
Abstract
In this paper we are interested in the fractional-order form of Chua’s system. A discretization process will be applied to obtain its discrete version. Fixed points and their asymptotic stability are investigated. Chaotic attractor, bifurcation and chaos for different values of the fractional-order parameter are discussed. We show that the proposed discretization method is different from other discretization methods, such as predictor-corrector and Euler methods, in the sense that our method is an approximation for the right-hand side of the system under study.
Similar content being viewed by others

Introduction
In recent years differential equations with fractional order have attracted many researchers’ attention because of their applications in many areas of science and engineering; see, for example, [1, 2], and [3]. The need for fractional-order differential equations stems in part from the fact that many phenomena cannot be modeled by differential equations with integer derivatives. The fractional calculus has allowed the operations of integration and differentiation to be applied upon any fractional order. Recently, the theory of fractional differential equations attracted many scientists and mathematicians to work on [4–8]. For stability conditions and synchronization of a system of fractional-order differential equations, one can see [9–11].
We recall the basic definitions (Caputo) and properties of fractional order differentiation and integration.
Definition 1 The fractional integral of order of the function , , is defined by
and the fractional derivative of order of , , is defined by
In addition, the following results are the main ones in fractional calculus. Let , ,
-
, and if , then .
-
uniformly on , , where .
-
weakly.
-
If is absolutely continuous on , then .
To solve fractional-order differential equations, there are two famous methods: frequency domain methods [12] and time domain methods [13]. In recent years it has been shown that the second method is more effective because the first method is not always reliable in detecting chaos [14] and [15].
Often it is not desirable to solve a differential equation analytically, and one turns to numerical or computational methods.
In [16], a numerical method for nonlinear fractional-order differential equations with constant or time-varying delay was devised. It should be noticed that the fractional differential equations tend to lower the dimensionality of the differential equations in question; however, introducing delay in differential equations makes them infinite dimensional. So, even a single ordinary differential equation with delay could display chaos.
Dealing with fractional-order differential equations as dynamical systems is somehow new and has motivated the leading research literature recently; see, for example, [17, 18] and [19]. The non-local property of fractional differential equations means that the next state of a system not only depends on its current state but also on its historical states. This property is very close to the real world, and thus fractional differential equations have become popular and have been applied to dynamical systems.
On the other hand, some examples of dynamical systems generated by piecewise constant arguments were studied in [20–24].
Discretization process
In [25], a discretization process is introduced to discretize the fractional-order differential equations, and we take Riccati’s fractional-order differential equations as an example. We noticed that when the fractional-order parameter , Euler’s discretization method is obtained. In [26], the same discretization method is applied to the logistic fractional-order differential equation. We concluded that Euler’s method is able to discretize first-order difference equations; however, we succeeded in discretizing a second-order difference equation.
Here, we are interested in applying the discretization method to a system of differential equations like Chua’s system which is one of the autonomous differential equations capable of generating chaotic behavior. This system is well known and has been studied widely.
Let and consider the differential equation of fractional order
The corresponding equation with a piecewise constant argument
Let , then . So, we get
Thus
Let , then . So, we get
Thus
Let , then . So, we get
Thus
Repeating the process, we get when , then . So, we get
Thus
Consider Chua’s dynamical system with cubic nonlinearity (see [27, 28])
In [28], the author studied the effect of the fractional dynamics in Chua’s system. It has been demonstrated that the usual idea of system order must be modified when fractional derivatives are present.
Here, we are concerned with fractional-order Chua’s system given by
Actually, we are interested in discretizing fractional-order Chua’s system with piecewise constant arguments given in the form
with initial conditions , , and .
The proposed discretization method has the following steps.
(1) Let , then . So, we get
and the solution of (7) is given by
(2) Let , then . So, we get
and the solution of (7) is given by
Repeating the process, we can easily deduce that the solution of (7) is given by
Let , we obtain the discretization
which can be rewritten as
Remark 1 It should be noticed that if in (8), we deduce the Euler discretization method of Chua’s system [29].
It is worth to mention here that many discretization methods, such as Euler’s method and predictor-corrector method, have been applied to Chua’s system (4). Euler’s method discretization is an approximation for the derivative while the predictor-corrector method is an approximation for the integral. However, our proposed discretization method here is an approximation for the right-hand side as it is pretty clear from formula (8).
Fixed points and their asymptotic stability
Now we study the asymptotic stability of the fixed points of system (8) which has three fixed points:
-
,
-
,
-
.
By considering a Jacobian matrix for one of these fixed points and calculating their eigenvalues, we can investigate the stability of each fixed point based on the roots of the system characteristic equation [30].
Linearizing system (8) about yields the following characteristic equation:
where . Let
Now, let , , and . From the Jury test, if , , and , , , where , , , , and , then the roots of satisfy and thus is asymptotically stable. This is not satisfied here since γ and β are positive and so . That is, is unstable.
While linearizing system (8) about or yields the following characteristic equation:
We let , , and . From the Jury test, if , , and , , , where , , , , and , then the roots of satisfy and thus or is asymptotically stable. We can check easily that , that is, both and are unstable.
Attractors, bifurcation and chaos
Since the Lyapunov exponent is a good indicator for existence of chaos, we compute the Lyapunov characteristic exponents (LCEs) via the householder QR based methods described in [31]. LCEs play a key role in the study of nonlinear dynamical systems and they are the measure of sensitivity of solutions of a given dynamical system to small changes in the initial conditions. One feature of chaos is the sensitive dependence on initial conditions; for a chaotic dynamical system, at least one LCE must be positive. Since for non-chaotic systems all LCEs are non-positive, the presence of a positive LCE has often been used to help determine if a system is chaotic or not. We find that LCE1 = 0.0263, LCE2 = −0.0077, and LCE3 = −0.4160. Figure 1 shows the LCEs for system (8) for parameter values , , and with initial conditions .

