
Abstract
In this paper, we introduce the new notion of almost ψ-Geraghty contractive mappings and investigate the existence of a best proximity point for such mappings in complete metric spaces via the weak P-property. We provide an example to validate our best proximity point theorem. The obtained results extend, generalize, and complement some known fixed and best proximity point results from the literature.
MSC:47H10, 54H25, 46J10, 46J15.
Similar content being viewed by others

1 Introduction and preliminaries
Non-self-mappings are among the intriguing research directions in fixed point theory. This is evident from the increase of the number of publications related with such maps. A great deal of articles on the subject investigate the non-self-contraction mappings on metric spaces. Let be a metric space and A and B be nonempty subsets of X. A mapping is said to be a k-contraction if there exists such that for any . It is clear that a k-contraction coincides with the celebrated Banach fixed point theorem (Banach contraction principle) [1] if one takes where the induced metric space is complete.
In nonlinear analysis, the theory of fixed points is an essential instrument to solve the equation for a self-mapping T defined on a subset of an abstract space such as a metric space, a normed linear space or a topological vector space. Following the Banach contraction principle, most of the fixed point results have been proved for a self-mapping defined on an abstract space. It is quite natural to investigate the existence and uniqueness of a non-self-mapping which does not possess a fixed point. If a non-self-mapping has no fixed point, then the answer of the following question makes sense: Is there a point such that the distance between x and Tx is closest in some sense? Roughly speaking, best proximity theory investigates the existence and uniqueness of such a closest point x. We refer the reader to [2–9] and [10–32] for further discussion of best proximity.
Definition 1.1 Let be a metric space and . We say that is a best proximity point of the non-self-mapping if the following equality holds:
where .
It is clear that the notion of a fixed point coincided with the notion of a best proximity point when the underlying mapping is a self-mapping.
Let be a metric space. Suppose that A and B are nonempty subsets of a metric space . We define the following sets:
In [17], the authors presented sufficient conditions for the sets and to be nonempty.
In 1973 Geraghty [33] introduced the class S of functions satisfying the following condition:
The author defined contraction mappings via functions from this class and proved the following result.
Theorem 1.1 (Geraghty [33])
Let be a complete metric space and be an operator. If T satisfies the following inequality:
where , then T has a unique fixed point.
Recently, Caballero et al. [6] introduced the following contraction.
Definition 1.2 ([6])
Let A, B be two nonempty subsets of a metric space . A mapping is said to be a Geraghty-contraction if there exists such that
Based on Definition 1.2, the authors [6] obtained the following result.
Theorem 1.2 (See [6])
Let be a pair of nonempty closet subsets of a complete metric space such that is nonempty. Let be a continuous, Geraghty-contraction satisfying . Suppose that the pair has the P-property, then there exists a unique in A such that .
The P-property mentioned in the theorem above has been introduced in [29].
Definition 1.3 Let be a pair of nonempty subsets of a metric space with . Then the pair is said to have the P-property if and only if for any and ,
It is easily seen that for any nonempty subset A of , the pair has the P-property. In [29], the author proved that any pair of nonempty closed convex subsets of a real Hilbert space H satisfies the P-property.
Recently, Zhang et al. [34] defined the following notion, which is weaker than the P-property.
Definition 1.4 Let be a pair of nonempty subsets of a metric space with . Then the pair is said to have the weak P-property if and only if for any and ,
Let Ψ denote the class of functions satisfying the following conditions:
-
(a)
ψ is nondecreasing;
-
(b)
ψ is subadditive, that is, ;
-
(c)
ψ is continuous;
-
(d)
.
The notion of ψ-Geraghty contraction has been introduced very recently in [11], as an extension of Definition 1.2.
Definition 1.5 Let A, B be two nonempty subsets of a metric space . A mapping is said to be a ψ-Geraghty contraction if there exist and such that
Remark 1.1 Notice that since , we have
In [11], the author also proved the following best proximity point theorem.
Theorem 1.3 (See [11])
Let be a pair of nonempty closed subsets of a complete metric space such that is nonempty. Let be a ψ-Geraghty contraction satisfying . Suppose that the pair has the P-property. Then there exists a unique in A such that .
2 Main results
Our main results are based on the following definition which is a generalization of Definition 1.5.
