
Abstract
In this article, we investigate the local and global stability conditions of equilibrium points of discrete-time dynamic model with and without Allee effect. We conclude that the Allee effect decreases both the local stability and the global stability of equilibrium points of the population dynamic model. The results are confirmed with a numerical simulation.
MSC: 39A10, 39A30.
Similar content being viewed by others

1 Introduction
It is well known that the Allee effect plays an important role in the stability analysis of equilibrium points of a population dynamics model (see, for instance, [1–13]). The Allee effect, first introduced by Allee [14] in 1931, represents a negative density dependence when the population growth rate is reduced at low population size. It may be due to a number of sources including difficulties in finding mates, inbreeding depression, food exploitation, predator avoidance of defense, and social dysfunction at small population sizes.
Real-world problems can be solved by examining the models created via differential or difference equations. The population models in ecology and biology are generally confirmed by such equations (see, for instance, [9, 14–16]). To examine the dynamics of the population requires stability analysis. For local asymptotic stability, solutions must approach an equilibrium point under initial conditions close to the equilibrium point. In global asymptotic stability, solutions must approach to an equilibrium point under all initial conditions. The global asymptotic stability has been investigated in (see, for instance, [17–19]). Since a globally attractive equilibrium point is locally attractive, a globally asymptotically stable equilibrium point is locally asymptotically stable. Also, if the function is continuous, global asymptotic stability and global attractiveness are equivalent. In this study, we are not concerned with global attractiveness, which is derived with the help of solutions of the equation. The purpose of this paper is to investigate the local and global stability of an equilibrium point analytically with and without Allee effect and to compare the stability of these models. Therefore, this article exposes the impact of the Allee effect on the local and global stability of an equilibrium point in a nonlinear discrete-time population model. The positive equilibrium point of the model which is subject to an Allee effect can become either one of destabilization (see, for instance, [11, 13]) or of stabilization (see, for instance, [1, 5, 7, 10]). Namely, the local stability of a positive equilibrium point can be changed from the stable case to an unstable case or vice versa. It is also possible that even if the model is stable at an equilibrium point, to reach its equilibrium point may take a much longer time. This case has been referred to in the statement that the ‘Allee effect decreases the local stability of the equilibrium point’ (see, for instance, [6, 8, 12]).
In [20], a linear population model depending on birth and death rates was introduced:
Here, is the population density at time t, and r () is a growth rate. Unfortunately, this model neglects many important aspects of biological reality, since most of the parameters connected to the interactions among individuals are overlooked. Thus, nonlinear population models offer a more realistic approach than linear population models.
In this paper, we consider the following nonlinear discrete-time population model:
where represents interactions (competitions) among mature individuals, and r is the growth rate such that . The following assumptions are imposed on the function f:
-
(i)
for ; i.e., as the density increases, f decreases continuously. Biologically speaking, social dysfunction never increases as the population size increases.
-
(ii)
has a finite positive value.
If the population model of (1) is subject to the Allee effect, the following nonlinear population model is used:
The function f satisfies the conditions (i) and (ii). Note that since is related to the normalized per capita growth rate given by , (1) and (2) have the same equilibrium point. Here, is the Allee function at time t. The following assumptions on the Allee function are derived from biological facts:
-
(iii)
If there are no partners, there is no reproduction. Mathematically speaking, the Allee function is zero when the population density is zero.
-
(iv)
The Allee effect increases as the density increases. Mathematically speaking, the derivatives of the Allee function are always positive for all positive values.
-
(v)
The Allee effect disappears at high densities. Namely, the limit of the Allee function approaches 1 as the population size increases.
The remainder of the article is organized as follows: Section 2 is concerned with a local stability analysis of the equilibrium points of (1) with and without Allee effect. In Section 3, we give a global stability analysis of the equilibrium points of (1) with and without the Allee effect. In Section 4, we present numerical simulations to corroborate our results. The final section is devoted to conclusions and remarks.
2 Local stability analysis of (1) with and without Allee effect
We will begin by reviewing some definitions and theorems (see, for instance, [15]) which will be useful in our study of the stability analysis of (1).
