
Abstract
This paper is concerned with chaotification of linear delay difference equations via the feedback control technique. The controlled system is first reformulated into a linear discrete dynamical system. Then, a chaotification theorem based on the snap-back repeller theory for maps is established. The controlled system is proved to be chaotic in the sense of both Devaney an Li-Yorke. An illustrative example is provided with computer simulations.
MSC:34C28, 37D45, 74H65.
Similar content being viewed by others


1 Introduction
Chaotification (or called anticontrol of chaos) is a process that makes a nonchaotic system chaotic, or enhances a chaotic system to present stronger or different type of chaos. In recent years, it has been found that chaos can actually be useful under some circumstances, for example, in human brain analysis [1, 2], heartbeat regulation [3, 4], encryption [5], digital communications [6], etc. So, sometimes it is useful and even important to make a system chaotic or create new types of chaos. It has attracted increasing interest in research on chaotification of dynamical systems due to the great potentials of chaos in many nontraditional applications.
In the pursuit of chaotifying discrete dynamical systems, a simple yet mathematically rigorous chaotification method was first developed by Chen and Lai [7–9] from a feedback control approach. They showed that the Lyapunov exponents of a controlled system are positive [7], and the controlled system via the mod-operation is chaotic in the sense of Devaney when the original system is linear and is chaotic in a weaker sense of Wiggins when the original system is nonlinear [9]. Later, Wang and Chen [10] further showed that the Chen-Lai algorithm for chaotification also leads to chaos in the sense of Li-Yorke. This method plays an important role in studying chaotification problems of discrete dynamical systems. Recently, Shi and Chen [11] studied chaotification for some discrete dynamical systems governed by continuous maps and showed that the controlled systems are chaotic in the sense of both Devaney and Li-Yorke. It is noticed that all the above chaotification problems for discrete dynamical systems are formulated in finite-dimensional real spaces. More recently, Shi et al. [12] first studied chaotification for discrete dynamical systems in Banach spaces via the feedback control technique. They showed that some controlled systems in finite-dimensional real spaces studied by [9] and [13] are chaotic in the sense of Devaney as well as in the sense of both Li-Yorke and Wiggins. Particularly, they extended and proved the Marotto theorem to general Banach spaces [14], established some chaotification theorems for discrete dynamical systems in (infinite-dimensional) Banach spaces [12], and showed the controlled systems are chaotic in the sense of both Devaney and Li-Yorke. The reader is referred to Chen and Shi [15] for a survey of chaotification of discrete dynamical systems and some references cited therein.
Time delay arises in many realistic systems with feedback in science and engineering. The delay difference equations have been studied by many researchers. Although there exist some general chaotification schemes for finite-dimensional or infinite-dimensional discrete dynamical systems as stated in the above, there are few results on the chaotification of linear delay difference equations. In this paper, we employ the Chen-Lai method, from the feedback control approach to study chaotification of linear delay difference equations and prove that the controlled system is chaotic in the sense of both Devaney and Li-Yorke by applying the snap-back repeller theory; see [14, 16, 17] for the theory.
The rest of the paper is organized as follows. In Section 2, the chaotification problem under investigation is described, and some concepts, one lemma, and reformulation of the controlled system are introduced. In Section 3, the chaotification problem is studied and a chaotification criterion is established. Finally, we provide an example to illustrate the theoretical result with computer simulations in Section 4.
2 Preliminaries
In this section, we describe the chaotification problem, give a reformulation of the linear delay difference equation, and introduce some fundamental concepts and a criterion of chaos, which will be used in the next section.
2.1 Description of chaotification problem
Consider the following linear delay difference equation:
where is a fixed integer and , , are constant parameters.
The object is to design a simple control input sequence such that the output of the controlled system
is chaotic in the sense of both Devaney and Li-Yorke (see Definitions 1 and 2 below). The controller to be designed in this paper is in the form of
where β and , , are undetermined parameters.
2.2 Reformulation
In this subsection, we reformulate equations (1) and (2) into -dimensional discrete dynamical systems. By setting
equation (1) and the controlled system (2) with controller (3) can be written as the following discrete systems on :
respectively, where ,
, and the map is given by
Systems (4) and (5) are said to be induced by equations (1) and (2), respectively. It is easy to see that the dynamical behaviors of equations (1) and (2) are the same as those of their induced systems (4) and (5), respectively.
