Abstract
We calculated radiated seismic energy (ES), seismic moment (M0), and moment magnitude (MW) and then determined the ES–ML, ES–M0, M0–ML, and MW–ML relations for the 2021 Shoufeng earthquake sequence (2.5 < ML < 6.3), where ML is the local magnitude. Notably, a crossover magnitude was detected as ML = 4.0 for the earthquake sequence. For ML < 4.0, we obtained logM0 ∝ ML, MW ∝ 0.67ML, and a low ES/M0, indicating a low average stress drop; for ML > 4.0, logM0 ∝ 0.67ML, MW ∝ ML, and a high ES/M0 were present, and then there was a high average stress drop. These derived relations implied that source duration (T) is independent of M0 for ML < 4.0. Moreover, the M0 ∝ T3 relation seemed able to interpret those relations for ML > 4.0. Nevertheless, the ES–ML relation remains logES ∝ 2.0ML for 2.5 < ML < 6.3. From this study, the derived relations could not predict the source parameters for ML > 6.3 events. This might indicate that ML saturates beyond ML 6.3. Through such analyses, we not only established the relations among source parameters but also elucidated the basic physics of the earthquake sequence.
Key points
-
logEs is proportional to 2.0ML for the Shoufeng earthquake sequence in Taiwan.
-
A crossover magnitude detected at ML = 4.0 divides the MW–ML relation into two parts.
-
For ML > 4.0, logM0 ∝ 0.67ML and MW ∝ ML; for ML < 4.0, logM0 ∝ ML and MW ∝ 0.67ML.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
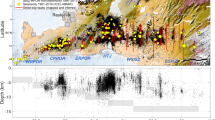
Since the 2018 MW 6.4 (ML 6.2) Hualien earthquake occurred (cf. Rau and Tseng 2019), high seismicity in the Hualien region has persisted for a while (also refer to the Central Weather Bureau (CWB); https://scweb.cwb.gov.tw/en-US). More than a thousand aftershocks (ML ≥ 2) followed the 2018 event within 3 months. Close behind the 2018 event, the Xiulin earthquake with MW 6.2 (ML 6.3) occurred approximately 18 km southeast of the 2018 event, on April 18, 2019 (cf. Lee et al. 2020). Soon after the 2019 event, the Shoufeng earthquake, an MW 5.2 (ML 5.7) event, occurred on February 15, 2020, approximately 22 km south of the 2019 event (see Fig. 1). Approximately 1 year later, on April 18, 2021, an ML 5.8 earthquake occurred again in the Shoufeng region, Hualien; 3 min later, an ML 6.2 earthquake (refined to be 6.26) occurred almost at the same location as the ML 5.8 event (Fig. 1). Subsequently, approximately 500 aftershocks occurred. At first, the aftershocks were distributed around the ML 5.8 and ML 6.2 events; later, the aftershocks were distributed eastwards and became shallower (≤ 10-km depth). The two moderate-sized earthquakes seemed to feature a similar plane along a NE-SW strike based on the focal mechanisms (Fig. 1). The cross-section of the earthquake sequence along line BB′ in Fig. 1 indicated a west-dipping plane, which might be the fault plane for the two 2021 events. In this study, we did not analyze the rupture features of the ML 5.8 and ML 6.2 Shoufeng earthquakes but investigated the source parameters of the earthquake sequence, including the seismic moment (M0), radiated seismic energy (ES), and moment magnitude (MW). Examining the ML 5.8 and ML 6.2 Shoufeng earthquakes’ rupture feature would be a separate issue.

