
Abstract
In this paper, a hyperchaotic memristor oscillator system is introduced. A new type of synchronization design is proposed to achieve combination synchronization among three different memristor oscillator systems. This all-new control technique can be applied to the general nonlinear systems. The theoretical analysis is verified with numerical simulations showing excellent agreement.
Similar content being viewed by others
1 Introduction
In recent years, lots of memristor oscillator systems have been used with the purpose of generating signals which are found in radio, satellite communications, switching power supply, etc. [1–10]. By using a passive two-terminal memristor, the memristor oscillator can be fully implemented on-chip with some simple circuit elements. Memristor oscillator systems are good to be used for developing memristive devices and memristive computing. The non-volatile memory of memristor oscillator system has tremendous potential in the dynamic memory and neural synapses [4]. Furthermore, the property can provide us with new methods for high performance computing. Along with the widening of memristor applications, it is necessary to do some deep and detailed research on the related nonlinear dynamics [11–13]. Nonlinear dynamics of memristor oscillator systems is extraordinarily complex [1–4, 6, 8, 10]. Chaotic behavior, sequence of period-doubling bifurcations, inverse sequence of chaotic band, and intermittent chaos are found in various memristor oscillator systems [1–4, 6, 8]. It should be emphasized that hyperchaos with more than one positive Lyapunov exponents has always been a research focus in the fields of lasers, nonlinear oscillators, nonlinear control, secure communication, and so on. Can we design a hyperchaotic memristor oscillator system and investigate its hyperchaotic dynamics? Apparently, this problem is not only of theoretical issue but also a problem of tech-economy as regards electronic circuits. At present, there is little literature on this topic. Based on this consideration, this paper will make a contribution in the context of hyperchaotic memristor oscillator system. In this paper, a fourth-order hyperchaotic memristor oscillator system is systematically illustrated.
Chaotic behavior may be unpredictable, uncoordinated, and constantly shifting under many circumstances. Because of this, chaotic dynamics, synchronization of coupled dynamic systems, and secure communications are always some hot research fields [11, 14–47]. Thus, chaotic systems and the related chaos synchronization problems are important and challenging. By considering linear or nonlinear observers and designing suitable synchronizing signals, a mass of synchronization schemes are developed, such as complete synchronization [11, 14–18], anti-synchronization [19–24], phase synchronization [16, 25–27], lag synchronization [17, 28–36], projective synchronization [17, 37–45], combination synchronization [46, 47]. In the conventional drive-response synchronization schemes, there is just one drive system and one response system. This type of synchronization scheme can be viewed as one-to-one system design and implementation. One-to-one system design and implementation would seem singularly unsuited in many fields of engineering application. In reality, the transmitted signals in secure communication via one-to-one system design and implementation are less vulnerable to malicious attacks and decoding. In many cases, we need to split the transmitted signals into several parts, and then different drive systems load different parts. Therefore, a natural and interesting question is whether we can design some novel synchronization schemes between multi-drive systems and one response system, or between multi-drive systems and multi-response systems? And no matter what the theories say, or what the actual engineering aspects are, these questions are definitely worth exploring. For this reason, based on the combination synchronization in [46, 47], our other objective in this paper is to study the hyperchaos synchronization between two drive memristor oscillator systems and one response memristor oscillator system. The analysis framework and theoretical results in this paper may play an important role in designing memristor oscillatory circuits, sensitive control systems, and signal generation, etc.
Motivated by the above discussions, in this paper, we first introduce and study a hyperchaotic memristor oscillator system. Then we propose a new type of hyperchaos combination synchronization scheme based on two drive systems and one response system. The generalization of synchronization scheme will provide a wider scope for engineering designs and applications. Finally, numerical simulations demonstrate the effectiveness and feasibility of the proposed control scheme. The proposed method in this paper can be applied to the general nonlinear systems.
2 Preliminaries
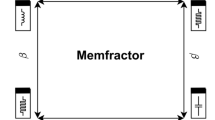
In this paper, consider a fourth-order memristor oscillator system with its dynamics described by the following equations:
where and denote voltages, and represent capacitors, is memductance function, and are resistors, , , L and G are magnetic flux, current, inductor and conductance, respectively.
Using the mathematical model of a cubic memristor [1, 2, 8], the memductance function is given by
where a and b are parameters.
From (1) and (2), it follows that
By merging similar items,
Let , , , , , , , , , , , then (4) can be rewritten as
Choose parameters , , , , , , , the initial state , , , , by means of a computer program with MATLAB, the corresponding Lyapunov exponents of system (5) are 0.350741, 0.013755, −0.008567, −7.812913. The numerical result is shown in Figure 1, where the first two Lyapunov exponents are positive. Clearly, it implies that memristor oscillator system (5) is hyperchaotic. Figures 2-5 describe the hyperchaotic attractors.