Lyapunov characteristic exponents (LCEs) for system ( 8 ).
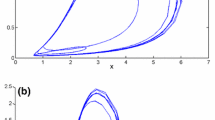
On the other hand, we show some attractors of system (8) for different α. The numerical experiments show that playing with the parameter α away from will not produce any bifurcation diagrams. Figures 2 and 3 show attractors of system (8), while Figures 4-13 show bifurcation diagrams for the same system.

Strange attractor of ( 8 ) with , , , .

Attractor of ( 8 ) with , , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .

Bifurcation diagram of ( 8 ) with , , .
Conclusion
A discretization method is introduced to discretize fractional-order differential equations and we take Chua’s system with cubic nonlinearity for our purpose. We have noticed that when , the discretization will be Euler’s discretization [29]. In addition, we carried out the numerical simulation when , we did not get any bifurcation at all. Actually, this is not surprising since we did the same in Rössler’s system in its discrete version. When we contacted Prof. Dr. Rössler himself about why we were not getting any bifurcation diagrams, he assured our results. Finally, it is not clear in this situation why the parameter α takes one value only to produce bifurcation and chaos diagrams.
On the other hand, we show some attractors of system (8) for different α. The numerical experiments show that playing with the parameter α away from will not produce any bifurcation diagrams.
References
Bhalekara S, Daftardar-Gejjib V, Baleanuc D, Magine R: Transient chaos in fractional Bloch equations. Comput. Math. Appl. 2012, 64: 3367-3376. 10.1016/j.camwa.2012.01.069
Faieghi M, Kuntanapreeda S, Delavari H, Baleanu D: LMI-based stabilization of a class of fractional-order chaotic systems. Nonlinear Dyn. 2013, 72: 301-309. 10.1007/s11071-012-0714-6
Golmankhaneh AK, Arefi R, Baleanu D: The proposed modified Liu system with fractional order. Adv. Math. Phys. 2013., 2013: Article ID 186037
Das S: Functional Fractional Calculus for System Identification and Controls. Springer, Berlin; 2007.
El-Sayed AMA, El-Mesiry A, El-Saka H: On the fractional-order logistic equation. Appl. Math. Lett. 2007, 20: 817-823. 10.1016/j.aml.2006.08.013
El-Sayed AMA: On the fractional differential equations. J. Appl. Math. Comput. 1992, 49(2-3):205-213. 10.1016/0096-3003(92)90024-U
El-Sayed AMA: Nonlinear functional-differential equations of arbitrary orders. Nonlinear Anal. 1998, 33: 181-186. 10.1016/S0362-546X(97)00525-7
Podlubny I: Fractional Differential Equations. Academic Press, London; 1999.
Matouk AE: Stability conditions, hyperchaos and control in a novel fractional order hyperchaotic system. Phys. Lett. A 2009, 373: 2166-2173. 10.1016/j.physleta.2009.04.032
Matouk AE: Chaos synchronization between two different fractional systems of Lorenz family. Math. Probl. Eng. 2009., 2009: Article ID 572724
Matouk AE: On some stability conditions and hyperchaos synchronization in the new fractional order hyperchaotic Chen system. Proceedings of the 3rd International Conference ICCSA 2009.
Sun H, Abdelwahed A, Onaral B: Linear approximation for transfer function with a pole of fractional order. IEEE Trans. Autom. Control 1984, 29: 441-444. 10.1109/TAC.1984.1103551
Diethelm K, Ford NJ, Freed AD: A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29: 3-22. 10.1023/A:1016592219341