(Left) Map showing the tectonic setting of the Taiwan region. Several moderate and large earthquakes compared with the Shoufeng earthquake sequence are also plotted. (Middle) Seismicity in the Shoufeng region, Hualien County, Taiwan. The red-tone circles denote aftershocks occurring before June 8, 2021; the blue-tone circles show aftershocks occurring after June 8, 2021. The stars indicate the two 2021 Shoufeng earthquakes and several moderate-sized earthquakes occurring around the source area of the 2021 events. Also included are the focal mechanisms reported from the BATS (IES 1996). (Right) AA′ and BB′ profiles reveal that these events are distributed at different depths (< 25 km). The cross-section of these events along line BB′ shows a west-dipping plane, which might be the fault plane of the two 2021 events
For earthquakes, ES is one of the key source parameters needed to understand dynamic rupture because ES is strongly related to static stress drop (Δσ), dynamic stress drop (Δσd), and fracture energy (Eg) (cf. Kanamori and Heaton 2000; Kanamori 2001). Here, Δσ and Δσd are defined as σ0–σ1 and σ0–σf, where σ0, σ1, and σf are the initial stress, final stress, and frictional stress, respectively; Eg is the erergy that extends the fault during the earthquake. A derivative parameter called scaled energy, which is defined as the ratio of ES to M0, is often used to indicate the friction drops during the earthquake rupture (Kanamori and Heaton 2000) and also represents the average stress drop on the fault plane (Houston 1990; Kanamori et al. 1993). For large earthquakes, ES/M0 is almost equal to a constant, 5 × 10−5 (Kanamori 1977); however, Ide and Beroza (2001) reported a ES/M0 of 3 × 10−5 for a wide M0 range. For small earthquakes, ES/M0 is approximately 10–100 times smaller than large earthquakes (Abercrombie 1995; Mayeda and Walter 1996; Kanamori and Heaton 2000). Generally, ES can be calculated through the integral of velocity-squared seismograms after certain appropriate corrections are made (cf. Boatwright and Choy 1986; Newman and Okal 1998; Kanamori et al. 1993; Venkataraman et al. 2006). Although ES only represents a portion of strain energy (W) released during an earthquake and is approximately 10% less than W (McGarr 1999), it is a key source parameter for understanding earthquakes’ dynamic ruptures.
Gutenberg and Richter (1956) constructed a relationship between surface magnitude (MS) and logES as logES = 1.5MS + 4.8 (ES in Nm). This indicates that logES is proportional to 1.5MS. Such a relation is capable of being theoretically verified (Kanamori and Anderson 1975). However, most studies have revealed that logES is proportional to 2.0ML (Thatcher and Hanks 1973; Seidl and Berckhemer 1982; Kanamori et al. 1993; Dineva and Mereu 2009). Deichmann (2018a) further confirmed that logES scales as 2.0ML by using numerical simulations. In Taiwan, Huang (2003) first used regional broadband seismic data to establish the relationship between logES and ML, indicating that logES ∝ 2.0ML. Chan et al. (2020) also obtained logES ∝ 2.0ML for the 2019 Xiulin earthquake sequence. In addition, the observed scale between MW and ML (MW:ML) ranges from 1:0.67 to 1:1.5 (Hanks and Kanamori 1979; Margaris and Papazachos 1999; Wu 2000; Wu et al. 2005; Chen et al. 2009; Grünthal et al. 2009; Sargeant and Ottemöller 2009; Bethmann et al. 2011; Zollo et al. 2014; Deichmann 2017; Munafò et al. 2016; Malagnini and Munafò 2018; Mereu 2020). For Taiwan’s earthquakes, Wu et al. (2005) obtained MW ∝ ML; however, Chen et al. (2009) derived MW ∝ 1.25ML. Regarding the Shoufeng earthquake sequence, what is the relation between MW and ML? Hence, in this study, we not only calculated ES for the 2021 Shoufeng earthquake sequence from near-field broadband seismograms but also constructed the logES–ML relationship to infer whether logES ∝ 2.0ML does or does not hold. Furthermore, several relations between source parameters were also discussed, namely the ES–M0, logM0–ML, and MW–ML relations. Such analysis can be used to systemically examine the relationships among source parameters for earthquakes in Taiwan in the future.