Dynamics of Lyapunov exponents from the fourth-order memristor oscillator system.

3D Projection of the hyperchaotic attractor from the fourth-order memristor oscillator system, vs. vs. .

3D Projection of the hyperchaotic attractor from the fourth-order memristor oscillator system, vs. vs. .

3D Projection of the hyperchaotic attractor from the fourth-order memristor oscillator system, vs. vs. .

3D Projection of the hyperchaotic attractor from the fourth-order memristor oscillator system, vs. vs. .
Remark 1 Although various chaotic memristor oscillator systems have been analyzed extensively in recent years, the hyperchaotic memristor oscillator system is rarely reported and investigated directly. However, the memristor oscillator system (5) achieves hyperchaotic characteristics. Thus, hyperchaotic memristor oscillator system (5) is important for our understanding of the hyperchaotic memristive system.
Now we introduce the scheme of combination synchronization that is needed later.
Consider the first drive system
The second drive system is given by
and the response system is described by
where state vectors , , , vector functions , is the appropriate control input that will be designed in order to obtain a certain control objective.
Definition 1 The drive systems (6), (7), and the response system (8) are said to be combination synchronization if there exist n-dimensional constant diagonal matrices , , and such that
where is vector norm, is the synchronization error vector, , , .
Remark 2 In Definition 1, matrices , , and are often called the scaling matrices. The scheme of combination synchronization is an improvement and extension of the existing synchronization schemes in the literature. When the scaling matrices or , the combination synchronization will degrade into complete synchronization. When the scaling matrices , the combination synchronization will change into chaos control.
3 Synchronization criteria
In this paper, consider system (5) as the first drive system and the second drive system is given by
the response system is described by
where , , , , , , , , , , , , , and are parameters, , , , are the appropriate control inputs that will be designed.
In our combination synchronization scheme, let , , , thus
Obviously, we have
Combining with (5), (10), and (11), then the synchronization error system (13) can be transformed into the following form:
Theorem 1 If the controller is chosen as
then the driven systems (5) and (10) will achieve combination synchronization with the response system (11).
Proof Choose the following Lyapunov function:
Calculating the upper right Dini-derivative of V along with the trajectory of system (14), we have
Substituting (15) into (17), then
where .
Let be arbitrarily given, integrating the above equation (18) from 0 to t, then
where is the Euclidean vector norm.
According to Barbalat’s lemma, we have as . Hence, as . It implies that the driven systems (5) and (10) can achieve combination synchronization with the response system (11). The proof is completed. □
Next, some corollaries can be directly derived from Theorem 1.
Corollary 1 If the controller is chosen as
then the driven system (5) will achieve complete synchronization with the response system (11).
Corollary 2 If the controller is chosen as
then the driven system (10) will achieve complete synchronization with the response system (11).
Corollary 3 If the controller is chosen as
then system (11) is asymptotically stabilizable.
Remark 3 The results obtained in Theorem 1 and Corollaries 1-3 either yield new, or extend, to a large extent, most of the existing results. To the best of our knowledge, few authors have considered synchronization control of the hyperchaotic memristor oscillator system. In fact, the control design of hyperchaotic memristor oscillator system is necessary and rewarding, in order to understand the memristive dynamics.
4 An illustrative example
In this section, a numerical example is given to verify the feasibility and effectiveness of the proposed control technique via computer simulations.
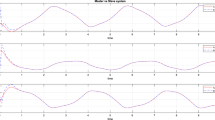
Assuming that parameters , , , , , , , the scaling matrices , , , the controller is chosen as
according to Theorem 1, then the driven systems (5) and (10) will achieve combination synchronization with the response system (11). Figures 6-9 depict the time response of the synchronization error .

