
Abstract
In the present study, the first and second order of accuracy stable difference schemes for the numerical solution of the initial boundary value problem for the fractional parabolic equation with the Neumann boundary condition are presented. Almost coercive stability estimates for the solution of these difference schemes are obtained. The method is illustrated by numerical examples.
MSC:34K37, 35R11, 35B35, 39A14, 47B48.
Similar content being viewed by others

1 Introduction
Mathematical modeling of fluid mechanics (dynamics, elasticity) and other areas of physics lead to fractional partial differential equations. Numerical methods and theory of solutions of the problems for fractional differential equations have been studied extensively by many researchers (see, e.g., [1–31] and the references given therein).
The method of operators as a tool for investigation of the well-posedness of boundary value problems for parabolic partial differential equations is well known (see, e.g., [32–41]). In paper [42], the initial value problem
for the fractional differential equation in a Banach space E with the strongly positive operator A was investigated. This fractional differential equation corresponds to the Basset problem [43]. It represents a classical problem in fluid dynamics where the unsteady motion of a particle accelerates in a viscous fluid due to the gravity of force. Here is the standard Riemann-Liouville’s derivative of order .
The well-posedness of (1.1) in spaces of smooth functions was established. The coercive stability estimates for the solution of the 2m th order multidimensional fractional parabolic equation and the one-dimensional fractional parabolic equation with nonlocal boundary conditions in space variable were obtained.
In paper [44], the stable first order of accuracy difference scheme for the approximate solution of initial value problem (1.1)
was presented. Here (see, [45]),
Let be the linear space of mesh functions with values in the Banach space E. Next, on we introduce the Banach space with the norm
The well-posedness of (1.2) in difference analogues of spaces of smooth functions was established. Namely, we have the following theorems.
Theorem 1.1 Let A be a strongly positive operator in a Banach space E. Then, for the solution in of initial value problem (1.2) the stability inequality holds:
Theorem 1.2 Let A be a strongly positive operator in a Banach space E. Then, for the solution in of initial value problem (1.2) the almost coercive stability inequality is valid:
Here, and in future, positive constants, which can differ in time (hence: not a subject of precision) will be indicated with an M. On the other hand is used to focus on the fact that the constant depends only on .
Finally, the coercive stability and almost coercive stability estimates for the solution of difference schemes the first order of approximation in t for the 2m th order multidimensional fractional parabolic equation and the one-dimensional fractional parabolic equation with nonlocal boundary conditions in space variable were obtained.
In the present paper, applying the second order of approximation formula
for
and using the Crank-Nicholson difference scheme for parabolic equations, we present the second order of accuracy difference scheme
for the approximate solution of initial value problem (1.1). Here,
The well-posedness of (1.7) in is established. In applications, the initial boundary value problem for the fractional parabolic equation
is considered. Here, Ω is the open cube in the m-dimensional Euclidean space
with boundary S, , and () and (, ) are given smooth functions and , and is the normal vector to S.
The first and second order of accuracy difference schemes for the approximate solution of problem (1.8) are presented. The almost coercive stability estimates for the solution of these difference schemes are established. The theoretical statements for the solution of these difference schemes for one-dimensional fractional parabolic equations are supported by numerical examples.
2 The well-posedness of difference scheme
It is clear that the following representation formula
holds for the solution of problem (1.7). Here, and .
Theorem 2.1 Let A be a strongly positive operator in a Banach space E. Then, for the solution in of initial value problem (1.2) the following stability inequality holds:
Proof Using formulas (2.1) and (1.6), we get
Now, let us first estimate for any . Using formula (2.3) and the estimate
we get


Now we consider the case . Applying formula (2.3), the triangle inequality and estimates [46]
we get
Applying the difference analogue of the integral inequality and inequalities (2.5), (2.6) and (2.8), we get
Using the triangle inequality and equation (1.2), we get
Estimate (2.2) follows from estimates (2.9) and (2.10). Theorem 2.1 is proved. □
Theorem 2.2 Let A be a strongly positive operator in a Banach space E. Then, for the solution in of initial value problem (1.2) the almost coercive stability inequality is valid:
Proof Using formula (2.1), we get
The proof of estimate
for the solution of initial value problem (1.2) is based on formula (2.12) and estimate (2.2) and the following estimates [46]:
Using these estimates, the triangle inequality and equation (1.2), we get
Estimate (2.11) follows from estimates (2.13) and (2.14). Theorem 2.2 is proved. □
3 Applications
Now, we consider the applications of Theorems 2.1 and 2.2 to initial boundary value problem (1.8). The discretization of problem (1.8) is carried out in two steps. In the first step, let us define the grid space
We introduce the Banach space of the grid function defined on , equipped with the norm
To the differential operator generated by problem (1.8), we assign the difference operator by the formula
acting in the space of grid functions , satisfying the conditions for all . Here, is the first or second order of approximation of . It is known that (see, [47, 48]) is a strongly positive definite operator in . With the help of we arrive at the initial boundary value problem
for a finite system of ordinary fractional differential equations.
