
Abstract
In this paper, we study the existence and stability of positive periodic solutions for an n-species Lotka-Volterra system with deviating arguments, , , referred to as (E). By using Mawhin’s coincidence degree, matrix spectral theory, and some new estimation techniques for the prior bounds of unknown solutions to the equation , some new and interesting sufficient conditions are obtained guaranteeing the existence and global stability of positive periodic solutions of the above system. The model studied in this paper is more general, and it includes some known Lotka-Volterra type systems, such as competitive systems, predator-prey systems, and competitor-mutualist systems. Our new results are different from the known results in the previous literature.
MSC:34K13, 37B25.
Similar content being viewed by others


1 Introduction
In recent years, various delay differential equation models have been proposed in the study of population ecology and infectious diseases. One of the most famous models is the Lotka-Volterra system. Because of its theoretical and practical significance, Lotka-Volterra systems have been extensively and intensively studied for the past few years (see, e.g., [1–7]). In particular, Xia and Han [2] investigated the existence and stability of the following periodic n-species Lotka-Volterra competitive system:
where are w-periodic functions () with . They obtain one results as follows.
Theorem 1.1 Assume that the following conditions hold:
(A1) , ;
(A2) , where and
Then system (1.1) has at least one positive ω-periodic solution.
In the proof of Theorem 1.1, the author did not consider the deviating arguments in every terms , . Thus, Theorem 1.1 cannot be applied to system (E) when .
Recently, by using the method of Krasnoselskii’s fixed point theorem, Tang and Zou [1] investigated the existence of positive periodic solutions of the following system with deviating arguments:
By the same method of [1], Lv et al. [4] investigated the existence and global attractivity of positive periodic solutions of 3-species Lotka-Volterra predator-prey systems with deviating arguments as follows:
Compared to system (1.2), the front sign of coefficients of system (1.3) could change.
In this paper, motivating by some ideas in [2], we generalize system (1.3) to a model with n-species,
where and are w-periodic functions (), , , with
For the biological point of view, it is always assumed that is strictly positive.
It is not difficult to see that all the above mentioned models are special cases of this model. Thus, it is worth investigating the existence and stability of positive periodic solutions of system (1.4). To the best of our knowledge, very few authors have been concerned with employing matrix spectral theory to obtain the prior bounds for biological systems so far. In this paper, by combing matrix spectral theory with Mawhin’s coincidence degree theory, we manage to obtain a set of new and interesting conditions, which are very different from the known results in the literature.
The structure of this paper is as follows. In Section 2, some new and interesting sufficient conditions for the existence of positive periodic solutions of system (1.4) are obtained. In Section 3, we will explore the stability of positive periodic solution of system (1.4). Finally, an example is given to show that the results of this paper are easily applicable.
2 Existence of positive periodic solutions
In this section, we shall obtain some new sufficient conditions for the existence of a positive periodic solution of system (1.4).
For convenience, we introduce some notations, definitions, and lemmas. Let be a constant, denote , with the norm
and , . If is a continuous ω-periodic function defined on ℝ, denote
For the matrix , denotes the transpose of G, and denotes the identity matrix of size n. represents a diagonal matrix with specified diagonal entries. A matrix or vector means that all entries of A are greater than or equal to zero. can be defined similarly. For matrices or vectors A and B, (resp., ) means that (resp., ). We denote the spectral radius of the matrix A by .
Lemma 2.1 ([3])
If satisfies and , , then the function has a unique inverse function satisfying and , .
Remark 2.1 If , and , , from Lemma 2.1, we have , , where is the inverse function of , thus .
Definition 2.1 ([8])
A real matrix is said to be an M-matrix if , , , and .
Lemma 2.2 ([9])
Let be an matrix and let . Then , where denotes the identity matrix of size n.
In order to use Mawhin’s continuation theorem, we recall this theorem first.
Let X, Y be real Banach spaces, let be a Fredholm operator with index zero. Here, denotes the domain of L. This means that ImL is closed in Y and . Consider the supplementary subspaces and such that , and let , be the natural projections. Clearly, , thus the restriction is invertible. Denote the inverse of L by .
Now, let Ω be an open bounded subset of X with , a map is said to be L-compact on , if is bounded and the operator is compact.
Lemma 2.3 (Mawhin [10])
Suppose that X and Y are two Banach spaces, and that is a Fredholm operator with index zero. Furthermore, is an open bounded set, and is L-compact on . Assume of the following conditions to hold:
-
(i)
, , ;
-
(ii)
, ;
-
(iii)
. Here is an isomorphism. Then the equation has at least one solution on .
Using Lemma 2.1, we denote the inverse function by () and let
Theorem 2.1 Assume that the following conditions hold:
-
(H1) The algebraic equation system
has a unique solution ;
-
(H2) , where and
where , , is defined by (2.1);
-
(H3) , , where , .
Then system (1.4) has at least one positive ω-periodic solution.
Proof Make the change of variables
Then system (1.4) can be rewritten as
Obviously, system (1.4) has a positive ω-periodic solution if and only if system (2.3) has a ω-periodic solution.
By Lemma 2.3, we set , , and
where
Obviously, , . So ImL is closed in and , then the operator L is a Fredholm operator with index zero.
