
Abstract
In this paper, we present a generalized concept of second-order differentiability for interval-valued functions. The global existence of solutions for interval-valued second-order differential equations (ISDEs) under generalized H-differentiability is proved. We present some examples of linear interval-valued second-order differential equations with initial conditions having four different solutions. Finally, we propose a new algorithm based on the analysis of a crisp solution. Some examples are given by using our proposed algorithm.
MSC:34K05, 34K30, 47G20.
Similar content being viewed by others

1 Introduction
The set-valued differential and integral equations are an important part of the theory of set-valued analysis. They have the important value of theory and application in control theory; and they were studied in 1969 by De Blasi and Iervolino [1]. Recently, set-valued differential equations have been studied by many authors due to their application in many areas. For the basic theory on set-valued differential and integral equations, the readers can be referred to the good books and papers [2–10] and references therein. The interval-valued analysis and interval differential equations (IDEs) are the particular cases of the set-valued analysis and set differential equations, respectively. In many cases, when modeling real-world phenomena, information about the behavior of a dynamic system is uncertain, and we have to consider these uncertainties to gain more models. Interval-valued differential and integro-differential equations are a natural way to model dynamic systems subject to uncertainties. Recently, many works have been done by several authors in the theory of interval-valued differential equations (see, e.g., [11–15]). There are several approaches to the study of interval differential equations. One popular approach is based on H-differentiability. The approach based on H-derivative has the disadvantage that it leads to solutions which have an increasing length of their support. Note that this definition of derivative is very restrictive; for instance, we can see that if , where A is an interval-valued constant and is a real function with , then is not differentiable. Recently, to avoid this difficulty, Stefanini and Bede [12] solved the above mentioned approach under strongly generalized differentiability of interval-valued functions. In this case, the derivative exists and the solution of an interval-valued differential equation may have decreasing length of the support, but the uniqueness is lost. The paper of Stefanini and Bede was a starting point for the topic of interval-valued differential equations (see [14–16]) and later also for fuzzy differential equations.
The connection between the fuzzy analysis and the interval analysis is very well known (Moore and Lodwick [17]). Interval analysis and fuzzy analysis were introduced as an attempt to handle interval uncertainty that appears in many mathematical or computer models of some deterministic real-world phenomena. In [18] authors considered n th-order fuzzy differential equations with initial value conditions and proved the local existence and uniqueness of solution for nonlinearities satisfying a Lipschitz condition. In [12, 19] authors studied the existence of the solutions to interval-valued and fuzzy differential equations involving generalized differentiability. Based on the results in [18], authors studied the local existence and uniqueness of solutions for fuzzy second-order integro-differential equations with fuzzy kernel under strongly generalized H-differentiability [20]. In [21]n th-order fuzzy differential equations (NFDEs) under generalized differentiability were discussed and the existence and uniqueness theorem of solution of NFDE was proved by using the contraction principle in a Banach space. In [22] authors developed the fuzzy improved Runge-Kutta-Nystrom method for solving a second-order fuzzy differential based on the generalized concept of higher-order fuzzy differentiability. Also, a very important generalization and development related to the subject of the present paper is in the field of fuzzy sets, i.e., fuzzy calculus and fuzzy differential equations under the generalized Hukuhara derivative. Recently, several works, e.g., [13, 23–43], have been done on set-valued differential equations, fuzzy differential equations, and fuzzy integro-differential equations, fractional fuzzy differential equations, and some methods for solving fuzzy differential equations [44–49].
In [12, 14, 15] the authors presented interval-valued differential equations under generalized Hukuhara differentiability which were given in the following form:
where denotes two kinds of derivatives, namely the classical Hukuhara derivative and the second type Hukuhara derivative (generalized Hukuhara differentiability). The existence and uniqueness of a Cauchy problem is then obtained under an assumption that the coefficients satisfy a condition with the Lipschitz constant (see [12]). The proof is based on the application of the Banach fixed point theorem. In [15], under the generalized Lipschitz condition, Malinowski obtained the existence and uniqueness of solutions to both kinds of IDEs.