Definition 1 is defined as an equilibrium point of (1) if the following equality holds:
Theorem 2 Let be a positive equilibrium point of (1). Assume that is continuous on an open interval I containing an equilibrium point. Then is locally asymptotically stable if
and unstable if
Definition 3 is defined as the period for (1) if
We will examine the local stability of the equilibrium point of (1) with and without the Allee effect. Assume that (1) and (2) have an unique positive equilibrium point . Namely, there is no equilibrium point except such that .
We then obtain the following theorem.
Theorem 4 Let be a positive equilibrium point of (1) with respect to r. Then is locally stable if the inequality
holds.
Proof In light of (i)-(ii), we can say that is a continuous function. The linearized form of (1) in a neighborhood of is given by
such that . By applying Theorem 2, we find that
Thus the inequality (3) is proved for . □
Theorem 5 Let be a positive equilibrium point of (2) by the Allee effect at time t with respect to . Then is locally stable if the inequality
holds.
Proof From (i)-(v), we can say that is a continuous function. The linearized form of (2) in a neighborhood of is given by
such that . By applying Theorem 2, we have
Here, and . The second derivative of the function f is
Since f decreases, it is written
From this, we get the following inequality:
so that . Let us consider the first and second derivatives of the function as follows:
such that in the case of . Consequently, we get so that is a convex function. Also it is seen that for . Since is an increasing function in , we can write . We then obtain the following:
If the last inequality and inequality (5) are considered, then (4) is confirmed easily. □
Corollary 6 It can be seen from (3) and (4) that the Allee effect decreases the local stability of an equilibrium point of (1). Namely, it is easy to see that the local stability of an equilibrium point of (1) is stronger than the local stability of an equilibrium point of (2).
3 Global stability analysis of (1) with and without Allee effect
In this section, we will present the global stability analysis of an equilibrium point of (1) with and without Allee effect. We shall require the following global stability theorem and definition (see, for instance, [15]) for (1).
Definition 7 is said to be globally asymptotically stable if it is globally attractive and locally stable.
Theorem 8 Let the function F at (1) be continuous such that , , if for all , then the origin is globally asymptotically stable.
We then obtain the following theorem.
Theorem 9 The equilibrium point is globally asymptotically stable if
Proof The function of F at (1) is continuous such that . The linearized equation about is
such that . Let us take . Since from condition (i) with , we can write
Now, we must satisfy for the global stability of the zero equilibrium point (origin) as follows:
It follows that . By Theorem 8, the origin is globally asymptotically stable. Therefore, the equilibrium point of (1) is globally asymptotically stable. □
3.1 The Allee effect at time t
We will now consider the following nonlinear discrete-time dynamical system with Allee effect at time t, given by (2):
According to the information, has a unique positive equilibrium point .
We then obtain the following theorem.
Theorem 10 The equilibrium point of (7) is globally asymptotically stable if
Proof The function at (7) is continuous function such that . The linearized equation about is
such that . Since from condition (i), we can write
such that . If , then
If , we have
Let us take , provided that . It is clear from Theorem 8 that the origin is globally asymptotically stable. Then is globally asymptotically stable. Note that is always true from Theorem 5. Namely, always. Since this inequality is related with , we must take this inequality as stability conditions. □
Corollary 11 The Allee effect at time t decreases the global stability of an equilibrium point. (If (6) and (8) are considered, it can easily be seen.)
Corollary 12 It is clear from (1) that is locally stable but not globally stable if the inequality
holds. (The proof is clear from Theorems 4 and 9.)
4 Numerical simulations
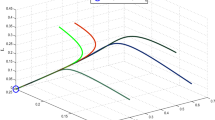
In this section, we corroborate our results numerically by using Maple and Matlab. As an example, we consider
Figure 1 shows a graph which demonstrates the dynamics of the population model based on these functions with and without the Allee effect with respect to time for different values of r. Figures 2 and 3 show the graphs of the same coordinate plane of and the population density functions and for and , respectively. So, we confirm that the Allee effect decreases the local stability and global stability of the equilibrium point of the population model. It is clear that (1) is not globally stable at each locally stable point.

The local stability of models ( 1 ) and ( 2 ). (a) Density-time graphs of the models and where and with the initial condition and . (b) Density-time graphs of the models and where and with the initial condition and .

Graphs for functions ( 1 ) and ( 2 ) with . (a) Graphs of the same coordinate plane of and the population density function in (1) where and . (b) Graphs of the same coordinate plane of and the population density function in (2) where , , and .