Let the projectors and be defined by
Then, P, Q are continuous operators such that , . Furthermore, the generalized inverse exists, which is given by
Assume that is an arbitrary solution of the equation for each , that is,
Integrating it on the interval gives
and by using Lemma 2.1, Remark 2.1, and (2.1), we see
it follows that
Letting , it follows from (2.7) that
or
which implies
It follows from (2.9) that
In view of and Lemma 2.2, we have . That is,
Then it follows from (2.10) and (2.11) that
which implies that there exists a , such that , , i.e.,
By (2.6), we have
i.e.,
or
which implies there exists a , such that
and from the condition (H3), we have
using (2.13) and combining the continuous function intermediate value theorem, there exists a , such that
i.e.,
On the other hand,
Combining with (2.14), we have
furthermore, we have
Clearly, is a constant independent of λ.
If , then is a constant vector, thus
If , then
It follows from (H1) that the algebraic equation has a unique solution . Let . Then is a constant.
Set . Obviously, conditions (i) and (ii) in Lemma 2.3 are satisfied. Moreover, it is easy to see that
where
J is an identity mapping. Therefore, by using Lemma 2.3, we find that system (2.3) has at least one ω-periodic solution. By (2.2), system (1.4) has at least one positive ω-periodic solution. This completes the proof of Theorem 2.1. □
3 Global asymptotic stability of positive periodic solutions
Under the assumption of Theorem 2.1, we know that system (1.4) has at least one positive ω-periodic solution, denoted by . In this section, we always assume the existence of positive periodic solutions and we study the global stability of positive periodic solutions of (1.4).
We recall some facts which will be used in the proof.
Definition 3.1 Let be the ω-periodic solution of (1.4) and let be any positive solution of (1.4); we say that is globally asymptotically stable if the following conditions hold:
-
(i)
is Lyapunov stable;
-
(ii)
is globally attractive in the sense that for all .
Lemma 3.1 ([7])
Let f be a nonnegative function defined on such that f is integrable on and is uniformly continuous on . Then .
Theorem 3.1 In addition to the existence of positive periodic solutions, assume that , , , and that there exist , , such that
where is the inverse function of , . Then system (1.4) has a unique positive ω-periodic solution which is globally asymptotically stable.
Proof Set
From (3.1), we have , , and
Let be any positive solution of system (1.4). We define a Lyapunov function as follows:
Let . Calculating the upper right derivative of at time t, it follows from (3.2) and (3.3) that
where . It follows from (3.4) that . Obviously, the zero solution of (1.4) is Lyapunov stable. On the other hand, let represent the initial time of system (1.4); t is an arbitrary time and . Then, integrating (3.4) over leads to
or
Noting that , it follows that
Therefore, by Lemma 3.1, we have
From Definition 3.1, Theorem 3.1 follows. □
As an application, we consider the following example.
Example 3.1 Considering the following system:
Corresponding to system (1.4), we have , , , ,
where , , , are the inverse of , , , , respectively. Then
and the algebraic system
has a unique solution . Then (H1)-(H3) of Theorem 2.1 are satisfied. Moreover, if we let , , we have
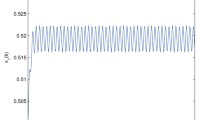
So the conditions of Theorem 3.1 are satisfied. Therefore, system (3.5) has a unique positive 2π-periodic solution which is globally asymptotically stable. In order to see these dynamic properties clearly, we draw the figures for the evolution of the solutions of system (3.5) by using the function ddesd in Matlab; see Figure 1.

The phase portrait and time series of system ( 3.5 ). (a) The 2π-period solution of system (3.5) in the plane. (b), (c) Time series of in plane. (d), (e) Time series of in the plane.
Remark 3.1 In view of and
we know that , , , , , . So the result of the above example cannot be obtained by [2], which implies that the results of this paper are essentially new.
References
Tang HX, Zou FX: On positive periodic solutions of Lotka-Volterra competition systems with deviating arguments. Proc. Am. Math. Soc. 2006, 134: 2967-2974. 10.1090/S0002-9939-06-08320-1
Xia YH, Han M: New conditions on the existence and stability of periodic solution in Lotka-Volterra’s population system. SIAM J. Appl. Math. 2009, 69: 1580-1597. 10.1137/070702485
Lu SP, Ge WG: On the existence of positive periodic solutions for n -species Lotka-Volterra population model with multiple deviating arguments. Acta Math. Sin. 2005, 48: 427-438. (in Chinese)
Lv X, Lu SP, Yan P: Existence and global attractivity of positive periodic solutions of Lotka-Volterra predator-prey systems with deviating arguments. Nonlinear Anal., Real World Appl. 2010, 11: 574-583. 10.1016/j.nonrwa.2009.09.004
Tang XH, Zou XF: Global attractivity of positive periodic solution to periodic Lotka-Volterra competition systems with pure delay. J. Differ. Equ. 2006, 228: 580-610. 10.1016/j.jde.2006.06.007
Gopalsamy K: Stability and Oscillation in Delay Differential Equations of Population Dynamics. Kluwer Academic, Dordrecht; 1992.
Kuang Y: Delay Differential Equations with Applications in Population Dynamics. Academic Press, Boston; 1993.
Lasalle JP: The Stability of Dynamical System. SIAM, Philadelphia; 1976.
Berman A, Plemmons RJ: Nonnegative Matrices in the Mathematical Sciences. Academic Press, New York; 1979.
Gaines RE, Mawhin JL Lecture Notes in Mathematics 568. In Coincidence Degree and Nonlinear Differential Equations. Springer, Berlin; 1977.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Xu, Y., He, Z. New conditions on the existence and stability of positive periodic solutions for n-species Lotka-Volterra systems with deviating arguments. Adv Differ Equ 2014, 93 (2014). https://doi.org/10.1186/1687-1847-2014-93
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-93