2013:23–26.
Acknowledgements
The authors are grateful to the staff of the Energy Institute of the Technical University of Dresden for their support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors' contributions
HEH performed the rhombic drive and the thermodynamic studies. JK designed and manufactured the studied prototype. NB supervised the research, performed the Schmidt calculation, and helped JK on constructing the studied machine. MEH supervised the research. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
El Hassani, H., Boutammachte, Ne., Knorr, J. et al. Study of a low-temperature Stirling engine driven by a rhombic drive mechanism. Int J Energy Environ Eng 4, 40 (2013). https://doi.org/10.1186/2251-6832-4-40
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-6832-4-40