
Abstract
In this paper, we propose an iterative algorithm for finding a common solution of a system of generalized equilibrium problems and a fixed point problem of strictly pseudo-contractive mapping in the setting of real Hilbert spaces. We prove the strong convergence of the sequence generated by the proposed method to a common solution of a system of generalized equilibrium problems and a hierarchical fixed point problem. Preliminary numerical experiments are included to verify the theoretical assertions of the proposed method. The iterative algorithm and results presented in this paper generalize, unify, and improve the previously known results of this area.
MSC:49J30, 47H09, 47J20.
Similar content being viewed by others

1 Introduction
Let H be a real Hilbert space, whose inner product and norm are denoted by and . Let C be a nonempty closed convex subset of H. Recently, Ceng and Yao [1] considered the following system of generalized equilibrium problems, which involves finding :
where is two bifunctions and is a nonlinear mapping for each . The solution set of (1.1) is denoted by Ω.
If , , and , then problem (1.1) becomes the following generalized equilibrium problem: Finding such that
which was studied by Takahashi and Takahashi [2]. Inspired by the work of Takahashi and Takahashi [2], and Ceng et al. [3], Ceng et al. [4] introduced and analyzed an iterative scheme for finding the approximate solutions of the generalized equilibrium problem (1.2), a system of general generalized equilibrium problems (1.1) and a fixed point problem of a nonexpansive mapping in a Hilbert space. Under appropriate conditions, they proved that the sequence converges strongly to a common solution of these three problems. Recently, Ansari [5] studied the existence of solutions of equilibrium problems in the setting of metric spaces. Inspired by the method in [6], Latif et al. [7] introduced and analyzed an iterative algorithm by the hybrid iterative method for finding a solution of the system of generalized equilibrium problems with constraints of several problems: a generalized mixed equilibrium problem, finitely many variational inclusions, and the common fixed point problem of an asymptotically strict pseudo-contractive mapping in the intermediate sense and infinitely many nonexpansive mappings in a real Hilbert space. Under mild conditions, they proved the weak convergence of this iterative algorithm.
If , then problem (1.1) reduces to the following general system of variational inequalities, which involves finding :
this problem was considered and investigated by Ceng et al. [3]. As pointed out in [8] that the system of variational inequalities is used as a tool to study the Nash equilibrium problem; see, for example, [9–11] and the references therein.
If , and , then problem (1.1) reduces to finding such that
which has been introduced and studied by Verma [12, 13].
If and , then problem (1.4) collapses to the classical variational inequality, finding such that
The theory of variational inequalities emerged as a rapidly growing area of research because of its applications in nonlinear analysis, optimization, economics, game theory; see for example [14–17]. For recent applications, numerical techniques, and physical formulation, see [1–50].
The fixed point problem for the mapping T is to find such that
We denote by the set of solutions of (1.5). It is well known that is closed and convex, and is well defined (see [19]).
Let be a nonexpansive mapping, that is, for all . The hierarchical fixed point problem is to find such that
It is linked with some monotone variational inequalities and convex programming problems; see [20]. Various methods have been proposed to solve (1.6); see, for example, [21–35]. By combining Korpelevich’s extragradient method and the viscosity approximation method, Ceng et al. [36] introduced and analyzed implicit and explicit iterative schemes for computing a common element of the set of fixed points of a nonexpansive mapping and the set of solutions of the variational inequality for an α-inverse strongly monotone mapping in a Hilbert space. Under suitable assumptions, they proved the strong convergence of the sequences generated by the proposed schemes. In 2010, Yao et al. [20] introduced the following strong convergence iterative algorithm to solve problem (1.6):
where is a contraction mapping and and are two sequences in . Under some certain restrictions on parameters, Yao et al. proved that the sequence generated by (1.7) converges strongly to , which is the unique solution of the following variational inequality:
In 2011, Ceng et al. [37] investigated the following iterative method:
where U is a Lipschitzian mapping, and F is a Lipschitzian and strongly monotone mapping. They proved that under some approximate assumptions on the operators and parameters, the sequence generated by (1.9) converges strongly to the unique solution of the variational inequality
Very recently, Wang and Xu [38] investigated an iterative method for a hierarchical fixed point problem by
where is a nonexpansive mapping. They proved that under some approximate assumptions on the operators and parameters, the sequence generated by (1.11) converges strongly to the unique solution of the variational inequality (1.10). In 2014, Ansari et al. [39] presented a hybrid iterative algorithm for computing a fixed point of a pseudo-contractive mapping and for finding a solution of triple hierarchical variational inequality in the setting of real Hilbert space. Under very appropriate conditions, they proved that the sequence generated by the proposed algorithm converges strongly to a fixed point which is also a solution of this triple hierarchical variational inequality.
