
Abstract
In this article, a class of impulsive non-autonomous delay difference equations with continuous variables is considered. By establishing a delay difference inequality with impulsive initial conditions and using the decomposition approach, we obtain the attracting and invariant sets of the equations.
Similar content being viewed by others

Introduction
Recently, there has been an increasing interest in the study of the asymptotic behavior and other behaviors of the difference equations with continuous variables in which the unknown function is a function of a continuous variable. In particular, delay effects on the asymptotic behavior and other behaviors of this kind of equations have widely been studied in the literature [1–7].
However, besides delay effects, impulsive effects likewise exist in a wide variety of evolutionary process, in which states are changed abruptly at certain moments of time. Recently, impulsive delay difference equations have extensively been studied by many authors. For example, the reader is referred to [8–13]. Unfortunately, impulsive delay difference equations with continuous variables are not well developed due to some theoretical and technical difficulties. Some sufficient conditions for the existence of the invariant and attracting sets of impulsive delay difference equations with continuous variables are obtained in [14, 15]. To the best of the authors' knowledge, there are no results on the corresponding problems for impulsive non-autonomous delay difference equations with continuous variables. With motivation from the above discussions, this article is devoted to the discussion of this problem. By establishing a delay difference inequality with impulsive initial conditions and using the decomposition approach, we obtain the attracting and invariant sets of the equations.
Preliminaries
Let be the space of n-dimensional (non-negative) real column vectors, be the set of m×n (non-negative) real matrices, E be the n-dimensional unit matrix, and |·| be the Euclidean norm of ℝn. For A, B ∈ ℝm×nor A, B ∈ ℝn, A ≥ B(A ≤ B, A > B, A < B) means that each pair of corresponding elements of A and B satisfies the inequality " ≥ (≤, >, <)". Especially, A is called a non-negative matrix if A ≥ 0, and z is called a positive vector if z > 0. and ϱ(A) denotes the spectral radius of A.
C[X, Y ] denotes the space of continuous mappings from the topological space X to the topological space Y. Especially, let C ≜ C[[-τ2, 0], ℝn], where τ2 > 0.
where is an interval, and ψ(s+) and ψ(s-) denote the right- and left-hand limits of the the function ψ(s), respectively. Especially, let PC ≜ PC[[-τ2, 0], ℝn].
In this article, we consider the following impulsive non-autonomous delay difference equation with continuous variable
where a i (t) = a i h(t) and a ij (t) = a ij h(t), a i and a ij are real constants, h(t) ≤ 1 is a positive integral function and satisfies and . τ1 and τ2 are positive real numbers such that τ1 < τ2. t k (k = 1, 2,...) is an impulsive sequence such that t1 < t2 <..., limk→∞t k = ∞. f j and J ik : ℝ →ℝ are real-valued functions. Moreover, we assume that f j (0) = 0 and J ik (0) = 0, then system (1) admits an equilibrium solution x(t) ≡ 0.
By the solution of (1), we mean a piecewise continuous real-valued function x i (t) defined on the interval [t0 - τ2, ∞) which satisfies (1) for all t ≥ t0.
By the method of steps, one can easily see that, for any given initial function ϕ i ∈ PC[[-τ2, 0], ℝ], there exists a unique solution x i (t), , of (1).
For convenience, we rewrite the system (1) as the following vector form
where x(t) = (x1(t),..., x n (t))T , A0 = diag{a1,..., a n }, A = (a ij )n×n, f(x) = (f1(x1),..., f n (x n ))T, J k (x) = (J1k(x1),..., J nk (x n ))T , and ϕ = (ϕ1,..., ϕ n )T ∈ PC.
Definition 2.1. The set S ⊂ PC is called a positive invariant set of (2), if for any initial value ϕ ∈ S, the solution x t (t0, ϕ) ∈ S, t ≥ t0, where x t (t0, ϕ) = x(t + s, t0, ϕ) ∈ PC, s ∈ [-τ2, 0].
Definition 2.2. The set S ⊂ PC is called a global attracting set of (2), if for any initial value ϕ ∈ PC, the solution x(t, t0, ϕ) satisfies
where dist(ϕ, S) = infψ∈Sdist(ϕ, ψ), dist(ϕ, ψ) = supθ∈[-τ2,0] |ϕ(θ) - ψ(θ)|, for ψ ∈ PC.
Definition 2.3. System (2) is said to be globally exponentially stable if for any solution x(t, t0, ϕ), there exist constants λ0 > 0 and κ0 ≥ 0 such that,
where .
Following [16], we split the matrices A0, A into two parts, respectively,
with , , , .
Set y = -x, g(u) = -f(-u). Then, by a similar argument with [15], we can get the following equations from the first equation of (2)
where
Set I k (u) = -J k (-u); in view of the impulsive part of (2), we have
where ω k (v) = (J k (x)T , I k (y(t)T)T.