In the second step, applying the first order of approximation formula defined by (1.3) for
and using the first order of accuracy stable difference scheme for parabolic equations, we can present the first order of accuracy difference scheme
for the approximate solution of problem (1.8).
Moreover, applying the second order of approximation formula defined by (1.6) for
and using the Crank-Nicholson difference scheme for parabolic equations, we can present the second order of accuracy difference scheme
for the approximate solution of problem (1.8).
Theorem 3.1 Let τ and be sufficiently small numbers. Then the solutions of difference scheme (3.2) satisfy the following almost coercive stability estimates:
The proof of Theorem 3.1 is based on the abstract Theorem 1.2 and on the estimate
as well as on the positivity of the operator in [47, 48], along with the following theorem on the almost coercivity inequality for the solution of the elliptic difference equation in .
Theorem 3.2 [49]
Let be sufficiently small number. Then, for the solutions of the elliptic difference equation
the following almost coercivity inequality
is valid.
Theorem 3.3 Let τ and be sufficiently small numbers. Then the solutions of difference scheme (3.3) satisfy the following almost coercive stability estimates:
The proof of Theorem 3.3 is based on the abstract Theorem 2.2 and on estimate (3.4) and on the positivity of the operator in and on Theorem 3.2 on the almost coercivity inequality for the solution of the elliptic difference equation in .
Note that one has not been able to get a sharp estimate for the constants figuring in the almost coercive stability estimates of Theorems 3.1 and 3.3. Therefore, our interest in the present paper is studying the difference schemes (3.2) and (3.3) by numerical experiments. Applying these difference schemes, the numerical methods are proposed in the following section for solving the one-dimensional fractional parabolic partial differential equation. The method is illustrated by numerical experiments.
4 Numerical results
For the numerical result, the initial value problem
for the one-dimensional fractional parabolic partial differential equation is considered. The exact solution of problem (4.1) is .
4.1 First order of accuracy difference scheme
Applying difference scheme (3.2), we obtain
It can be rewritten in the matrix form
where
for and
So, we have the second order difference equation with respect to n matrix coefficients. This type system was developed by Samarskii and Nikolaev [50]. To solve this difference equation, we have applied a procedure for difference equation with respect to k matrix coefficients. Hence, we seek a solution of the matrix equation in the following form:
where () are square matrices and () are column matrices defined by
where , is the identity matrix and is the zero matrix.
4.2 Second order of accuracy difference scheme
Applying the formulas
and using difference scheme (3.3), we obtain the second order of accuracy difference scheme in t and in x
Here, is the fractional difference derivative defined by the formula (1.6). It can be rewritten in the matrix form
where
for and
For the solution of the matrix equation (4.2), we use the same algorithm as in the first order of accuracy difference scheme, where
for and
4.3 Error analysis
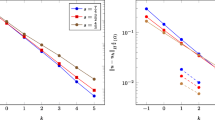
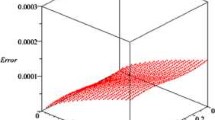
Finally, we give the results of the numerical analysis. The error is computed by the following formula
where represents the exact solution and represents the numerical solutions of these difference schemes at .
The numerical solutions are recorded for different values of N and M. Table 1 is constructed for , respectively.
Thus, the results show that, by using the Crank-Nicholson difference scheme increases faster then the first order of accuracy difference scheme.
5 Conclusion
In the present study, the second order of accuracy difference scheme for the approximate solution of initial value problem (1.1) is presented. A theorem on almost coercivity of this difference scheme in maximum norm is established. Almost coercive stability estimates for the solution of the first and second order of accuracy stable difference schemes for the numerical solution of the initial boundary value problem for the fractional parabolic equation with the Neumann boundary condition are obtained. Of course, stability estimates permits us to obtain the convergence of difference schemes for the numerical solution of the initial boundary value problem for the fractional parabolic equation with the Neumann boundary condition. Moreover, the Banach fixed-point theorem and method of the present paper enables us to obtain the estimate of convergence of difference schemes of the first and second order of accuracy for approximate solutions of the initial-boundary value problem:
for semilinear fractional parabolic partial differential equations with smooth and .
References
Podlubny I Mathematics in Science and Engineering 198. In Fractional Differential Equations. Academic Press, San Diego; 1999.
Samko SG, Kilbas AA, Marichev OI: Fractional Integrals and Derivatives. Gordon & Breach, Yverdon; 1993.
Kilbas AA, Sristava HM, Trujillo JJ North-Holland Mathematics Studies. In Theory and Applications of Fractional Differential Equations. North-Holland, Amsterdam; 2006.