Tavazoei MS, Haeri M: Unreliability of frequency domain approximation in recognizing chaos in fractional order systems. IET Signal Process. 2007, 1: 171-181. 10.1049/iet-spr:20070053
Tavazoei MS, Haeri M: Limitation of frequency domain approximation for detecting chaos in fractional order systems. Nonlinear Anal., Theory Methods Appl. 2008, 69: 1299-1320. 10.1016/j.na.2007.06.030
Wang Z: A numerical method for delayed fractional-order differential equations. J. Appl. Math. 2013., 2013: Article ID 256071
Erjaee GH: On analytical justification of phase synchronization in different chaotic systems. Chaos Solitons Fractals 2009, 3: 1195-1202.
Yan JP, Li CP: On chaos synchronization of fractional differential equations. Chaos Solitons Fractals 2007, 32: 725-735. 10.1016/j.chaos.2005.11.062
Wu, GC, Baleanu, D: Discrete fractional logistic map and its chaos. Nonlinear Dyn. (2013). doi:10.1007/s11071-013-1065-7. 10.1007/s11071-013-1065-7
Akhmet MU: Stability of differential equations with piecewise constant arguments of generalized type. Nonlinear Anal. 2008, 68: 794-803. 10.1016/j.na.2006.11.037
Akhmet, MU, Altntana, D, Ergenc, T: Chaos of the logistic equation with piecewise constant arguments. arXiv:1006.4753 (2010). e-printatarXiv.org
El-Sayed AMA, Salman SM: Chaos and bifurcation of discontinuous dynamical systems with piecewise constant arguments. Malaya J. Mat. 2012, 1: 14-18.
El-Sayed AMA, Salman SM: Chaos and bifurcation of the logistic discontinuous dynamical systems with piecewise constant arguments. Malaya J. Mat. 2013, 3: 14-20.
El-Sayed AMA, Salman SM: The unified system between Lorenz and Chen systems: a discretization process. Electron. J. Math. Anal. Appl. 2013, 1: 318-325.
El-Sayed AMA, Salman SM: On a discretization process of fractional order Riccati’s differential equation. J. Fract. Calc. Appl. 2013, 4: 251-259.
El-Sayed, AMA, Salman, SM: On a discretization process of fractional-order Logistic differential equation. J. Egypt. Math. Soc. (accepted)
Stegemann C, Albuquerque HA, Rech PC: Some two dimensional parameter space of a Chua system with cubic nonlinearity. Chaos, Interdiscip. J. Nonlinear Sci. 2007, 20: 817-823.
Hartely TT, Lorenzo CF, Qammer HK: Chaos in a fractional order Chau’s system. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 1995, 42: 485-490. 10.1109/81.404062
Elaidy SN Undergraduate Texts in Mathematics. In An Introduction to Difference Equations. 3rd edition. Springer, New York; 2005.
Holmgren R: A First Course in Discrete Dynamical Systems. Springer, New York; 1994.
Udwadia FE, von Bremen H: A note on the computation of the largest p -Lyapunov characteristic exponents for nonlinear dynamical systems. J. Appl. Math. Comput. 2000, 114: 205-214. 10.1016/S0096-3003(99)00113-7
Acknowledgements
The authors would like to thank the referees of this manuscript for their valuable comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors declare that the study was realized in collaboration with the same responsibility. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Agarwal, R.P., El-Sayed, A.M.A. & Salman, S.M. Fractional-order Chua’s system: discretization, bifurcation and chaos. Adv Differ Equ 2013, 320 (2013). https://doi.org/10.1186/1687-1847-2013-320
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-320