Lemma 2.1. [17, 18]If and ϱ(M) < 1, then (E - M) -1 ≥ 0.
Lemma 2.2. [18]Suppose that and ϱ(M) < 1, then there exists a positive vector z such that (E - M) z > 0.
For and ϱ(M) < 1, we denote
In order to discuss the asymptotic behavior of (2), and for the brevity of later discussion, we list all our conditions as follows.
(A1) For any x, y ∈ ℝn , there exists a non-negative diagonal matrix and vector μ = (μ1,..., μ n )T ≥ 0 such that
(A2) For any x, y ∈ ℝn, there exist nonnegative matrices R k such that
(A3) Let , where .
(A4) There exists a constant γ such that
where the scalar λ satisfies 0 < λ and is determined by the following inequality
where , and
(A5) Let
where σ k ≥ 1 satisfy
where Λ = (μT, μT)T.
Main results
In this section, we will give the main results of this article. The proofs of these results are placed in the following section for the sake of brevity.
Theorem 3.1. Let P = (p ij )n×n, , , and u(t) ∈ ℝn be a solution of the following delay difference inequality with the initial condition u(t0 + θ) = ϕ(θ), θ ∈ [-τ2, 0] ϕ ∈ PC,
where τ2 > τ1, h(t) ≤ 1 is a positive integral function and and .
If ϱ(P + W) < 1, then there exists a positive vector z = (z1, z2,..., z n )T such that
provided that the initial condition satisfies
where the positive number λ > 0 is determined by the following inequality
where . Clearly, H1 < H2 < ∞.
Theorem 3.2. If (A1)-(A5) hold, then is a global attracting set of (2), where and .
Theorem 3.3. If (A1)-(A3) with R k ≤ E hold, then is a positive invariant set and also a global attracting set of (2), where and
For the case I = 0, we easily observe x(t) ≡ 0 is a solution of (2) from (A1) and (A2). In the following, we give the attractivity of the zero solution and the proof is similar to that of Theorem 3.2.
Corollary 3.1. If (A1)-(A4) hold with I = 0, then the zero solution of (2) is globally exponentially stable.
Proofs of main results
Proof of Theorem 3.1. Since P, and ϱ(P + W) < 1, by Lemma 2.2, there exists a positive vector z ∈ Ω ϱ (P + W) such that (E - P - W)) z > 0. By continuity, we know that (15) has at least one positive solution λ, i.e.,
Set
where N = (E - P - W)-1I; substituting (17) into (12), we have
Then, by (18) and h(t) ≤ 1, we obtain
By (14) and (17), we get that
Next, we will prove for any t ≥ t0,
To prove (21), we first prove that for any positive constant ε,
If (22) is not true, then there must be a t* > t0 and some integer r such that
By using (16) and (19), we obtain that
which is a contradiction. Hence, (22) holds for all numbers ε > 0; it follows immediately that (21) is always satisfied, which can easily be led to (13). This completes the proof. □
Proof of Theorem 3.2. Since , by Lemma 2.2, there exists a positive vector such that . Using continuity, we obtain that inequality (8) has at least one positive solution λ.
From (5) and Condition (6), we can claim that for any v ∈ℝ2n,
and
where Λ = (μT, μT)T.
So by using (3) and (4) and taking into account (24) and (25), we get
and
respectively.
Noting and , , then, by Lemma 2.1, we can get and .
For the initial conditions: x(t0 + θ) = ϕ(θ), θ ∈ [-τ2, 0], where ϕ ∈ PC, we have
where
Then, all the conditions of Theorem 3.1 are satisfied by (26), (28), and Condition (A3), we derive that
Suppose for all ι = 1,..., k, the inequalities
hold, where γ0 = σ0 = 1. Then, from (9), (11), (30), and (A2), the impulsive part of (2) satisfies that
This, together with (30) and γ k , σ k ≥ 1, leads to
On the other hand,
It follows from (32)-(33) and Theorem 3.1 that
By the mathematical induction, we can conclude that
From (7) and (10),
we can use (35) to conclude that
This implies that the conclusion of the theorem holds and the proof is complete. □
Proof of Theorem 3.3. Similarly, the inequality (8) holds by (A3). For the initial conditions: x(t0 + s) = ϕ(s), s ∈ [-τ2, 0], where ϕ ∈S, we have
By (36) and Theorem 3.1 with κ = 0, we have
Then, from (27) and R k ≤ E,
Thus,
Using Theorem 3.1 again, we obtain
By introduction, we have
Therefore, is a positive invariant set. Since ℛ k ≤ E, a direct calculation shows that γ k = σ k = 1 and σ = 0 in Theorem 3.2. It follows from Theorem 3.2 that the set S is also a global attracting set of (2). The proof is complete. □
Illustrative example
The following illustrative example will demonstrate the effectiveness of our results.