In this paper, motivated by the work of Ceng et al. [4], Yao et al. [20], Bnouhachem [33, 34] and by the recent work going in this direction, we give an iterative method for finding the approximate element of the common set of solutions of (1.1) and (1.6) in real Hilbert space. We establish a strong convergence theorem based on this method. In order to verify the theoretical assertions and to compare the numerical results between the system of generalized equilibrium problems and the generalized equilibrium problems, an example is given. Our results can be viewed as significant extensions of the previously known results.
2 Preliminaries
We present some definitions which will be used in the sequel.
Definition 2.1 A mapping is said to be k-Lipschitz continuous if there exists a constant such that
-
If , then T is called nonexpansive.
-
If , then T is called a contraction.
Definition 2.2 A mapping is said to be
-
(a)
strongly monotone if there exists an such that
-
(b)
α-inverse strongly monotone if there exists an such that
-
(c)
a k-strict pseudo-contraction, if there exists a constant such that
Assumption 2.1 [42]
Let be a bifunction satisfying the following assumptions:
(A1) , ;
(A2) F is monotone, i.e., , ;
(A3) for each , ;
(A4) for each , is convex and lower semicontinuous.
We list some fundamental lemmas that are useful in the consequent analysis.
Lemma 2.1 [43]
Let C be a nonempty closed convex subset of H. Let satisfies (A1)-(A4). Assume that for and , define a mapping as follows:
Then the following hold:
-
(i)
is nonempty and single-valued;
-
(ii)
is firmly nonexpansive, i.e.,
-
(iii)
;
-
(iv)
is closed and convex.
Lemma 2.2 [4]
Let be two bifunctions satisfying (A1)-(A4). For any is a solution of (1.1) if and only if is a fixed point of the mapping defined by
where , , and is a -inverse strongly monotone mapping for each .
Lemma 2.3 [44]
Let C be a nonempty closed convex subset of a real Hilbert space H.
If is a nonexpansive mapping with , then the mapping is demiclosed at 0, i.e., if is a sequence in C that weakly converges to x, and if converges strongly to 0, then .
Lemma 2.4 [37]
Let be a τ-Lipschitzian mapping, and let be a k-Lipschitzian and η-strongly monotone mapping, then for , is μη-ρτ-strongly monotone, i.e.,
Lemma 2.5 [45]
Let C be a nonempty closed convex subset of a real Hilbert space H, and be a k-strict pseudo-contraction mapping. Define by for all . Then as , B is a nonexpansive mapping such that .
Lemma 2.6 [46]
Let H be a real Hilbert space, be a k-Lipschitzian and η-strongly monotone operator. Let , let and , then for , W is a contraction with a constant , that is,
Lemma 2.7 [47]
Let , be bounded sequences in a Banach space E and be a sequence in with .
Suppose , and . Then .
Lemma 2.8 [48]
Assume is a sequence of nonnegative real numbers such that
where is a sequence in and is a sequence such that
-
(1)
;
-
(2)
or .
Then .
Lemma 2.9 [49]
Let C be a closed convex subset of H. Let be a bounded sequence in H. Assume that
-
(i)
the weak w-limit set where ;
-
(ii)
for each , exists.
Then is weakly convergent to a point in C.