Time response curve for synchronization error .

Time response curve for synchronization error .

Time response curve for synchronization error .

Time response curve for synchronization error .
It is worth pointing out that the result in the above numerical example cannot be obtained by using any existing results.
5 Concluding remarks
This paper has introduced a hyperchaotic memristor oscillator system and presented a novel control method using combination scheme to drive two memristor oscillator systems to synchronize one response memristor oscillator system. The resulting hyperchaos synchronization via combination scheme is also verified by computer simulations. It is believed that the derived results and analytical techniques have great potential in controlling various hyperchaotic systems and hyperchaotic circuits, which open up a wide area for further research of chaos and hyperchaos memristive dynamics.
References
Bao BC, Liu Z, Xu JP: Steady periodic memristor oscillator with transient chaotic behaviours. Electron. Lett. 2010, 46(3):237–238.
Bao BC, Liu Z, Xu JP: Transient chaos in smooth memristor oscillator. Chin. Phys. B 2010., 19(3): Article ID 030510
Corinto F, Ascoli A, Gilli M: Nonlinear dynamics of memristor oscillators. IEEE Trans. Circuits Syst. I, Regul. Pap. 2011, 58(6):1323–1336.
Itoh M, Chua LO: Memristor oscillators. Int. J. Bifurc. Chaos 2008, 18(11):3183–3206. 10.1142/S0218127408022354
Li ZJ, Zeng YC: A memristor oscillator based on a twin- T network. Chin. Phys. B 2013., 22(4): Article ID 040502
Muthuswamy B, Kokate PP: Memristor based chaotic circuits. IETE Tech. Rev. 2009, 26(6):417–429. 10.4103/0256-4602.57827
Riaza R: First order mem-circuits: modeling, nonlinear oscillations and bifurcations. IEEE Trans. Circuits Syst. I, Regul. Pap. 2013, 60(6):1570–1583.
Sun JW, Shen Y, Yin Q, Xu CJ: Compound synchronization of four memristor chaotic oscillator systems and secure communication. Chaos 2013., 23(1): Article ID 013140
Talukdar A, Radwan AG, Salama KN: Generalized model for memristor-based Wien family oscillators. Microelectron. J. 2011, 42(9):1032–1038. 10.1016/j.mejo.2011.07.001
Talukdar A, Radwan AG, Salama KN: Non linear dynamics of memristor based 3rd order oscillatory system. Microelectron. J. 2012, 43(3):169–175. 10.1016/j.mejo.2011.12.012
Wu AL, Wen SP, Zeng ZG: Synchronization control of a class of memristor-based recurrent neural networks. Inf. Sci. 2012, 183(1):106–116. 10.1016/j.ins.2011.07.044
Wu AL, Zeng ZG: Dynamic behaviors of memristor-based recurrent neural networks with time-varying delays. Neural Netw. 2012, 36: 1–10.
Wu AL, Zeng ZG: Exponential stabilization of memristive neural networks with time delays. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23(12):1919–1929.
Choi YP, Ha SY, Yun SB: Complete synchronization of Kuramoto oscillators with finite inertia. Physica D 2011, 240(1):32–44. 10.1016/j.physd.2010.08.004
Li FF, Lu XW: Complete synchronization of temporal Boolean networks. Neural Netw. 2013, 44: 72–77.
Ma J, Li F, Huang L, Jin WY: Complete synchronization, phase synchronization and parameters estimation in a realistic chaotic system. Commun. Nonlinear Sci. Numer. Simul. 2011, 16(9):3770–3785. 10.1016/j.cnsns.2010.12.030