2.3 Some concepts and a criterion of chaos
Since Li and Yorke [18] first introduced a precise mathematical definition of chaos, there appeared several different definitions of chaos, some are stronger and some are weaker, depending on the requirements in different problems; see [19–22]etc. For convenience, we list two definitions of chaos in the sense of Li-Yorke and Devaney, which are used in the paper.
Definition 1 Let be a metric space, be a map, and S be a set of X with at least two distinct points. Then S is called a scrambled set of f if for any two distinct points ,
The map f is said to be chaotic in the sense of Li-Yorke if there exists an uncountable scrambled set S of f.
Definition 2 [19]
Let be a metric space. A map is said to be chaotic on V in the sense of Devaney if
-
(i)
the set of the periodic points of f is dense in V;
-
(ii)
f is topologically transitive in V;
-
(iii)
f has sensitive dependence on initial conditions in V.
In 1992, Banks et al. [23] proved that conditions (i) and (ii) together imply condition (iii) if f is continuous in V. So, condition (iii) is redundant in the above definition in this case. It has been proved in [24] that under some conditions, chaos in the sense of Devaney is stronger than that in the sense of Li-Yorke.
Now, we introduce some relative concepts for system (2), which are motivated by [[12], Definitions 5.1 and 5.2].
Definition 3
-
(i)
A point is called an m-periodic point of system (2) if is an m-periodic point of its induced system (5), that is, , , . In the special case of , x is called a fixed point or a steady state of system (2).
-
(ii)
The concepts of density of periodic points, topological transitivity, sensitive dependence on initial conditions, and the invariant set for system (2) are defined similarly to those for its induced system (5) in .
-
(iii)
System (2) is said to be chaotic in the sense of Devaney (or Li-Yorke) on if its induced system (5) is chaotic in the sense of Devaney (or Li-Yorke) on .
In this paper, we will use the criterion of chaos established by Shi et al. to chaotify the linear delay difference equation (1). For convenience, we state it as follows.
Lemma 1 ([[12], Theorem 2.1], [[14], Theorem 4.4])
Let be a map with a fixed point . Assume that
-
(i)
f is continuously differentiable in a neighborhood of z and all the eigenvalues of have absolute values larger than 1, which implies that there exist a positive constant r and a norm in such that f is expanding in in , where is the closed ball of radius r centered at z in ;
-
(ii)
z is a snap-back repeller of f with , , for some and some positive integer m, where is the open ball of radius r centered at z in . Furthermore, f is continuously differentiable in some neighborhoods of , respectively, and for , where for .
Then for each neighborhood U of z, there exist a positive integer and a Cantor set such that is topologically conjugate to the symbolic dynamical system . Consequently, there exists a compact and perfect invariant set , containing the Cantor set Λ, such that f is chaotic on V in the sense of Devaney as well as in the sense of Li-Yorke, and has a dense orbit in V.
Remark 1 Lemma 1 extends and improves the Marroto theorem [17]. Under the conditions of Lemma 1, z is a regular and nondegenerate snap-back repeller. Therefore, Lemma 1 can be briefly stated as follows: ‘a regular and nondegenerate snap-back repeller in implies chaos in the sense of both Devaney and Li-Yorke’. We refer to [12, 14] for details.
3 Chaotification for linear delay difference equations
In this section, we will show that the controlled system (5) with a single-input state feedback controller (3), i.e., the controlled system (2) with controller (3), is chaotic in the sense of both Devaney and Li-Yorke for some parameters β and , .
Consider the fixed points of system (5). It is obvious that is always a fixed point, and other fixed points satisfy the following equation:
In the following, we only show the fixed point O can be a regular and nondegenerate snap-back repeller of system (5) under some conditions.
Theorem 1 There exist some constants and , , with
such that the controlled system (5), and consequently system (2), is chaotic in the sense of both Devaney and Li-Yorke.
Proof We will use Lemma 1 to prove this theorem. So, it suffices to show that all the conditions in Lemma 1 are satisfied. As assumed in the statement of the theorem, let β and satisfy condition (7) throughout the proof.