Lemma 2.10 [50]
Let H be a real Hilbert space. Then the following inequality holds:
3 The proposed method and some properties
In this section, we suggest and analyze our method for finding the common solutions of the system of the generalized equilibrium problem (1.1) and the hierarchical fixed point problem (1.6). Let C be a nonempty closed convex subset of a real Hilbert space H. Let be two bifunctions satisfying (A1)-(A4). Let be a -inverse strongly monotone mapping for each , and let be a σ-strict pseudo-contraction mapping such that . Let be a k-Lipschitzian mapping and be η-strongly monotone, and let be a τ-Lipschitzian mapping.
Algorithm 3.1 For an arbitrarily given , let the iterative sequences , , and be generated by
where for each . Suppose the parameters satisfy , , where . Also , , and are sequences in satisfying the following conditions:
-
(a)
;
-
(b)
and ;
-
(c)
and .
If , , and , then Algorithm 3.1 reduces to Algorithm 3.2 for finding the common solutions of the generalized equilibrium problem (1.2) and the hierarchical fixed point problem (1.6).
Algorithm 3.2 For an arbitrarily given arbitrarily, let the iterative sequences , , , and be generated by
Suppose that the parameters satisfy , , where . Also , , and are sequences in satisfying the following conditions:
-
(a)
;
-
(b)
and ;
-
(c)
and .
Remark 3.1 If , , and , we obtain an extension and improvement of the method of Yao et al. [20] and Wang and Xu [38] for finding the approximate element of the common set of solutions of a system of generalized equilibrium problem and a hierarchical fixed point problem in a real Hilbert space.
Lemma 3.1 Let . Then , , and are bounded.
Proof Let , we have
where
We set . Since is a -inverse strongly monotone mapping, it follows that
Since is a -inverse strongly monotone mapping for each , we get
By Lemma 2.5 and the inequality above, it is easy to show that
Next, we prove that the sequence is bounded. Since , without loss of generality we can assume that for all , where . From (3.1) and (3.4), we have
where the third inequality follows from Lemma 2.6 and the fourth inequality follows from (3.4). By induction on n, we obtain , for and . Hence is bounded, and consequently we deduce that , , , , , and are bounded. □
Lemma 3.2 Let and be the sequence generated by Algorithm 3.1. Then we have:
-
(a)
.
-
(b)
The weak w-limit set ().
Proof Next, we estimate
From (3.1) and (3.5), we have
We define , which implies that . It follows from (3.6) that
Since , , and , we get
By Lemma 2.7, we have . Since , we obtain
Next, we estimate
which implies
Since and , we have
Next, we show that . Since by using Lemma 2.10, (3.4), and (3.3), we obtain
which implies that
Since , , , and , we obtain
and
Since is firmly nonexpansive, we have
Hence, we get
On the other hand, from (3.1) and Lemma 2.1(ii), we obtain
which implies that
where the last inequality follows from (3.10). From (3.9) and the above inequality, we have
which implies that
Since , , , , , we obtain
Since
we get
It follows from (3.8) and (3.11) that
We define a mapping by with . It follows from Lemma 2.5 that W is a nonexpansive mapping and . Note that
Since and , we obtain
Since is bounded and without loss of generality we can assume that , from (3.11), it is easy to observe that . It follows from Lemma 2.3 that . Therefore . □
Theorem 3.1 The sequence generated by Algorithm 3.1 converges strongly to z, which is the unique solution of the variational inequality
Proof Since is bounded and from Lemma 3.2, we have . Next, we show that . Since and there exists a subsequence of such that , it is easy to observe that . For any , using (2.1), we have
This implies that is nonexpansive. On the other hand
Since (see (3.11)), we have . It follows from Lemma 2.3 that , which implies from Lemma 2.2 that . Thus we have
Since , from Lemma 2.4, the operator is μη-ρτ-strongly monotone, and we get the uniqueness of the solution of the variational inequality (3.13) and denote it by .
Next, we claim that . Since is bounded, there exists a subsequence of such that
Next, we show that . We have
which implies that
Let and .
We have
and
It follows that
Thus all the conditions of Lemma 2.8 are satisfied. Hence we deduce that . This completes the proof. □
4 Applications
To verify the theoretical assertions, we consider the following example.