In this paper, we study four kinds of solutions to ISDEs
The different types of solutions to ISDEs are generated by the usage of two different concepts of interval-valued second-order derivative. This direction of research is motivated by the results of Stefanini and Bede [12], Malinowski [14, 15] concerning deterministic IDEs with generalized interval-valued derivative.
This paper is organized as follows. In Section 2, we recall some basic concepts and notations about interval analysis and interval-valued differential equations. In Section 3, we present the global existence and uniqueness theorem of a solution to the interval-valued second-order differential equation under two kinds of the Hukuhara derivative. Some examples of linear second-order interval-valued differential equations with initial conditions having four different solutions are presented. In Section 4, we propose a new algorithm based on the analysis of a crisp solution.
2 Preliminaries
Let denote the family all nonempty, compact and convex subsets of ℝ. The addition and scalar multiplication in , we define as usual, i.e., for , , , where , and , then we have
Furthermore, let , and , then we have and . Let as above. Then the Hausdorff metric H in is defined as follows:
We notice that is a complete, separable and locally compact metric space.
We define the magnitude and length of by
respectively, where is the zero element of , which is regarded as one point.
The Hausdorff metric (2.1) satisfies the following properties:
for all and . Let . If there exists an interval such that , then we call C the Hukuhara difference of A and B. We denote the interval C by . Note that . It is known that exists in the case . Besides that, we can see [14] the following properties for :
-
If , exist, then ;
-
If , exist, then ;
-
If , exist, then there exist and ;
-
If , , exist, then there exist and .
Definition 2.1 We say that the interval-valued mapping is continuous at the point if for every there exists such that, for all such that , one has .
The strongly generalized differentiability was introduced in [12] and studied in [14, 38–40].
Definition 2.2 Let and . We say that X is strongly generalized differentiable of the first-order differential at t if there exists such that
-
(i)
for all sufficiently small, , and
or
-
(ii)
for all sufficiently small, , and
or
-
(iii)
for all sufficiently small, , and
or
-
(iv)
for all sufficiently small, , and the limits
(h at denominators means ). In this definition, case (i) ((i)-differentiability for short) corresponds to the classical H-derivative, so this differentiability concept is a generalization of the Hukuhara derivative.
The interval-valued differential equation , , where is supposed to be continuous, is equivalent to one of the integral equations
on the interval , under the strong differentiability condition, (i) or (ii), respectively. We notice that the equivalence between two equations in this lemma means that any solution is a solution for the other one.
Definition 2.3 Let and . We say that X is strongly generalized differentiable of the second-order differential at t if there exists such that
-
(i)
for all sufficiently small, , and the following limits hold (in the metric H)
or
-
(ii)
for all sufficiently small, , and the following limits hold (in the metric H)
or
-
(iii)
for all sufficiently small, , and the following limits hold (in the metric H)
or
-
(iv)
for all sufficiently small, , and the following limits hold (in the metric H)
In this paper we consider only the two first items of Definition 2.3. In the other cases, the derivative is trivial because it is reduced to a crisp element. Let us consider the interval-valued second differential equation initial value problem (ISDE) of the form
where is an interval-valued function of t, is an interval-valued function and the interval-valued variables , are defined as the derivatives of and , respectively.
Theorem 2.1 Let and be interval-valued functions, where . If X, are (i)-differentiable or (ii)-differentiable, then , and , are differentiable functions and
-
(i)
, where X and are (i)-differentiable;
-
(ii)
, where X is (i)-differentiable and is (ii)-differentiable;
-
(iii)
, where X is (ii)-differentiable and is (i)-differentiable;
-
(iv)
, where X and are (i)-differentiable.
Definition 2.4 Let and , we define:
-
(a)
The space of continuous functions X by with the distance
(2.3) -
(b)
The space of continuous functions by with the distance
(2.4)
where we assume that , exist and .
In this definition, we know that the space of continuous functions is a complete metric space with distance (2.3).