Diethelm K Lecture Notes in Mathematics 2004. In The Analysis of Fractional Differential Equations. Springer, Berlin; 2010.
Diethelm K, Ford NJ: Multi-order fractional differential equations and their numerical solution. Appl. Math. Comput. 2004, 154(3):621–640. 10.1016/S0096-3003(03)00739-2
El-Mesiry AEM, El-Sayed AMA, El-Saka HAA: Numerical methods for multi-term fractional (arbitrary) orders differential equations. Appl. Math. Comput. 2005, 160(3):683–699. 10.1016/j.amc.2003.11.026
Pedas A, Tamme E: On the convergence of spline collocation methods for solving fractional differential equations. J. Comput. Appl. Math. 2011, 235(12):3502–3514. 10.1016/j.cam.2010.10.054
El-Sayed AMA, El-Mesiry AEM, El-Saka HAA: Numerical solution for multi-term fractional (arbitrary) orders differential equations. Comput. Appl. Math. 2004, 23(1):33–54.
Gorenflo R, Mainardi F: Fractional calculus: integral and differential equations of fractional order. 378. In Fractals and Fractional Calculus in Continuum Mechanics. Edited by: Carpinteri A, Mainardi F. Springer, Vienna; 1997:223–276.
Yakar A, Koksal ME: Existence results for solutions of nonlinear fractional differential equations. Abstr. Appl. Anal. 2012. doi:10.1155/2012/267108
De la Sen M: Positivity and stability of the solutions of Caputo fractional linear time-invariant systems of any order with internal point delays. Abstr. Appl. Anal. 2011. doi:10.1155/2011/161246
Chengjun Y:Two positive solutions for -type semipositone integral boundary value problems for coupled systems of nonlinear fractional differential equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17(2):930–942. 10.1016/j.cnsns.2011.06.008
De la Sen M, Agarwal RP, Ibeas A, Quesada SA: On the existence of equilibrium points, boundedness, oscillating behavior and positivity of a SVEIRS epidemic model under constant and impulsive vaccination. Adv. Differ. Equ. 2011. doi:10.1155/2011/748608
De la Sen M: About robust stability of Caputo linear fractional dynamic systems with time delays through fixed point theory. Fixed Point Theory Appl. 2011. doi:10.1155/2011/867932
Chengjun Y:Multiple positive solutions for semipositone -type boundary value problems of nonlinear fractional differential equations. Anal. Appl. 2011, 9(1):97–112. 10.1142/S0219530511001753
Chengjun Y:Multiple positive solutions for -type semipositone conjugate boundary value problems for coupled systems of nonlinear fractional differential equations. Electron. J. Qual. Theory Differ. Equ. 2011., 2011: Article ID 13
Agarwal RP, Belmekki M, Benchohra M: A survey on semilinear differential equations and inclusions involving Riemann-Liouville fractional derivative. Adv. Differ. Equ. 2009. doi:10.1155/2009/981728
Agarwal RP, de Andrade B, Cuevas C: On type of periodicity and ergodicity to a class of fractional order differential equations. Adv. Differ. Equ. 2010. doi:10.1155/2010/179750
Agarwal RP, de Andrade B, Cuevas C: Weighted pseudo-almost periodic solutions of a class of semilinear fractional differential equations. Nonlinear Anal., Real World Appl. 2010, 11: 3532–3554. 10.1016/j.nonrwa.2010.01.002
Berdyshev AS, Cabada A, Karimov ET: On a non-local boundary problem for a parabolic-hyperbolic equation involving a Riemann-Liouville fractional differential operator. Nonlinear Anal. 2011, 75(6):3268–3273.