2 Data
Velocity seismograms from the Broadband Array in Taiwan for Seismology (BATS; Institute of Earth Sciences (IES), Academia Sinica, Taiwan 1996) were adopted to analyze the radiated seismic energy (ES) of the two moderate-sized earthquakes and their aftershocks occurring in the Shoufeng region, Hualien County, Taiwan. To reduce the effect of complicated structures on wave propagations, we only used data with epicentral distances of less than 50 km. Therefore, the seismic waves propagated approximately within a half-space material (Kanamori 1990). ES is mainly expressed in the S-wave, so ES is generally estimated through the S-wave (cf. Boatwright and Fletcher 1984; Kanamori et al. 1993; Venkataraman et al. 2006). However, it would be not easy to determine the S-wave train when using near-field seismograms. For this reason, we derived ES from only P-waves. Finally, the ES values from P-waves would be corrected to obtain the total energy by introducing energy partitioning between the P and S waves (Boatwright and Choy 1986; Newman and Okal 1998). Because of noise interference, for stably calculating ES, seismograms from various ML were filtered by different frequency bands. Here, a noise test was first made to determine the frequency band for filtering. Figure 2 provides an example of a noise test at station NACB for 2.5 < ML < 4.5 events. We summarized the noise test from each station. Finally, for events with ML ≥ 4.0, the frequency band for filtering was 0.1–10 Hz; for events with 3.5 ≤ ML < 4.0, we used 1–10 Hz to filter these seismograms; the events with 3.0 ≤ ML < 3.5 were filtered from 2 to 10 Hz; for events with 2.5 ≤ ML < 3.0, the band-pass filter with frequencies between 3 and 8 Hz was employed.

Example of noise test at station NACB for 2.5 < ML < 4.5 events to examine the frequency range (FR) used for the follow-up analysis. Obviously, small-sized events have a relatively narrow FR. For ML ≥ 4.0, 3.5 ≤ ML < 4.0, 3.0 ≤ ML < 3.5, and 2.5 ≤ ML < 3.0 events, FR = 0.1–10 Hz, 1–10 Hz, 2–10 Hz, and 3–8 Hz, respectively
3 Methods
3.1 Radiated seismic energy (ES)
Radiated seismic energy from the P-wave, called \(E_{S}^{P}\), is measured using the integration of the squared velocity records (\(v\left( t \right)^{2}\)) from a given station (cf. Boatwright and Fletcher 1984; Kanamori et al. 1993), as follows:
where \(\alpha\) and \(\rho\) are the P-wave velocity and the density at the source area, respectively; \(r\) is the hypocentral distance, representing the geometrical spreading for seismic-wave propagation; \(t_{a}\) and \(t_{b}\), determined manually, are the time band for integration; \(R\) is the radiation pattern depending on the focal mechanism; \(\langle R\rangle\) is the average radiation pattern over a focal sphere and equates to 0.52 for the P-wave (Aki and Richards 2002). In Eq. (1), \(\frac{{\langle R\rangle^{2} }}{{R^{2} }}\) is assumed to be 1.0 by using the average radiation patterns for all stations, as proposed by Kanamori et al. (1993).
Before calculating \(E_{S}^{P}\), several corrections to the P-waves needed to be made, including correcting the effects of the free surface and attenuation. The free surface effect was calculated using the incident angle of the P-wave to the receiver (cf. Okal 1992; Aki and Richards 2002), and \(t^{*} = 0.029\) was employed to correct the P-wave attenuation from source to receiver following the work of Chan et al. (2020) (also see 5.). Finally, the total radiated seismic energy (ES), the sum of the P-wave energy (\(E_{S}^{P}\)) and the S-wave energy (\(E_{S}^{S}\)) was calculated as follows:
where \(q\) is the ratio of the S-wave energy to the P-wave energy and is defined as \(1.5\left( {\frac{\alpha }{\beta }} \right)^{5}\) and \(\alpha\) and \(\beta\) are the P-wave and S-wave velocities at the source, respectively. For a Poisson material, \(q\) is equal to 23.4 due to \(\alpha = \sqrt 3 \beta\). Many observations also show \(q\) varying between 9 and 25 (cf. Shearer 2009). In this study, the travel times of the P-waves and S-waves were estimated from source to station for each earthquake to obtain the average \(\alpha\) and \(\beta\) values, which were used to calculate \(q\). Finally, for a given earthquake, we calculated the average of the available ES values from each station to be the ES of the event.