Lemma 2.2 is a complete metric space.
Based on Definition 2.3, there are two possible cases for each derivation, so there are four possible cases for the second-order derivation.
Theorem 2.2 Assume that is continuous. A mapping is a solution to problem (2.2) if and only if X and are continuous on and satisfy one of the following interval integral equations:
-
(i)
, where and are (i)-differentials, or
-
(ii)
, where is (i)-differential and is (ii)-differential, or
-
(iii)
, where is (ii)-differential and is (i)-differential, or
-
(iv)
, where and are (ii)-differentials.
Definition 2.5 Let , be interval-valued functions which are (i)-differentiable. If X, and their derivatives satisfy problem (2.2), we say X is a (i-i)-solution of problem (2.2).
Definition 2.6 Let , be interval-valued functions which are (i)-differentiable and (ii)-differentiable, respectively. If X, and their derivatives satisfy problem (2.2), we say X is a (i-ii)-solution of problem (2.2).
Definition 2.7 Let , be interval-valued functions which are (ii)-differentiable and (i)-differentiable, respectively. If X, and their derivatives satisfy problem (2.2), we say X is a (ii-i)-solution of problem (2.2).
Definition 2.8 Let , be interval-valued functions which are (ii)-differentiable. If X, and their derivatives satisfy problem (2.2), we say X is a (ii-ii)-solution of problem (2.2).
Theorem 2.3 Let be continuous, and suppose that there exist such that
for all , . Then problem (2.2) has a unique local solution on some intervals () for each case.
3 Global existence of solutions for interval-valued second-order differential equations
In this section of the paper, we shall consider again the following initial value problem for the interval-valued second-order differential equation (ISDE) of the form
for all , where .
Theorem 3.1 Assume that
(C1) is locally Lipschitzian in X, ;
(C2) , for all , where is a nondecreasing function for each , and the maximal solution of the scalar initial value problem
exists throughout I;
(C3) , and .
Then the largest interval of the existence of any solution of (3.1) for each case is I. In addition, if is bounded on I, then exists.
Proof Since the way of the proof is similar for four cases, we only prove the case X and are (i)-differentiable. By hypothesis (C1), there exists such that the unique solution of problem (3.1) exists on I. Let . Then . Taking , clearly, there exists a unique solution of (3.1) which is defined on with and . If , obviously, the theorem is proved. Hence we suppose and define , . Then we have
for all and . Further, by assumption (C3), it follows that . Now, we show that exists. In fact, for any , such that , we have
Since exists and is finite, taking the limits as and using the completeness of in the last inequality, we see that exists in . Define and consider the IVP
Therefore can be extended beyond β, which contradicts our assumption. In addition, since is bounded and nondecreasing on I, it follows that exists and is finite. □
Example 3.2 Consider the linear second-order IDE
where we assume that are continuous functions, then the solutions of (3.3) for each case are on .
We see that is locally Lipschitzian. If we let , then is a unique solution of second-order initial differential equation as follows:
on . In the other hand, we have
Therefore, the solutions of Example 3.2 are on .
Theorem 3.3 Assume that
(C4) , F is bounded on bounded sets, and there exists a local solution of problem (3.1) for every ;
(C5) , V is locally Lipschitzian in X, , as uniformly for . In addition,
where ;
(C6) the maximal solution of problem (3.2) exists on and is positive whenever .
Then, for every such that , problem (3.1) has a (i-i)-solution on , which satisfies the estimate , .
Proof Let denote the set of all functions X defined on with values in such that is a (i-i)-solution of problem (3.1) on and , . We define a partial order ≤ on as follows: the relation implies that and on . We shall first show that is nonempty. Indeed, by assumption (C4), there exists a (i-i)-solution of problem (3.1) defined on .