Example 4.1 Let , , and .
It is easy to show that the sequence satisfies condition (a).
We have
and
The sequence satisfies condition (b).
Let ℝ be the set of real numbers, , and let the mapping be defined by
let the mapping be defined by
let the mapping be defined by
It is easy to show that T is a 1-Lipschitzian mapping and -strongly monotone, S is a 0-strict pseudo-contraction mapping and f is -Lipschitzian. Let the mapping be defined by
By the definition of , we have
Then
Let . is a quadratic function of y with coefficients , , . We determine the discriminant Δ of A as follows:
We have , . If it has at most one solution in ℝ, then , we obtain
Let the mapping be defined by
By the definition of , we have
Then
Let . is a quadratic function of y with coefficients , , . We determine the discriminant Δ of B as follows:
We have , . If it has at most one solution in ℝ, then , we obtain
For every , from (4.1) and (4.2), we rewrite (3.1) as follows:
In all tests we take and . In our example , , . It is easy to show that the parameters satisfy , , where . All codes were written in Matlab, the values of , , and with different n are reported in Tables 1 and 2.
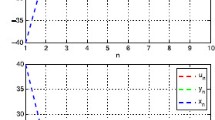
Remark 4.1 Tables 1 and 2, and Figures 1 and 2 show that the sequences , , and converge to 0, where . Also Tables 1 and 2 show that the convergence of Algorithm 3.1 is faster than Algorithm 3.2.

The convergence of , , and with initial value for Algorithm 3.1 and Algorithm 3.2 with and with .

The convergence of , , and with initial value for Algorithm 3.1 and Algorithm 3.2 with and with .
5 Conclusions
In this paper, we suggest and analyze an iterative method for finding the approximate element of the common set of solutions of (1.1) and (1.6) in real Hilbert space, which can be viewed as a refinement and improvement of some existing methods for solving equilibrium problem, and a hierarchical fixed point problem. Strong convergence of the proposed method is proved under mild assumptions. Furthermore, some preliminary numerical results are reported to verify the theoretical assertions of the proposed method and show that our algorithm for the system of generalized equilibrium problems is more attractive in practice than our algorithm for the generalized equilibrium problems.
References
Ceng LC, Yao JC: A relaxed extragradient-like method for a generalized mixed equilibrium problem, a general system of generalized equilibria and a fixed point problem. Nonlinear Anal. 2010, 72: 1922–1937. 10.1016/j.na.2009.09.033
Takahashi S, Takahashi W: Strong convergence theorem for a generalized equilibrium problem and a nonexpansive mapping in a Hilbert space. Nonlinear Anal. 2008, 69: 1025–1033. 10.1016/j.na.2008.02.042
Ceng LC, Wang CY, Yao JC: Strong convergence theorems by a relaxed extragradient method for a general system of variational inequalities. Math. Methods Oper. Res. 2008, 67: 375–390. 10.1007/s00186-007-0207-4
Ceng LC, Ansari QH, Schaible S, Yao JC: Iterative methods for generalized equilibrium problems, systems of general generalized equilibrium problems and fixed point problems for nonexpansive mappings in Hilbert spaces. Fixed Point Theory 2011, 12(2):293–308.
Ansari QH: Metric Spaces: Including Fixed Point Theory and Set-Valued Maps. Narosa Publishing House, New Delhi; 2010.
Reich S, Sabach S: Three strong convergence theorems regarding iterative methods for solving equilibrium problems in reflexive Banach spaces. Contemp. Math. 2012, 568: 22–240.
Latif A, Al-Mazrooei AE, Alofi AS, Yao JC: Hybrid iterative method for systems of generalized equilibria with constraints of variational inclusion and fixed point problems. Fixed Point Theory Appl. 2014., 2014: Article ID 164
Ceng LC, Al-Mezel SA, Anasri QH: Implicit and explicit iterative methods for systems of variational inequalities and zeros of accretive operators. Abstr. Appl. Anal. 2013., 2013: Article ID 631382
Ansari QH, Yao JC: Systems of generalized variational inequalities and their applications. Appl. Anal. 2000, 76: 203–217. 10.1080/00036810008840877
Aubin JP: Mathematical Methods of Game and Economic Theory. North-Holland, Amsterdam; 1979.