Graphs for functions ( 1 ) and ( 2 ) with . (a) Graphs of the same coordinate plane of and the population density function in (1) where and . (b) Graphs of the same coordinate plane of and the population density function in (2) where , , and .
5 Conclusions and remarks
This paper focused on the global and local stability analysis of the first-order discrete population models with and without the Allee effect, defined by (2) and (1), respectively. Firstly, local asymptotic stability conditions were investigated for the equilibrium points of both models. Secondly, the global stability of the equilibrium points of the models was also evaluated. Finally, we compared the global and local stability of the equilibrium points of these two models. Consequently, the Allee effect decreases the local stability and the global stability of the equilibrium points of (1).
References
Fowler MS, Ruxton GD: Population dynamics consequences of Allee effects. J. Theor. Biol. 2002, 215: 39-46. 10.1006/jtbi.2001.2486
Jang SR-J: Allee effects in a discrete-time host-parasitoid model with stage structure in the host. Discrete Contin. Dyn. Syst., Ser. B 2007, 8: 145-159.
López-Ruiz R, Fournier-Prunaret D: Indirect Allee effect, bistability and chaotic oscillations in a predator-prey discrete model of logistic type. Chaos Solitons Fractals 2005, 24: 85-101. 10.1016/j.chaos.2004.07.018
McCarthy MA: The Allee effect, finding mates and theoretical models. Ecol. Model. 1997, 103: 99-102. 10.1016/S0304-3800(97)00104-X
Merdan H, Duman O: On the stability analysis of a general discrete-time population model involving predation and Allee effects. Chaos Solitons Fractals 2009, 40: 1169-1175. 10.1016/j.chaos.2007.08.081
Ak Gümüş Ö, Köse H: On the stability of delay population dynamics related with Allee effects. Math. Comput. Appl. 2012, 17(1):56-67.
Ak Gümüş Ö, Köse H: Allee effect on a new delay population model and stability analysis. J. Pure Appl. Math. Adv. Appl. 2012, 7(1):21-31.
Merdan H, Ak Gümüş Ö: Stability analysis of a general discrete-time population model involving delay and Allee effects. Appl. Math. Comput. 2012, 219: 1821-1832. 10.1016/j.amc.2012.08.021
Murray JD: Mathematical Biology. Springer, New York; 1993.
Scheuring I: Allee effect increases the dynamical stability of populations. J. Theor. Biol. 1999, 199: 407-414. 10.1006/jtbi.1999.0966
Zhou SR, Liu YF, Wang G: The stability of predator-prey systems subject to the Allee effects. Theor. Popul. Biol. 2005, 67: 23-31. 10.1016/j.tpb.2004.06.007
Duman O, Merdan H: Stability analysis of continuous population model involving predation and Allee effect. Chaos Solitons Fractals 2009, 41: 1218-1222. 10.1016/j.chaos.2008.05.008
Zu J, Mimura M: The impact of Allee effect on a predator-prey system with Holling II functional response. Appl. Math. Comput. 2010, 217: 3542-3556. 10.1016/j.amc.2010.09.029
Allee WC: Animal Aggregations: A Study in General Sociology. University of Chicago Press, Chicago; 1931.
Allen LJS: An Introduction to Mathematical Biology. Pearson Education, Upper Saddle River; 2007.
Elaydi S: An Introduction to Difference Equations. Springer, New York; 2006.
Kocić VL, Ladas G: Global Behavior of Nonlinear Difference Equations of Higher Order with Applications. 1993.
Cull P: Local and global stability of discrete one-dimensional population models. In Biomathematics and Related Computational Problems. Edited by: Ricciardi LM. Kluwer Academic, Dordrecht; 1988:271-278.
Nenya OI, Tkachenko VI, Trafymchuk SI: On the global stability of one nonlinear difference equation. Nonlinear Oscil. 2004, 7: 473-480. 10.1007/s11072-005-0027-5
Brauer F, Castillo-Chavez C: Mathematical Models in Population Biology and Epidemiology. 2012.
Acknowledgements
The author would like to sincerely thank the anonymous referees for their careful reading of the manuscript and valuable suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares to have no competing interests.
Author’s contributions
The author read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Ak Gümüş, Ö. Global and local stability analysis in a nonlinear discrete-time population model. Adv Differ Equ 2014, 299 (2014). https://doi.org/10.1186/1687-1847-2014-299
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-299