Let be any (i-i)-solution of (3.1) existing on . Define so that . Now, for small and using assumption (C5), we consider
using the Lipschitz condition in assumption (C5). Thus
Since
and is any (i-i)-solution of (3.1), we find that
On the other hand,
Therefore, we have the scalar differential inequality
We get the estimate
It follows that
where is the maximal solution of (3.2). This shows that , and so is nonempty. If is a chain , then there is a uniquely defined mapping Y on that coincides with on . Clearly, and therefore Y is an upper bound of in . The proof of the theorem is completed if we show that . Suppose that it is not true, so that . Since is assumed to exist on , is bounded on . Since as uniformly in t on , the relation on implies that is bounded on . By assumption (C4), this shows that there is an such that
We have, for all with ,
where . Hence, Z is Lipschitzian on and consequently has a continuous extension on . By continuity of , we get
This implies that is a (i-i)-solution of problem (3.1) on and, clearly, , . Now, let , and consider the initial problem
The assumption of local existence implies that there exists a (i-i)-solution on , . Define
Therefore is a (i-i)-solution of problem (3.1) on , and, by repeating the arguments that were used to obtain (3.6), we get , . This contradicts the maximality of Z, and hence . The proof is complete. □
Remark 3.1 In Theorem 3.3, if (3.5) is replaced by
then for every such that , problem (3.1) has a (ii-i)-solution on , which satisfies the estimate
Remark 3.2 In Theorem 3.3, if (3.5) is replaced by
then for every such that , problem (3.1) has a (i-ii)-solution on , which satisfies the estimate
Remark 3.3 In Theorem 3.3, if (3.5) is replaced by
then for every such that , problem (3.1) has a (ii-ii)-solution on , which satisfies the estimate
Proof One can obtain these results easily by using the same methods as in the proof of Theorem 3.3. □
In next theorem, we present the continuous dependence of the solution on the right-hand side of the equation. First, let us again consider problem (3.1) of the form
and a problem with another initial value and another right-hand side, i.e.,
Theorem 3.4 Assume that are nontrivial interval-valued variables and , satisfy the conditions of Theorem 2.3. Let and be solutions of (3.10) and (3.11), respectively. Suppose further that there exist constants β, ε such that
for every . Then, for every solution of (3.10), the following estimation is true:
where , .
Proof Setting and , we obtain
On the other hand, we get
Combining (3.12) and (3.13), we have the estimate as follows:
□
It is easily seen that a little change of initial conditions or a little change of the right-hand side of the equation causes a little change of corresponding solutions.
Next, we shall present some examples being simple illustrations of the theory of second-order IDEs. Let us start the illustrations by considering the following second-order IDE:
where a, b are positive constants, , and is a continuous interval-valued function on , and . Our strategy of solving (3.14) is based on the choice of the derivative in the interval-valued differential equation. In order to solve (3.14), we have three steps: first we choose the type of derivative and change problem (3.14) to a system of ODE by using Theorem 2.1 and considering initial values. Second we solve the obtained ODE system. The final step is to find such a domain in which the solution and its derivatives have valid sets, i.e., we ensure that , and are valid sets.
By using Theorem 2.1, we obtain that four ODEs systems are possible for problem (3.14), as follows.
Case 1 and are (i)-differentiable
Case 2 is (i)-differentiable and is (ii)-differentiable
Case 3 is (ii)-differentiable and is (i)-differentiable
Case 4 and are (ii)-differentiable
Example 3.5 Let us consider the following interval-valued second-order differential equations:
Case 1: From (3.15), we get
By solving (3.20), we obtain and are (i)-differentiable. Hence, there is a solution in this case. This solution is shown in Figure 1.

Solution of Example 3.5 in Case 1.
Case 2: From (3.16), we have
By solving (3.21), we get is not (i)-differentiable, there is no solution in this case.
Case 3: From (3.17), we obtain
By solving (3.22), we get . Notice that, in this case, since is (ii)-differentiable and is (i)-differentiable, such a solution is acceptable. This solution is shown in Figure 2.

Solution of Example 3.5 in Case 3.
Case 4: From (3.18), we have
By solving (3.23), we have is not (ii)-differentiable on . Therefore, there is no solution in this case.