Definition 2.1 Let A, B be two nonempty subsets of a metric space . A mapping is said to be a generalized almost ψ-Geraghty contraction if there exist and such that
for all where ,
Now, we state and prove our main theorem about existence and uniqueness of a best proximity point for a non-self-mapping satisfying a generalized almost ψ-Geraghty contraction.
Theorem 2.1 Let be a pair of nonempty closed subsets of a complete metric space such that is nonempty. Let be a generalized almost ψ-Geraghty contraction satisfying . Assume that the pair has the weak P-property. Then T has a unique best proximity point in A.
Proof Since the subset is not empty, we can take in . Taking into account that , we can find such that . Further, since , it follows that there is an element in such that . Recursively, we obtain a sequence in satisfying
Since the pair has the weak P-property, we deduce
Due to the triangle inequality together with the equality (11) we have
Analogously, combining the equalities (11) and (12) with the triangle inequality we obtain
Consequently, we have
Also note that
If there exists such that , then the proof is completed. Indeed,
and consequently, . Therefore, we conclude that
For the rest of the proof, we suppose that for all . In view of the fact that T is a generalized almost ψ-Geraghty contraction, we have
Taking into account the inequalities (14) and (18), we deduce that
If for some n, , then we get
which is a contradiction. Therefore, we must have
for all . Regarding the inequality (18), we see that
holds for all . Since ψ is nondecreasing, then for all n. Consequently, the sequence is decreasing and is bounded below and hence exists. Assume that . Rewrite (20) as
for each . Taking the limit of both sides as , we find
On the other hand, since , we conclude , that is,
Since holds for all and satisfies the weak P-property, then for all , we can write
From (13), we deduce
By using , we get
On the other hand,
Due to the fact that , we obtain
We shall show next that is a Cauchy sequence. Assume on the contrary that
Employing the triangular inequality and (22), we get
Combining (10) and (27), and regarding the properties of ψ, we obtain
From (23), (25), (28), and by using , we have
So by (26), we get
that is, . Therefore, . This implies that , which is a contradiction. Therefore, is a Cauchy sequence.
Since and A is a closed subset of the complete metric space , we can find such that as . We shall show that . If , then , and , i.e., is a best proximity point of T. Hence, we assume that . Suppose on the contrary that is not a best proximity point of T, that is, . First note that
Taking the limit as in the above inequality, we obtain
Since ψ is nondecreasing and continuous, then
Also, letting in (13) results in
that is, . Then we get
and therefore
Further,
which implies
Therefore, combining (10), (29), (30), and (31) we deduce
Now, since , and making use of (32), we get
that is,
which implies
and so , which is a contradiction. Therefore, , that is, . In other words, is a best proximity point of T. This completes the proof of the existence of a best proximity point.
We shall show next the uniqueness of the best proximity point of T. Suppose that and are two best proximity points of T, such that . This implies that
where . Due to the weak P-property of the pair , we have
Observe that in this case
Also, note that
Using the fact that T is a generalized almost ψ-Geraghty contraction, we derive
If , due to the fact that , the inequality above becomes
which implies and contradicts the assumption . Else, if , we deduce
which is not possible, since ψ is nondecreasing. Therefore, we must have . This completes the proof. □
To illustrate our result given in Theorem 2.1, we present the following example, which shows that Theorem 2.1 is a proper generalization of Theorem 1.2.
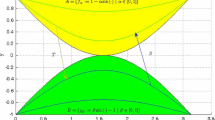
Example 2.1 Consider the space with Euclidean metric. Take the sets
Obviously, . Let be defined by . Notice that , and . Also, it is clear that the pair has the weak P-property.
Consider
and (with ) for all . Note that and . For all , we have
We shall show that T is a generalized almost ψ-Geraghty contraction. Without loss of generality, consider the case where . Then we have and .
In this case, we see that
Therefore
On the other hand, we know that for all with . Hence,
and from (37) we deduce
Thus, all hypotheses of Theorem 2.1 are satisfied, and is the unique best proximity point of the map T.
On the other hand, T is not a Geraghty contraction. Indeed, taking and , we get
Then Theorem 1.2 (the main result of Caballero et al. [6]) is not applicable.
Similarly, we cannot apply Theorem 1.3 because T is not a ψ-Geraghty contraction. Let , and with . Then T does not satisfy (8).