Ashyralyev A, Amanov D: Initial-boundary value problem for fractional partial differential equations of higher order. Abstr. Appl. Anal. 2012. doi:10.1155/2012/973102
Ashyralyev A, Sharifov YA: Existence and uniqueness of solutions of the system of nonlinear fractional differential equations with nonlocal and integral boundary conditions. Abstr. Appl. Anal. 2012. doi:10.1155/2012/594802
Kirane M, Laskri Y: Nonexistence of global solutions to a hyperbolic equation with a space-time fractional damping. Appl. Math. Comput. 2005, 167(2):1304–1310. 10.1016/j.amc.2004.08.038
Kirane M, Laskri Y, Tatar NE: Critical exponents of Fujita type for certain evolution equations and systems with spatio-temporal fractional derivatives. J. Math. Anal. Appl. 2005, 312(2):488–501. 10.1016/j.jmaa.2005.03.054
Kirane M, Malik SA: The profile of blowing-up solutions to a nonlinear system of fractional differential equations. Nonlinear Anal., Theory Methods Appl. 2010, 73(12):3723–3736. 10.1016/j.na.2010.06.088
Araya D, Lizama C: Almost automorphic mild solutions to fractional differential equations. Nonlinear Anal. 2008, 69(11):3692–3705. 10.1016/j.na.2007.10.004
N’Guerekata GM: A Cauchy problem for some fractional abstract differential equation with nonlocal conditions. Nonlinear Anal. 2009, 70: 1873–1876. 10.1016/j.na.2008.02.087
Mophou GM, N’Guerekata GM: Mild solutions for semilinear fractional differential equations. Electron. J. Differ. Equ. 2009., 2009: Article ID 21
Mophou GM, N’Guerekata GM: Existence of mild solution for some fractional differential equations with nonlocal conditions. Semigroup Forum 2009, 79(2):315–322. 10.1007/s00233-008-9117-x
Lakshmikantham V: Theory of fractional differential equations. Nonlinear Anal. 2008, 69(10):3337–3343. 10.1016/j.na.2007.09.025
Lakshmikantham V, Devi JV: Theory of fractional differential equations in Banach spaces. Eur. J. Pure Appl. Math. 2008, 1: 38–45.
Ashyralyev A, Dal F, Pınar Z: A note on the fractional hyperbolic differential and difference equations. Appl. Math. Comput. 2011, 217(9):4654–4664. 10.1016/j.amc.2010.11.017
Ashyralyev A, Hicdurmaz B: A note on the fractional Schrödinger differential equations. Kybernetes 2011, 40(5/6):736–750. 10.1108/03684921111142287
Cakir Z: Stability of difference schemes for fractional parabolic PDE with the Dirichlet-Neumann conditions. Abstr. Appl. Anal. 2012. doi:10.1155/2012/463746
Ashyralyev A, Cakir Z: On the numerical solution of fractional parabolic partial differential equations with the Dirichlet condition. Discrete Dyn. Nat. Soc. 2012. doi:10.1155/2012/696179
Clement P, Delabrire SG: On the regularity of abstract Cauchy problems and boundary value problems. Atti Accad. Naz. Lincei Cl. Sci. Fis. Mat. Natur. Rend. Lincei Mat. Appl. 1999, 9(4):245–266.
Agarwal RP, Bohner M, Shakhmurov VB: Maximal regular boundary value problems in Banach-valued weighted space. Bound. Value Probl. 2005, 1: 9–42.
Lunardi A Operator Theory: Advances and Applications. In Analytic Semigroups and Optimal Regularity in Parabolic Problems. Birkhäuser, Basel; 1995.
Ashyralyev A, Hanalyev A, Sobolevskii PE: Coercive solvability of nonlocal boundary value problem for parabolic equations. Abstr. Appl. Anal. 2001, 6(1):53–61. 10.1155/S1085337501000495
Ashyralyev A, Hanalyev A: Coercive solvability of parabolic differential equations with dependent operators. TWMS J. Appl. Eng. Math. 2012, 2(1):75–93.
Ashyralyev A, Sobolevskii PE: Well-Posedness of Parabolic Difference Equations. Birkhäuser, Basel; 1994.
Ashyralyev A: Well-posedness of the Basset problem in spaces of smooth functions. Appl. Math. Lett. 2011, 14(7):1176–1180.
Basset AB: On the descent of a sphere in a viscous liquid. Q. J. Math. 1910, 42: 369–381.
Ashyralyev A: Well-posedness of parabolic differential and difference equations with the fractional differential operator. Malays. J. Math. Sci. 2012, 6(S):73–89.
Ashyralyev A: A note on fractional derivatives and fractional powers of operators. J. Math. Anal. Appl. 2009, 357(1):232–236. 10.1016/j.jmaa.2009.04.012
Ashyralyev A, Sobolevskii PE: Theory of the interpolation of the linear operators and the stability of the difference schemes. Dokl. Akad. Nauk SSSR 1984, 275(6):1289–1291.
Alibekov HA, Sobolevskii PE: Stability and convergence of difference schemes of a high order of approximation for parabolic partial differential equations. Ukr. Mat. Zh. 1980, 32(3):291–300.
Alibekov HA, Sobolevskii PE: The stability of difference schemes for parabolic equations. Dokl. Akad. Nauk SSSR 1977, 232(4):737–740.
Sobolevskii PE: The coercive solvability of difference equations. Dokl. Akad. Nauk SSSR 1971, 201(5):1063–1066.
Samarskii AA, Nikolaev ES 2. In Numerical Methods for Grid Equations: Iterative Methods. Birkhäuser, Basel; 1989.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Ashyralyev, A., Cakir, Z. FDM for fractional parabolic equations with the Neumann condition. Adv Differ Equ 2013, 120 (2013). https://doi.org/10.1186/1687-1847-2013-120
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-120