Example 3.6 Let us consider the following interval-valued second-order differential equations:
Case 1: From (3.15), we get
By solving (3.25), we obtain . Since is not (i)-differentiable, there is no solution in this case.
Case 2: From (3.16), we have
By solving (3.26), we get . Since, is not (ii)-differentiable, there is no solution in this case.
Case 3: From (3.17), we obtain
By solving (3.27), we get . Notice that, in this case, since is (ii)-differentiable and is (i)-differentiable, such a solution is acceptable. This solution is shown in Figure 3.

Solution of Example 3.6 in Case 3.
Case 4: From (3.18), we have
By solving (3.28), we have and are (ii)-differentiable. Therefore, the obtained solution is valid. This solution is shown in Figure 4.

Solution of Example 3.6 in Case 4.
4 A new method for solving interval-valued second-order differential equations
In [48] the author applied the modification of Laplace decomposition method (LDM) to solve nonlinear interval-valued Volterra integral equations. The modified LDM can be applied to derive the lower and upper solutions. In [46] Salahshour and Allahviranloo solved the second-order fuzzy differential equation under generalized H-differentiability by using fuzzy Laplace transforms. Now, in Section 3 we see that some second-order IDEs are solved under generalized H-differentiability. For the second-order IDEs, there exist at most four solutions, but all the obtained solutions may not be acceptable. It is an important result in the theory of IDEs of higher order. Notice that by applying the above approach (in Section 3), the original second-order IDEs are transformed to four ordinary differential systems. However, by applying Salahshour et al.’s [46] approach, each solution can be obtained directly. In this section, we propose a new algorithm based on the analysis of a crisp solution. We establish a synthesis of a crisp solution of an interval-valued initial value problem and the method proposed in Kaleva [5] and Akin [50].
Let us again consider the interval-valued second-order differential equations of the form
where A, B, C are interval-valued constants in and , are interval-valued functions. We define , , and , . Hence we obtain from (4.1)
Then we have
and
From two min and max problems, we notice that it is not an easy task to determine the result of the min and max problems, so we propose the following method.
Step 1: Problem (4.1) is considered as a crisp problem and solved. Here we chose the crisp problem
where is a real-valued solution of (4.3), , , , and .
Step 2: Next, we investigate the behavior of the crisp solution in (4.3) and the following four cases according to domains:
+ Let the domain where , be .
+ Let the domain where , be .
+ Let the domain where , be .
+ Let the domain where , be .
Step 3: After we obtain the four domains above, we set:
+ , and in domain .
+ , and in domain .
+ , and in domain .
+ , and in domain .
Step 4: Substitute the obtained domains in (4.1). Then we obtain that four ODEs systems are possible for problem (4.1), as follows:
Case 1: In domain
Case 2: In domain
Case 3: In domain
Case 4: In domain
Example 4.1 Consider the following interval-valued second-order differential equation with initial condition:
Now, before solving ISDE (4.8), let us solve a crisp problem corresponding to (4.8), to investigate the behavior of a solution. The crisp problem is
A solution for (4.9) is . The derivatives of a crisp solution are and . So, for , and for any t, . Therefore . Similarly, we have . Now, if we substitute the obtained domains in (4.8) for , we get the following:
Then the solution for (4.10) is as follows:
Next we must ensure that , and for all . But for any and for any . So (4.11) cannot be a solution for (4.8) according to the proposed method. We can see Figure 5. Similarly, we can do the same process for . If we substitute the obtained in (4.8) for , we get the following:
Then the solution for (4.12) is as follows:
After necessary computations, we see that , and for all . So, (4.13) is a solution for (4.8) according to the proposed method. In Figure 6, solution curves of (4.8) are given.

Solution of Example 4.1.

Solution of Example 4.1.