In theory, ES should be estimated over a frequency range of 0–∞ Hz; however, in practice, ES is generally calculated at a finite frequency bandwidth and is apt to be underestimated (Di Bona and Rovelli 1988; Ide and Beroza 2001; Wang 2004). Therefore, the finite frequency bandwidth limitation needs correcting, especially for high-frequency parts. Such correction is dependent on the corner frequency.
3.2 Corner frequency (f c) and seismic moment (M0)
For correcting the finite frequency bandwidth limitation in the calculation of ES, we first derived the corner frequency (fc) from the displacement and velocity P-waves. According to the ω−2 source model (Aki 1967; Brune 1970), Andrews (1986) derived fc as follows:
where \(I_{v} = \mathop \smallint \limits_{{t_{a} }}^{{t_{b} }} v^{2} \left( t \right)dt\) and \(I_{d} = \mathop \smallint \limits_{{t_{a} }}^{{t_{b} }} d^{2} \left( t \right)dt\). \(v\left( t \right)\) and \(d\left( t \right)\) are the observed velocity and displacement P-waves, respectively. \(t_{a}\) and \(t_{b}\) are the time band for integration. In the ω−2 source model, fc is defined as the crossover frequency between the low- and high-frequency spectra. For f < fc, the spectrum is approximately a constant; for f > fc, the spectrum decays with f−2 (also see 5.).
Seismic moment (M0) is expressed in the following form:
where \({\Omega }_{0} = 2I_{v}^{ - 1/4} I_{d}^{3/4}\) is the low-frequency spectral level (Andrews 1986); \(\langle R\rangle = 0.52\) for the P-wave; \(\alpha\) and \(\rho\) are the P-wave velocity and density at the source area, respectively. Before calculating \({\Omega }_{0}\), the effects due to the free surface and attenuation on the P-waves were corrected. For a given earthquake, we averaged the available M0 calculated from each station to be the M0 of this event.
3.3 Finite frequency bandwidth correction
On the basis of Parseval’s theorem, the integral of the square of a time function is equivalent to that of the square of its spectrum, that is, \(I_{v} = \mathop \smallint \limits_{ - \infty }^{\infty } v^{2} \left( t \right)dt = \mathop \smallint \limits_{ - \infty }^{\infty } V^{2} \left( f \right)df\), where \(V\left( f \right)\) is the Fourier transform of \(v\left( t \right)\). Because of the finite frequency bandwidth used for the observed P-waves, the real integrals are as follows:
where \(f_{l}\) and \(f_{u}\) are the integral range with \(f_{l} < f_{c} < f_{u}\), and \(\kappa_{v}\) (≤ 1.0) is the proportion of finite ES (observation) to full ES. Here, \(\kappa_{v}\) is expressed in the following form (cf. Ide and Beroza 2001; Wang 2004):
Ide and Beroza (2001) indicated that over 80% of the radiated seismic energy is created from high frequencies larger than the corner frequency. Because ES should be calculated over an infinite frequency, the observed ES from a finite frequency should be corrected by \(\kappa_{v}\), that is \({\text{E}}_{{{\text{SC}}}} = {\text{E}}_{{\text{S}}} /\kappa_{v}\), where ESC is the corrected ES. In other words, through \(\kappa_{v}\), we can restructure ES for a given earthquake.
4 Results and discussion
4.1 ES versus ML
Figure 3 displays a plot of logES versus ML for 2.5 < ML < 5.5 and the ML 5.8 and ML 6.2 events. The ML values were from the earthquake catalog of the CWB, which routinely reports earthquake parameters in Taiwan. From Fig. 3, ES increased with increasing ML, and a linear relationship between logES and ML was present for 2.5 < ML < 5.5 events as logES = 1.99 ML + 2.06 (ES in Nm). The empirical relation initially derived from 2.5 < ML < 5.5 events seemed to be able to predict ES for the ML 5.8 and ML 6.2 events. Therefore, by incorporating the two 2021 events into the regression, we obtained the logES–ML relation as follows.