First, we will show that O is an expanding fixed point of F in some norm in . In fact, F is continuously differentiable in , and the Jacobian matrix of F at O is
Its eigenvalues are determined by
It follows from (8) and the second relation of condition (7) that all the eigenvalues of have absolute values larger than 1 in norm. Otherwise, suppose that there exists an eigenvalue of with , then we get the following inequality:
which is a contradiction. Hence, it follows from the first condition of Lemma 1, there exist a positive constant r and a norm in such that O is an expanding fixed point of F in in the norm , that is,
where is an expanding coefficient of F in and is the closed ball centered at of radius r with respect to the norm .
From (6) and (7), we see that for sufficiently large β and , the absolute value of can become very small. So, the distance of the fixed points O and P can be very small, and consequently, the r obtained above will be less than 1.
Next, we show O is a snap-back repeller of F in the norm . For fixed and sufficiently large β and , the equation
has a solution near 0, which implies that with . It follows from the first relation of (7) that , . Let
Then
Set , . We can easily get that for , and
which implies that O is a snap-back repeller of F.
Finally, we show that
A direct calculation shows that for any ,
So, the following inequalities:
can be carried out from equations (9) and (10) by choosing sufficiently large β. Therefore, all the assumptions in Lemma 1 are satisfied and O is a regular and nondegenerate snap-back repeller of system (5). So, system (5), i.e., equation (2), is chaotic in the sense of both Devaney and Li-Yorke. The proof is complete. □
Remark 2 Zhang and Chen [25], Kwok and Tang [26] had independently studied the chaotification of system (4) with the following single-input controllers:
respectively, where and , , , are undetermined parameters. They showed that the controlled system is chaotic in the sense of Li-Yorke by using the Marotto theorem. However, there exists some problem in their proofs. We state as follows. By the definition of a snap-back repeller, if a point z is a snap-back repeller of a map g, then z is an expanding fixed point of g in for some , and there exists a point with such that for some positive integer m. It is easy to show that there must exist a positive integer such that . However, in the proofs of both [25] and [26], they all proved that the map g of the controlled system is expanding in a neighborhood of the origin , and there exists a point such that and , and consequently O is a snap-back repeller of the map g. This is a contradiction with the definition of a snap-back repeller. In this paper, we use controller (3) to chaotify the linear delay system (1), which corresponds to the chaotification of linear system (4) with the following single-input controller:
This controller is slightly different from that used in [25]. However, the problem is solved, and it is rigorously proved that system (4) with the above controller is chaotic in the sense of both Devaney and Li-Yorke by using the snap-back repeller theory.
4 An example
In the last section, we present an example of chaotification for a linear delay difference equation with computer simulations.
Example 1 The linear delay difference equation (1) is taken as the following:
where is a fixed integer.
Obviously, is a fixed point of equation (11). By Theorem 1, we can take controller (3) with β and , , as specified in the proof, such that the output of the controlled system (5), i.e., system (2), is chaotic in the sense of both Devaney and Li-Yorke. In order to help better visualize the theoretical result, we take for computer simulations. For , we can take
For , we take
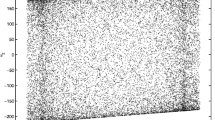
Both of them satisfy the condition (7). The simulated results show that the origin system (4), i.e., system (11), has simple dynamical behaviors, and the controlled system (5), i.e., system (2), has complex dynamical behaviors, see Figures 1-4.

2-D computer simulation result shows simple dynamical behaviors of the uncontrolled system ( 4 ) in the space for .

2-D computer simulation result shows complex dynamical behaviors of the controlled system ( 5 ) in the space for , , , .

3-D computer simulation result shows simple dynamical behaviors of the uncontrolled system ( 4 ) in the space for .

3-D computer simulation result shows complex dynamical behaviors of the controlled system ( 5 ) in the space for , , , , .
References
Freeman WJ: Chaos in the brain: possible roles in biological intelligence. Int. J. Intell. Syst. 1995, 10: 71-88. 10.1002/int.4550100107
Schiff SJ, Jerger K, Duong DH, Chang T, Spano ML, Ditto WL: Controlling chaos in the brain. Nature 1994, 370: 615-620. 10.1038/370615a0
Brandt ME, Chen GR: Bifurcation control of two nonlinear of models of cardiac activity. IEEE Trans. Circuits Syst. I 1997, 44: 1031-1034. 10.1109/81.633897
Ditto WL, Spano ML, Nelf J, Meadows B, Langberg JJ, Bolmann A, McTeague K: Control of human atrial fibrillation. Int. J. Bifurc. Chaos 2000, 10: 593-602.