Example 4.2 Consider the following interval-valued second-order differential equation with initial condition:
Now, before solving ISDE (4.14), let us solve a crisp problem corresponding to (4.14), to investigate the behavior of a solution. The crisp problem is
A solution for (4.15) is . The derivatives of the crisp solution are and . So, for any t, and for any t, . Therefore . Now, if we substitute the obtained domain in (4.14) for , we get the following:
Then the solution for (4.16) is as follows:
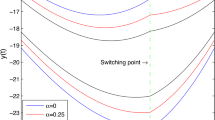
Similarly as in Example 4.1, we must ensure that , and . We obtain , and , . Therefore (4.17) is a solution for (4.14) for any t. We can see Figure 7 ( (blue), (red) and the crisp solution (black)).

Solution of Example 4.2.
5 Conclusions
In this paper, we have obtained a global existence result for a solution to interval-valued second-order differential equations. Also, we have proposed a new algorithm based on the analysis of a crisp solution. The proposed method in this paper may be useful if the coefficients, initial values and forcing terms are interval. If the crisp problem is not solvable explicitly, we cannot determine the mentioned domains precisely.
References
De Blasi FS, Iervolino F: Equazioni differenziali con soluzioni a valore compatto convesso. Boll. Unione Mat. Ital. 1969, 4(2):491-501.
Agarwal RP, O’Regan D, Lakshmikantham V: Viability theory and fuzzy differential equations. Fuzzy Sets Syst. 2005, 151(3):563-580. 10.1016/j.fss.2004.08.008
Agarwal RP, O’Regan D, Lakshmikantham V: A stacking theorem approach for fuzzy differential equations. Nonlinear Anal. TMA 2003, 55(3):299-312. 10.1016/S0362-546X(03)00241-4
Ngo VH, Nguyen DP: On maximal and minimal solutions for set-valued differential equations with feedback control. Abstr. Appl. Anal. 2012. 10.1155/2012/816218
Kaleva O: Fuzzy differential equations. Fuzzy Sets Syst. 1987, 24: 301-317. 10.1016/0165-0114(87)90029-7
Lakshmikantham V, Bhaskar TG, Devi JV: Theory of Set Differential Equations in Metric Spaces. Cambridge Scientific Publisher, Cambridge; 2006.
De Blasi FS, Lakshmikantham V, Bhaskar TG: An existence theorem for set differential inclusions in a semilinear metric space. Control Cybern. 2007, 36(3):571-582.
Song S, Wu C: Existence and uniqueness of solutions to Cauchy problem of fuzzy differential equations. Fuzzy Sets Syst. 2000, 110: 55-67. 10.1016/S0165-0114(97)00399-0
Bhaskar TG, Lakshmikantham V: Set differential equations and flow invariance. J. Appl. Anal. 2003, 82(2):357-368.
Agarwal RP, O’Regan D: Existence for set differential equations via multivalued operator equations. 5. Differential Equations and Applications 2007, 1-5.
Truong, VA, Ngo, VH, Nguyen, DP: A note on solutions of interval-valued Volterra integral equations. J. Integral Equ. Appl. (2013, in press)
Stefanini L, Bede B: Generalized Hukuhara differentiability of interval-valued functions and interval differential equations. Nonlinear Anal. TMA 2009, 71: 1311-1328. 10.1016/j.na.2008.12.005
Chalco-Cano Y, Rufián-Lizana A, Román-Flores H, Jiménez-Gamero MD: Calculus for interval-valued functions using generalized Hukuhara derivative and applications. Fuzzy Sets Syst. 2012. 10.1016/j.fss.2012.12.004
Malinowski MT: Interval Cauchy problem with a second type Hukuhara derivative. Inf. Sci. 2012, 213: 94-105. 10.1016/j.ins.2012.05.022
Malinowski MT: Interval differential equations with a second type Hukuhara derivative. Appl. Math. Lett. 2011, 24: 2118-2123. 10.1016/j.aml.2011.06.011
Truong VA, Ngo VH, Nguyen DP: Global existence of solutions for interval-valued integro-differential equations under generalized H-differentiability. Adv. Differ. Equ. 2013., 2013: Article ID 217 10.1186/1687-1847-2013-217
Moore R, Lodwick W: Interval analysis and fuzzy set theory. Fuzzy Sets Syst. 2003, 135(1):5-9. 10.1016/S0165-0114(02)00246-4
Georgiou DN, Nieto JJ, Rodríguez-López R: Initial value problems for higher-order fuzzy differential equations. Nonlinear Anal. 2005, 63: 587-600. 10.1016/j.na.2005.05.020
Bede B, Stefanini L: Generalized differentiability of fuzzy-valued functions. Fuzzy Sets Syst. 2012. 10.1016/j.fss.2012.10.003
Allahviranloo T, Khezerloo M, Sedaghatfar O, Salahshour S: Toward the existence and uniqueness of solutions of second-order fuzzy Volterra integro-differential equations with fuzzy kernel. Neural Comput. Appl. 2013, 22: S133-S141.