Wu XJ, Lu HT: Generalized function projective (lag, anticipated and complete) synchronization between two different complex networks with nonidentical nodes. Commun. Nonlinear Sci. Numer. Simul. 2012, 17(7):3005–3021. 10.1016/j.cnsns.2011.10.035
Yao CG, Zhao Q, Yu J: Complete synchronization induced by disorder in coupled chaotic lattices. Phys. Lett. A 2013, 377(5):370–377. 10.1016/j.physleta.2012.12.004
Chen Q, Ren XM, Na J: Robust anti-synchronization of uncertain chaotic systems based on multiple-kernel least squares support vector machine modeling. Chaos Solitons Fractals 2011, 44(12):1080–1088. 10.1016/j.chaos.2011.09.001
Fu GY, Li ZS: Robust adaptive anti-synchronization of two different hyperchaotic systems with external uncertainties. Commun. Nonlinear Sci. Numer. Simul. 2011, 16(1):395–401. 10.1016/j.cnsns.2010.05.015
Liu ST, Liu P: Adaptive anti-synchronization of chaotic complex nonlinear systems with unknown parameters. Nonlinear Anal., Real World Appl. 2011, 12(6):3046–3055. 10.1016/j.nonrwa.2011.05.006
Wu YQ, Li CP, Yang AL, Song LJ, Wu YJ: Pinning adaptive anti-synchronization between two general complex dynamical networks with non-delayed and delayed coupling. Appl. Math. Comput. 2012, 218(14):7445–7452. 10.1016/j.amc.2012.01.007
Zhang GD, Shen Y, Wang LM: Global anti-synchronization of a class of chaotic memristive neural networks with time-varying delays. Neural Netw. 2013, 46: 1–8.
Zhao HY, Zhang Q: Global impulsive exponential anti-synchronization of delayed chaotic neural networks. Neurocomputing 2011, 74(4):563–567. 10.1016/j.neucom.2010.09.016
Li D, Li XL, Cui D, Li ZH: Phase synchronization with harmonic wavelet transform with application to neuronal populations. Neurocomputing 2011, 74(17):3389–3403. 10.1016/j.neucom.2011.05.022
Odibat Z: A note on phase synchronization in coupled chaotic fractional order systems. Nonlinear Anal., Real World Appl. 2012, 13(2):779–789. 10.1016/j.nonrwa.2011.08.016
Taghvafard H, Erjaee GH: Phase and anti-phase synchronization of fractional order chaotic systems via active control. Commun. Nonlinear Sci. Numer. Simul. 2011, 16(10):4079–4088. 10.1016/j.cnsns.2011.02.015
Feng JW, Dai AD, Xu C, Wang JY: Designing lag synchronization schemes for unified chaotic systems. Comput. Math. Appl. 2011, 61(8):2123–2128. 10.1016/j.camwa.2010.08.092
Guo WL: Lag synchronization of complex networks via pinning control. Nonlinear Anal., Real World Appl. 2011, 12(5):2579–2585. 10.1016/j.nonrwa.2011.03.007
Ji DH, Jeong SC, Park JH, Lee SM, Won SC: Adaptive lag synchronization for uncertain complex dynamical network with delayed coupling. Appl. Math. Comput. 2012, 218(9):4872–4880. 10.1016/j.amc.2011.10.051
Pourdehi S, Karimaghaee P, Karimipour D: Adaptive controller design for lag-synchronization of two non-identical time-delayed chaotic systems with unknown parameters. Phys. Lett. A 2011, 375(17):1769–1778. 10.1016/j.physleta.2011.02.008
Wang LP, Yuan ZT, Chen XH, Zhou ZF: Lag synchronization of chaotic systems with parameter mismatches. Commun. Nonlinear Sci. Numer. Simul. 2011, 16(2):987–992. 10.1016/j.cnsns.2010.04.029
Wang ZL, Shi XR: Lag synchronization of two identical Hindmarsh-Rose neuron systems with mismatched parameters and external disturbance via a single sliding mode controller. Appl. Math. Comput. 2012, 218(22):10914–10921. 10.1016/j.amc.2012.04.054