Facchinei F, Pang JS II. In Finite-Dimensional Variational Inequalities and Complementarity Problems. Springer, New York; 2003.
Verma RU: Projection methods, algorithms, and a new system of nonlinear variational inequalities. Comput. Math. Appl. 2001, 41: 1025–1031. 10.1016/S0898-1221(00)00336-9
Verma RU: General convergence analysis for two-step projection methods and applications to variational problems. Appl. Math. Lett. 2005, 18: 1286–1292. 10.1016/j.aml.2005.02.026
Ansari QH, Wong NC, Yao JC: The existence of nonlinear inequalities. Appl. Math. Lett. 1999, 12(5):89–92. 10.1016/S0893-9659(99)00062-2
Bnouhachem A: A self-adaptive method for solving general mixed variational inequalities. J. Math. Anal. Appl. 2005, 309(1):136–150. 10.1016/j.jmaa.2004.12.023
Bnouhachem A: A new projection and contraction method for linear variational inequalities. J. Math. Anal. Appl. 2006, 314(2):513–525. 10.1016/j.jmaa.2005.03.095
Ansari QH, Lalitha CS, Mehta M: Generalized Convexity, Nonsmooth Variational Inequalities and Nonsmooth Optimization. CRC Press, Boca Raton; 2014.
Ansari QH, Rehan A: Split feasibility and fixed point problems. In Nonlinear Analysis: Approximation Theory, Optimization and Applications. Edited by: Ansari QH. Birkhäuser, Basel; 2014:281–322.
Zhou H: Convergence theorems of fixed points for k -strict pseudo-contractions in Hilbert spaces. Nonlinear Anal. 2008, 69: 456–462. 10.1016/j.na.2007.05.032
Yao Y, Cho YJ, Liou YC: Iterative algorithms for hierarchical fixed points problems and variational inequalities. Math. Comput. Model. 2010, 52(9–10):1697–1705. 10.1016/j.mcm.2010.06.038
Crombez G: A hierarchical presentation of operators with fixed points on Hilbert spaces. Numer. Funct. Anal. Optim. 2006, 27: 259–277. 10.1080/01630560600569957
Mainge PE, Moudafi A: Strong convergence of an iterative method for hierarchical fixed-point problems. Pac. J. Optim. 2007, 3(3):529–538.
Moudafi A: Krasnoselski-Mann iteration for hierarchical fixed-point problems. Inverse Problems 2007, 23(4):1635–1640. 10.1088/0266-5611/23/4/015
Cianciaruso F, Marino G, Muglia L, Yao Y: On a two-steps algorithm for hierarchical fixed point problems and variational inequalities. J. Inequal. Appl. 2009., 2009: Article ID 208692
Gu G, Wang S, Cho YJ: Strong convergence algorithms for hierarchical fixed points problems and variational inequalities. J. Appl. Math. 2011., 2011: Article ID 164978
Marino G, Xu HK: Explicit hierarchical fixed point approach to variational inequalities. J. Optim. Theory Appl. 2011, 149(1):61–78. 10.1007/s10957-010-9775-1
Ceng LC, Ansari QH, Yao JC: Iterative methods for triple hierarchical variational inequalities in Hilbert spaces. J. Optim. Theory Appl. 2011, 151: 489–512. 10.1007/s10957-011-9882-7
Bnouhachem A, Noor MA: An iterative method for approximating the common solutions of a variational inequality, a mixed equilibrium problem and a hierarchical fixed point problem. J. Inequal. Appl. 2013., 2013: Article ID 490
Bnouhachem A: Algorithms of common solutions for a variational inequality, a split equilibrium problem and a hierarchical fixed point problem. Fixed Point Theory Appl. 2013., 2013: Article ID 278
Bnouhachem A: An iterative method for a common solution of generalized mixed equilibrium problems, variational inequalities, and hierarchical fixed point problems. Fixed Point Theory Appl. 2014., 2014: Article ID 155
Bnouhachem A: A hybrid iterative method for a combination of equilibrium problem, a combination of variational inequality problem and a hierarchical fixed point problem. Fixed Point Theory Appl. 2014., 2014: Article ID 163