Salahshour S: N th-order fuzzy differential equations under generalized differentiability. J. Fuzzy Set Valued Anal. 2011., 2011: Article ID jfsva-00043
Rabiei F, Ismail F, Ahmadian A, Salahshour S: Numerical solution of second-order fuzzy differential equation using improved Runge-Kutta Nystrom method. Math. Probl. Eng. 2013., 2013: Article ID 803462
Allahviranloo T, Amirteimoori A, Khezerloo M, Khezerloo S: A new method for solving fuzzy Volterra integro-differential equations. Aust. J. Basic Appl. Sci. 2011, 5(4):154-164.
Alikhani R, Bahrami F, Jabbari A: Existence of global solutions to nonlinear fuzzy Volterra integro-differential equations. Nonlinear Anal. TMA 2012, 75(4):1810-1821. 10.1016/j.na.2011.09.021
Bede B, Gal SG: Generalizations of the differentiability of fuzzy-number-valued functions with applications to fuzzy differential equations. Fuzzy Sets Syst. 2005, 151: 581-599. 10.1016/j.fss.2004.08.001
Bede B, Rudas IG, Bencsik AL: First order linear fuzzy differential equations under generalized differentiability. Inf. Sci. 2007, 177: 1648-1662. 10.1016/j.ins.2006.08.021
Chalco-Cano Y, Román-Flores H: On new solutions of fuzzy differential equations. Chaos Solitons Fractals 2008, 38: 112-119. 10.1016/j.chaos.2006.10.043
Stefanini L, Sorini L, Guerra ML: Parametric representation of fuzzy numbers and application to fuzzy calculus. Fuzzy Sets Syst. 2006, 157: 2423-2455. 10.1016/j.fss.2006.02.002
Stefanini L: A generalization of Hukuhara difference. Series on Advances in Soft Computing 48. In Soft Methods for Handling Variability and Imprecision. Edited by: Dubois D, Lubiano MA, Prade H, Gil MA, Grzegorzewski P, Hryniewicz O. Springer, Berlin; 2008.