If in Theorem 2.1 we take for all , then we deduce the following corollary.
Corollary 2.1 Let be a pair of nonempty closed subsets of a complete metric space such that is nonempty. Let be a non-self-mapping satisfying and
for all where , ,
Assume that the pair has the weak P-property. Then T has a unique best proximity point in A.
If further in the above corollary we take where , then we deduce another particular result.
Corollary 2.2 Let be a pair of nonempty closed subsets of a complete metric space such that is nonempty. Let be a non-self-mapping satisfying and
for all where , ,
Assume that the pair has the weak P-property. Then T has a unique best proximity point in A.
3 Application to fixed point theory
The case in Theorem 2.1 corresponds to a self-mapping and results in an existence and uniqueness theorem for a fixed point of the map T. We state this case in the next theorem.
Theorem 3.1 Let be a complete metric space. Suppose that A is a nonempty closed subset of X. Let be a mapping such that
where , , ,
Then T has a unique fixed point.
Finally, taking in Theorem 3.1, we get another fixed point result.
Corollary 3.1 Let be a complete metric space. Suppose that A is a nonempty closed subset of X. Let be a mapping such that
where , ,
Then T has a unique fixed point.
Remark 3.1 The best proximity theorem given in this work, more precisely Theorem 2.1, is a quite general result. It is a generalization of Theorem 2.1 in [14], Theorem 8 in [5], and also Theorem 1.2 given in Section 1. In addition, Corollary 3.1 improves Theorem 1.1.
Remark 3.2 Very recently, Karapınar and Samet [15] proved that the function on the set X, where is also a metric on X. Therefore, some of the fixed theorems regarding contraction mappings defined via auxiliary functions from the set Ψ can be in fact deduced from the existing ones in the literature. However, our main result given in Theorem 2.1 is not a consequence of any existing theorems due to the fact that the contraction condition contains the term .
On the other hand, the definition of can be used to show that Theorem 3.1 follows from Corollary 3.1. Nevertheless, Corollary 3.1 and hence Theorem 3.1 are still new results.
References
Banach S: Sur les opérations dans les ensembles abstraits et leur application aux équations intégrales. Fundam. Math. 1922, 3: 133–181.
Al-Thagafi MA, Shahzad N: Convergence and existence results for best proximity points. Nonlinear Anal. 2009, 70: 3665–3671. 10.1016/j.na.2008.07.022
Anuradha J, Veeramani P: Proximal pointwise contraction. Topol. Appl. 2009, 156: 2942–2948. 10.1016/j.topol.2009.01.017
Basha SS, Veeramani P: Best proximity pair theorems for multifunctions with open fibres. J. Approx. Theory 2000, 103: 119–129. 10.1006/jath.1999.3415
Bilgili N, Karapınar E, Sadarangani K: A generalization for the best proximity point of Geraghty-contractions. J. Inequal. Appl. 2013. 10.1186/1029-242X-2013-286
Caballero J, Harjani J, Sadarangani K: A best proximity point theorem for Geraghty-contractions. Fixed Point Theory Appl. 2012. 10.1186/1687-1812-2012-231
Jleli M, Samet B: Best proximity points for α - ψ -proximal contractive type mappings and applications. Bull. Sci. Math. 2013, 137: 977–995. 10.1016/j.bulsci.2013.02.003
Eldred AA, Veeramani P: Existence and convergence of best proximity points. J. Math. Anal. Appl. 2006, 323: 1001–1006. 10.1016/j.jmaa.2005.10.081
De la Sen M: Fixed point and best proximity theorems under two classes of integral-type contractive conditions in uniform metric spaces. Fixed Point Theory Appl. 2010. 10.1155/2010/510974
Karapınar E: Best proximity points of cyclic mappings. Appl. Math. Lett. 2012, 25: 1761–1766. 10.1016/j.aml.2012.02.008
Karapınar, E: On best proximity point of ψ-Geraghty contractions. Preprint
Karapınar E, Erhan IM: Best proximity point on different type contractions. Appl. Math. Inform. Sci. 2011, 3: 342–353.
Karapınar E: Best proximity points of Kannan type cylic weak ϕ -contractions in ordered metric spaces. An. Univ. “Ovidius” Constanţa, Ser. Mat. 2012, 20: 51–64.