Bnouhachem A, Al-Homidan S, Ansari QH: An iterative method for common solutions of equilibrium problems and hierarchical fixed point problems. Fixed Point Theory Appl. 2014., 2014: Article ID 194
Bnouhachem A: A modified projection method for a common solution of a system of variational inequalities, a split equilibrium problem and a hierarchical fixed-point problem. Fixed Point Theory Appl. 2014., 2014: Article ID 22
Bnouhachem A: Strong convergence algorithm for approximating the common solutions of a variational inequality, a mixed equilibrium problem and a hierarchical fixed-point problem. J. Inequal. Appl. 2014., 2014: Article ID 154
Ceng LC, Al-Mezel SA, Latif A: Hybrid viscosity approaches to general systems of variational inequalities with hierarchical fixed point problem constraints in Banach spaces. Abstr. Appl. Anal. 2014., 2014: Article ID 945985
Ceng LC, Khan AR, Ansari QH, Yao JC: Viscosity approximation methods for strongly positive and monotone operators. Fixed Point Theory 2009, 10(1):35–71.
Ceng LC, Anasri QH, Yao JC: Some iterative methods for finding fixed points and for solving constrained convex minimization problems. Nonlinear Anal. 2011, 74(16):5286–5302. 10.1016/j.na.2011.05.005
Wang Y, Xu W: Strong convergence of a modified iterative algorithm for hierarchical fixed point problems and variational inequalities. Fixed Point Theory Appl. 2013., 2013: Article ID 121
Ansari QH, Ceng LC, Gupta H: Triple hierarchical variational inequalities. In Nonlinear Analysis: Approximation Theory, Optimization and Applications. Edited by: Ansari QH. Birkhäuser, Basel; 2014:231–280.
Censor Y, Gibali A, Reich S: Algorithms for the split variational inequality problem. Numer. Algorithms 2012, 59(2):301–323. 10.1007/s11075-011-9490-5
Moudafi A: Split monotone variational inclusions. J. Optim. Theory Appl. 2011, 50: 275–283.
Blum E, Oettli W: From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63: 123–145.
Combettes PL, Hirstoaga SA: Equilibrium programming using proximal-like algorithms. Math. Program. 1997, 78: 29–41.
Geobel K, Kirk WA Stud. Adv. Math. 28. In Topics in Metric Fixed Point Theory. Cambridge University Press, Cambridge; 1990.
Zhou HY: Convergence theorems of fixed points for κ -strict pseudo-contractions in Hilbert spaces. Nonlinear Anal. 2008, 69: 456–462. 10.1016/j.na.2007.05.032
Deng BC, Chen T, Li ZF: Cyclic iterative method for strictly pseudononspreading in Hilbert space. J. Appl. Math. 2012., 2012: Article ID 435676
Suzuki T: Strong convergence of Krasnoselskii and Mann’s type sequences for one parameter nonexpansive semigroups without Bochner integrals. J. Math. Anal. Appl. 2005, 305(1):227–239. 10.1016/j.jmaa.2004.11.017
Xu HK: Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 2002, 66: 240–256. 10.1112/S0024610702003332
Acedo GL, Xu HK: Iterative methods for strict pseudo-contractions in Hilbert space. Nonlinear Anal. 2007, 67(7):2258–2271. 10.1016/j.na.2006.08.036
Marino G, Xu HK: Convergence of generalized proximal point algorithms. Commun. Pure Appl. Anal. 2004, 3: 791–808.
Acknowledgements
The author would like to thank Prof. Xindan Li, Dean of School of Management and Engineering of Nanjing University, for providing excellent research facilities.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
Cite this article
Bnouhachem, A. An iterative algorithm for system of generalized equilibrium problems and fixed point problem. Fixed Point Theory Appl 2014, 235 (2014). https://doi.org/10.1186/1687-1812-2014-235
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1812-2014-235