Nguyen DP, Ngo VH, Ho V: On comparisons of set solutions for fuzzy control integro-differential systems. J. Adv. Res. Appl. Math. 2012, 4(1):84-101. 10.5373/jaram
Mizukoshi MT, Barros LC, Chalco-Cano Y, Román-Flores H, Bassanezi RC: Fuzzy differential equations and the extension principle. Inf. Sci. 2007, 177: 3627-3635. 10.1016/j.ins.2007.02.039
Malinowski MT: Second type Hukuhara differentiable solutions to the delay set-valued differential equations. Appl. Math. Comput. 2012, 218(18):9427-9437. 10.1016/j.amc.2012.03.027
Zhang D, Feng W, Zhao Y, Qiu J: Global existence of solutions for fuzzy second-order differential equations under generalized H-differentiability. Comput. Math. Appl. 2010, 60: 1548-1556. 10.1016/j.camwa.2010.06.038
Ahmadian A, Suleiman M, Salahshour S, Baleanu D: A Jacobi operational matrix for solving a fuzzy linear fractional differential equation. Adv. Differ. Equ. 2013., 2013: Article ID 104
Allahviranloo T, Salahshour S, Homayoun-nejad M, Baleanu D: General solutions of fully fuzzy linear systems. Abstr. Appl. Anal. 2013., 2013: Article ID 593274
Ngo, VH, Nguyen, DP: Fuzzy functional integro-differential equations under generalized H-differentiability. J. Intell. Fuzzy Syst. (in press). doi:10.3233/IFS-130883. 10.3233/IFS-130883
Ho, V, Ngo, VH, Nguyen, DP: The local existence of solutions for random fuzzy integro-differential equations under generalized H-differentiability. J. Intell. Fuzzy Syst. (in press). doi:10.3233/IFS-130940. 10.3233/IFS-130940
Malinowski MT: Random fuzzy differential equations under generalized Lipschitz condition. Nonlinear Anal., Real World Appl. 2012, 13(2):860-881. 10.1016/j.nonrwa.2011.08.022
Malinowski MT: Existence theorems for solutions to random fuzzy differential equations. Nonlinear Anal., Theory Methods Appl. 2010, 73(6):1515-1532. 10.1016/j.na.2010.04.049
Malinowski MT: On random fuzzy differential equations. Fuzzy Sets Syst. 2009, 160(21):3152-3165. 10.1016/j.fss.2009.02.003
Allahviranloo T, Hajighasemi S, Khezerloo M, Khorasany M, Salahshour S: Existence and uniqueness of solutions of fuzzy Volterra integro-differential equations. CCIS 81. IPMU 2010, Part II 2010, 491-500.
Allahviranloo T, Salahshour S, Abbasbandy S: Solving fuzzy fractional differential equations by fuzzy Laplace transforms. Commun. Nonlinear Sci. Numer. Simul. 2012, 17(3):1372-1381. 10.1016/j.cnsns.2011.07.005
Allahviranloo T, Abbasbandy S, Sedaghatfar O, Darabi P: A new method for solving fuzzy integro-differential equation under generalized differentiability. Neural Comput. Appl. 2012, 21(1):191-196. 10.1007/s00521-011-0759-3
Allahviranloo T, Salahshour S: A new approach for solving first order fuzzy differential equation. Applications Communications in Computer and Information Science 81. Information Processing and Management of Uncertainty in Knowledge-Based Systems 2010, 522-531.
Allahviranloo T, Salahshour S: Euler method for solving hybrid fuzzy differential equation. Soft Comput. 2011, 15: 1247-1253. 10.1007/s00500-010-0659-y
Salahshour S, Allahviranloo T: Applications of fuzzy Laplace transforms. Soft Comput. 2013, 17: 145-158. 10.1007/s00500-012-0907-4
Salahshour S, Allahviranloo T: Application of fuzzy differential transform method for solving fuzzy Volterra integral equations. Appl. Math. Model. 2013, 37: 1016-1027. 10.1016/j.apm.2012.03.031
Salahshour S, Khan M: Exact solutions of nonlinear interval Volterra integral equations. Int. J. Ind. Math. 2012., 4: Article ID IJIM-00291
Salahshour S, Khezerloo M, Hajighasemi S, Khorasany M: Solving fuzzy integral equations of the second kind by fuzzy Laplace transform method. Int. J. Ind. Math. 2012, 4: 21-29.
Akin Ö, Khaniyev T, Oruc Ö, Türksen IB: An algorithm for the solution of second order fuzzy initial value problems. Expert Syst. Appl. 2013, 40: 953-957. 10.1016/j.eswa.2012.05.052
Acknowledgements
The authors would like to express their gratitude to the anonymous referees for their helpful comments and suggestions, which have greatly improved the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final version of the manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Ngo, V.H., Nguyen, D.P. Global existence of solutions for interval-valued second-order differential equations under generalized Hukuhara derivative. Adv Differ Equ 2013, 290 (2013). https://doi.org/10.1186/1687-1847-2013-290
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-290