Karapınar E: On best proximity point of ψ -Geraghty contractions. Fixed Point Theory Appl. 2013. 10.1186/1687-1812-2013-200
Karapınar E, Samet B: A note on ‘ ψ -Geraghty type contractions’. Fixed Point Theory Appl. 2014. 10.1186/1687-1812-2014-26
Karapınar E, Pragadeeswarar V, Marudai M: Best proximity point for generalized proximal weak contractions in complete metric space. J. Appl. Math. 2013., 2013: Article ID 150941
Kirk WA, Reich S, Veeramani P: Proximinal retracts and best proximity pair theorems. Numer. Funct. Anal. Optim. 2003, 24: 851–862. 10.1081/NFA-120026380
Kumam P, Aydi H, Karapınar E, Sintunavarat W: Best proximity points and extension of Mizoguchi-Takahashi’s fixed point theorem. Fixed Point Theory Appl. 2013. 10.1186/1687-1812-2013-242
Markin J, Shahzad N: Best approximation theorems for nonexpansive and condensing mappings in hyperconvex spaces. Nonlinear Anal. 2009, 70: 2435–2441. 10.1016/j.na.2008.03.045
Mongholkeha C, Cho YJ, Kumam P: Best proximity points for Geraghty’s proximal contraction mappings. Fixed Point Theory Appl. 2013. 10.1186/1687-1812-2013-180
Mongholkeha C, Cho YJ, Kumam P: Best proximity points for generalized proximal C -contraction mappings in metric spaces with partial orders. J. Inequal. Appl. 2013. 10.1186/1029-242X-2013-94
Mongholkeha C, Kumam P: Best proximity points for asymptotic proximal pointwise weaker Meir-Keeler type ψ -contraction mappings. J. Egypt. Math. Soc. 2013, 21(2):87–90. 10.1016/j.joems.2012.12.002
Mongholkeha C, Kumam P: Some common best proximity points for proximity commuting mappings. Optim. Lett. 2013, 7(8):1825–1836. 10.1007/s11590-012-0525-1
Mongholkeha C, Kumam P: Best proximity point theorems for generalized cyclic contractions in ordered metric spaces. J. Optim. Theory Appl. 2012, 155: 215–226. 10.1007/s10957-012-9991-y
Nashine HK, Vetro C, Kumam P: Best proximity point theorems for rationasl proximal contractions, for proximity commuting mappings. Fixed Point Theory Appl. 2013. 10.1186/1687-1812-2013-95
Pragadeeswarar V, Marudai M: Best proximity points: approximation and optimization in partially ordered metric spaces. Optim. Lett. 2012. 10.1007/s11590-012-0529-x
Raj VS, Veeramani P: Best proximity pair theorems for relatively nonexpansive mappings. Appl. Gen. Topol. 2009, 10: 21–28.
Raj VS: A best proximity theorem for weakly contractive non-self mappings. Nonlinear Anal. 2011, 74: 4804–4808. 10.1016/j.na.2011.04.052
Raj, VS: Banach’s contraction principle for non-self mappings. Preprint
Samet B: Some results on best proximity points. J. Optim. Theory Appl. 2013. 10.1007/s10957-013-0269-9
Shahzad N, Basha SS, Jeyaraj R: Common best proximity points: global optimal solutions. J. Optim. Theory Appl. 2011, 148: 69–78. 10.1007/s10957-010-9745-7
Srinivasan PS: Best proximity pair theorems. Acta Sci. Math. 2001, 67: 421–429.
Geraghty M: On contractive mappings. Proc. Am. Math. Soc. 1973, 40: 604–608. 10.1090/S0002-9939-1973-0334176-5
Zhang J, Su Y, Cheng Q: A note on ‘A best proximity point theorem for Geraghty-contractions’. Fixed Point Theory Appl. 2013. 10.1186/1687-1812-2013-99
Acknowledgements
The authors thank to the referees for their careful reading and valuable comments and remarks which contributed to the improvement of the article.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License ( https://creativecommons.org/licenses/by/2.0 ), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Aydi, H., Karapınar, E., Erhan, İ.M. et al. Best proximity points of generalized almost ψ-Geraghty contractive non-self-mappings. Fixed Point Theory Appl 2014, 32 (2014). https://doi.org/10.1186/1687-1812-2014-32
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1812-2014-32