Xing ZW, Peng JG: Exponential lag synchronization of fuzzy cellular neural networks with time-varying delays. J. Franklin Inst. 2012, 349(3):1074–1086. 10.1016/j.jfranklin.2011.12.008
Yang XS, Zhu QX, Huang CX: Generalized lag-synchronization of chaotic mix-delayed systems with uncertain parameters and unknown perturbations. Nonlinear Anal., Real World Appl. 2011, 12(1):93–105. 10.1016/j.nonrwa.2010.05.037
Yu J, Hu C, Jiang HJ, Teng ZD: Exponential lag synchronization for delayed fuzzy cellular neural networks via periodically intermittent control. Math. Comput. Simul. 2012, 82(5):895–908. 10.1016/j.matcom.2011.11.006
Farivar F, Shoorehdeli MA, Nekoui MA, Teshnehlab M: Generalized projective synchronization of uncertain chaotic systems with external disturbance. Expert Syst. Appl. 2011, 38(5):4714–4726. 10.1016/j.eswa.2010.08.104
Li ZB, Zhao XS: Generalized function projective synchronization of two different hyperchaotic systems with unknown parameters. Nonlinear Anal., Real World Appl. 2011, 12(5):2607–2615. 10.1016/j.nonrwa.2011.03.009
Si GQ, Sun ZY, Zhang YB, Chen WQ: Projective synchronization of different fractional-order chaotic systems with non-identical orders. Nonlinear Anal., Real World Appl. 2012, 13(4):1761–1771. 10.1016/j.nonrwa.2011.12.006
Wang S, Yu YG, Wen GG: Hybrid projective synchronization of time-delayed fractional order chaotic systems. Nonlinear Anal. Hybrid Syst. 2014, 11: 129–138.
Wang XY, Fan B: Generalized projective synchronization of a class of hyperchaotic systems based on state observer. Commun. Nonlinear Sci. Numer. Simul. 2012, 17(2):953–963. 10.1016/j.cnsns.2011.06.016
Wu XJ, Wang H, Lu HT: Hyperchaotic secure communication via generalized function projective synchronization. Nonlinear Anal., Real World Appl. 2011, 12(2):1288–1299. 10.1016/j.nonrwa.2010.09.026
Xiao JW, Wang ZW, Miao WT, Wang YW: Adaptive pinning control for the projective synchronization of drive-response dynamical networks. Appl. Math. Comput. 2012, 219(5):2780–2788. 10.1016/j.amc.2012.09.005
Yu YG, Li HX: Adaptive hybrid projective synchronization of uncertain chaotic systems based on backstepping design. Nonlinear Anal., Real World Appl. 2011, 12(1):388–393. 10.1016/j.nonrwa.2010.06.024
Zhou P, Zhu W: Function projective synchronization for fractional-order chaotic systems. Nonlinear Anal., Real World Appl. 2011, 12(2):811–816. 10.1016/j.nonrwa.2010.08.008
Luo RZ, Wang YL, Deng SC: Combination synchronization of three classic chaotic systems using active backstepping design. Chaos 2011., 21(4): Article ID 043114
Sun JW, Shen Y, Zhang GD, Xu CJ, Cui GZ: Combination-combination synchronization among four identical or different chaotic systems. Nonlinear Dyn. 2013, 73(3):1211–1222. 10.1007/s11071-012-0620-y
Acknowledgements
The author would like to express the sincere gratitude to Editor for handling the process of reviewing the paper, as well as to the reviewers who carefully reviewed the manuscript. The work is supported by the Natural Science Foundation of China under Grant 61304057.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Author’s contributions
The author drafted the manuscript, read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Wu, A. Hyperchaos synchronization of memristor oscillator system via combination scheme. Adv Differ Equ 2014, 86 (2014). https://doi.org/10.1186/1687-1847-2014-86
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-86