Jakimoski G, Kocarev LG: Chaos and cryptography: block encryption ciphers based on chaotic maps. IEEE Trans. Circuits Syst. I 2001, 48: 163-169. 10.1109/81.904880
Kocarev LG, Maggio M, Ogorzalek M, Pecora L, Yao K: Special issue on applications of chaos in modern communication systems. IEEE Trans. Circuits Syst. I 2001, 48: 1385-1527.
Chen GR, Lai DJ: Feedback control of Lyapunov exponents for discrete-time dynamical systems. Int. J. Bifurc. Chaos 1996, 6: 1341-1349. 10.1142/S021812749600076X
Chen GR, Lai DJ: Anticontrol of chaos via feedback. Proc. of IEEE Conference on Decision and Control 1997, 367-372.
Chen GR, Lai DJ: Feedback anticontrol of discrete chaos. Int. J. Bifurc. Chaos 1998, 8: 1585-1590. 10.1142/S0218127498001236
Wang XF, Chen GR: On feedback anticontrol of discrete chaos. Int. J. Bifurc. Chaos 1999, 9: 1435-1441. 10.1142/S0218127499000985
Shi YM, Chen GR: Chaotification of discrete dynamical systems governed by continuous maps. Int. J. Bifurc. Chaos 2005, 15: 547-556. 10.1142/S0218127405012351
Shi YM, Yu P, Chen GR: Chaotification of dynamical systems in Banach spaces. Int. J. Bifurc. Chaos 2006, 16: 2615-2636. 10.1142/S021812740601629X
Wang XF, Chen GR: Chaotification via arbitrary small feedback controls. Int. J. Bifurc. Chaos 2000, 10: 549-570.
Shi YM, Chen GR: Discrete chaos in Banach spaces. Sci. China Ser. A 2004, 34: 595-609. English version: 48, 222-238 (2005)
Chen GR, Shi YM: Introduction to anti-control of discrete chaos: theory and applications. Philos. Trans. R. Soc. Lond. A 2006, 364: 2433-2447. 10.1098/rsta.2006.1833
Shi YM, Chen GR: Chaos of discrete dynamical systems in complete metric spaces. Chaos Solitons Fractals 2004, 22: 555-571. 10.1016/j.chaos.2004.02.015
Marotto FR:Snap-back repellers imply chaos in .J. Math. Anal. Appl. 1978, 63: 199-223. 10.1016/0022-247X(78)90115-4
Li TY, Yorke JA: Period three implies chaos. Am. Math. Mon. 1975, 82: 985-992. 10.2307/2318254
Devaney RL: An Introduction to Chaotic Dynamical Systems. Addison-Wesley, New York; 1987.
Martelli M, Dang M, Steph T: Defining chaos. Math. Mag. 1998, 71: 112-122. 10.2307/2691012
Robinson C: Dynamical Systems: Stability, Symbolic Dynamics and Chaos. CRC Press, Boca Raton; 1995.
Wiggins S: Global Bifurcations and Chaos. Springer, New York; 1988.
Banks J, Brooks J, Cairns G, Davis G, Stacey P: On Devaney’s definition of chaos. Am. Math. Mon. 1992, 99: 332-334. 10.2307/2324899
Huang W, Ye XD: Devaney’s chaos or 2-scattering implies Li-Yorke’s chaos. Topol. Appl. 2002, 117: 259-272. 10.1016/S0166-8641(01)00025-6
Zhang HZ, Chen GR: Single-input multi-output state-feedback chaotification of general discrete systems. Int. J. Bifurc. Chaos 2004, 14: 3317-3323. 10.1142/S0218127404011223
Kwok HS, Tang WKS: Chaotification of discrete-time systems using neurons. Int. J. Bifurc. Chaos 2004, 14: 1405-1411. 10.1142/S0218127404009892
Acknowledgements
This work is supported by National Natural Science Foundation of China (Grant 11101246).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Li, Z. Chaotification for linear delay difference equations. Adv Differ Equ 2013, 59 (2013). https://doi.org/10.1186/1687-1847-2013-59
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-59