Example 4.1 Consider the following impulsive delay difference equation:
with
where α ik and β ik are non-negative constants, and the impulsive sequence t k (k = 1, 2,...) satisfy: t1 < t2 < · · · , limk→∞t k = ∞.
The parameters of (A1)-(A3) are as follows:
and .
It is easy to prove that and
Let and λ = 0.05 which satisfies the inequality
where, , .
Let γ k = 3 max{α1k+ β1k, α2k+ β2k}, then γ k satisfy γ k z ≥ R k z, k = 1, 2,....
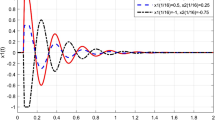
Case 4.1. Let , and t k - tk-1= 2k, then and
By simple computation, we know that , , , .
Clearly, all conditions of Theorem 3.2 are satisfied. So is a global attracting set of (42).
Case 4.2. Let and β1k= β2k= 0, then . Therefore, by Theorem 3.3, S = {ϕ ∈ PC| - (1.2773, 0.8739)T ≤ ϕ ≤ (1.2773, 0.8739)T is a positive invariant set and also a global attracting set of (42).
Case 4.3. If μ = 0 and let and , then γ k = e0.04k≥ 1 and
Clearly, all conditions of Corollary 3.1 are satisfied. Therefore, by Corollary 3.1, the zero solution of (42) is globally exponentially stable.
References
Deng JQ: A note on oscillation of second-order nonlinear difference equation with continuous variable. J Math Anal Appl 2003, 280: 188–194. 10.1016/S0022-247X(03)00068-4
Deng JQ: Existence for continuous nonoscillatory solutions of second-order nonlinear difference equations with continuous variable. Math Comput Model 2007, 46: 670–679. 10.1016/j.mcm.2006.11.028
Deng JQ, Xu ZJ: Bounded continuous nonoscillatory solutions of second-order nonlinear difference equations with continuous variable. J Math Anal Appl 2007, 333: 1203–1215. 10.1016/j.jmaa.2006.12.038
Ladas G: Recent developments in the oscillation of delay difference equations. Differential Equations. Lect Notes Prue Appl Math 1991, 127: 321–332.
Philos CHG, Purnaras IK: An asymptotic result for some delay difference equations with continuous variable. Adv Diff Equ 2004, 1: 1–10.
Philos CHG, Purnaras IK: On non-autonomous linear difference equations with continuous variable. J Diff Equ Appl 2006, 12: 651–668. 10.1080/10236190600652360
Philos CHG, Purnaras IK: On the behavior of the solutions to autonomous linear difference equations with continuous variable. Arch Math (BRNO) 2007, 43: 133–155.
Peng MS: Oscillation theorems of second-order nonlinear neutral delay difference equations with impulses. Comput Math Appl 2002, 44: 741–748. 10.1016/S0898-1221(02)00187-6
Peng MS: Oscillation criteria for second-order impulsive delay difference equations. Appl Math Comput 2003, 146: 227–235. 10.1016/S0096-3003(02)00539-8
Zhang QQ: On a linear delay difference equation with impulses. Ann Diff Equ 2002, 18: 197–204.
Zhang H, Chen LS: Oscillation criteria for a class of second-order impulsive delay difference equations. Adv Complex Syst 2006, 9: 69–76. 10.1142/S0219525906000677
Zhang Y, Sun JT, Feng G: Impulsive control of discrete systems with time delay. IEEE Trans Autom Control 2009, 54: 830–834.
Zhu W, Xu DY, Yang ZC: Global exponential stability of impulsive delay difference equation. Appl Math Comput 2006, 181: 65–72. 10.1016/j.amc.2006.01.015
Ma ZX, Xu LG: Asymptotic behavior of impulsive infinite delay difference equations with continuous variables. Adv Diff Equ 2009, 1: 1–13.
Zhu W: Invariant and attracting sets of impulsive delay difference equations with continuous variables. Comput Math Appl 2008, 55: 2732–2739. 10.1016/j.camwa.2007.10.020
Chu TG, Zhang ZD, Wang ZL: A decomposition approach to analysis of competitive-cooperative neural networks with delay. Phys Lett A 2003, 312: 339–347. 10.1016/S0375-9601(03)00692-3
Horn RA, Johnson CR: Matrix Analysis. Cambridge University Press, London; 1990.
Lasalle JP: The Stability of Dynamical System. SIAM, Philadelphia; 1976.
Acknowledgements
The authors would like to thank several anonymous reviewers for their constructive suggestions and helpful comments. The study was supported by the National Natural Science Foundation of China under Grants 10971147 and 11101367.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors' contributions
DH provided the main idea of this article and carried out the main proof of the theorems. QM carried out the proof of Theorem 3.1. All authors read and approve the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
He, D., Ma, Q. Asymptotic behavior of impulsive non-autonomous delay difference equations with continuous variables. Adv Differ Equ 2012, 118 (2012). https://doi.org/10.1186/1687-1847-2012-118
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2012-118