Relation between logES and ML, where ES is the radiated seismic energy and ML is the local magnitude. The logES–ML relation has a slope of 1.98; therefore, logES is almost proportional to 2.0ML. For comparison, also included in this plot are the ES of several earthquakes in Taiwan (IRIS DMC 2013; Venkataraman and Kanamori 2004; Wang 2004; Hwang 2012; Hwang et al. 2019, 2022; also see Table 1). The blue dashed lines denote the standard deviations
Our results agreed well with logES ∝ 2.0ML and are similar to the logES–ML relation, that is, logES = 1.96ML + 9.05 (Es in erg), proposed by Kanamori et al. (1993) for 1.5 < ML < 6.0 earthquakes in southern California. Likewise, Chan et al. (2020) analyzed ES for the 2019 Xiulin earthquake sequence to reveal logES ∝ 2.0ML for 2.5 < ML < 4.3 events. Many previous studies have also indicated that logES ∝ 2.0ML holds at different ML ranges, from 1 to 7 (Thatcher and Hanks 1973; Seidl and Berckhemer 1982; Kanamori et al. 1993; Dineva and Mereu 2009).
ML is determined using seismograms recorded by Wood–Anderson seismographs (Richter 1935) and proportional to M0 (Randall 1973; Deichmann 2006). Then, logES will scale as 1.5ML following source self-similarity (Aki 1967; Kanamori and Anderson 1975). However, from numerical simulations for − 1 ≤ ML ≤ 6, Deichmann (2018a) further stated what conditions are valid for logES ∝ 2.0ML. For small earthquakes (ML ≤ 3.0), logES ∝ 2.0ML is inevitable because earthquake duration approaches constant; for larger earthquakes, it happens to be consistent with the logES–2.0ML relation because of the effect of the Wood–Anderson response when calculating ML (Deichmann 2018a). Chan et al. (2020, 2021) investigated the logES–ML relation for the 2019 Xiulin aftershocks (2.5 ≤ ML < 4.3) to obtain logES ∝ 2.0ML as well as to find the constant-tending duration for those small events. Although Malagnini and Munafò (2018) noted a crossover magnitude at approximately ML = 4.3 for the MW–ML relation, where MW is the moment magnitude (Kanamori 1977; Hanks and Kanamori 1979), logES was still proportional to 2.0ML for a wide ML range (1–7; Thatcher and Hanks 1973; Seidl and Berckhemer 1982; Kanamori et al. 1993; Dineva and Mereu 2009).
Kanamori et al. (1993) concluded that ML < 6.5 events do not saturate with increasing ES because the derived relationship could not predict the ES of the 1992 ML 6.8 (Mw 7.3) Landers earthquake. Similarly, from the 2019 Xiulin aftershocks, the logES–ML relationship, analyzed by Chan et al. (2020), also failed to predict the ES of the 2019 ML 6.3 Xiulin earthquake (mainshock). Figure 3 also illustrates the ES values for several ML > 6 earthquakes in Taiwan (Venkataraman and Kanamori 2004; Wang, 2004; Hwang 2012; Hwang et al. 2019, 2022; Table 1). The derived ES–ML relation does not seem to satisfactorily predict the ES values for ML larger than 6.3 other than the ES of the 1999 Chi–Chi earthquake from Wang (2004). This also implies that ML saturates for events with ML > 6.3. Besides, whether a difference exists between the eastern and western fault systems for the ES–ML relation is worth investigating further.
4.2 ES versus M0
Figure 4 displays a comparison of M0 from the BATS and M0 from this study for ML > 3.5. The two M0 values have high consistency, indicating that our estimations of M0 through the method of Andrews (1986) are valid (Kao et al. 1998; IES 1996). Such analysis has the advantage of calculating M0 for small earthquakes.

Comparison of M0 from the BATS and M0 from this study for ML > 3.5. M0 derived from the method of Andrews (1986) coincides with that determined from the BATS using moment tensors inversion
ES is a dynamic source parameter and can describe the stress state and friction drops during an earthquake (Houston 1990; Kanamori et al. 1993; Kanamori and Heaton 2000). A low ES/M0 shows that the friction drops gradually during faulting; however, a high ES/M0 denotes the fact that the friction drops rapidly. Then, it would result in various stress drops, including static and dynamic stress drops. Therefore, the ES/M0 ratio provides a measurement of the average stress drop on the fault. Figure 5 illustrates the plot of ES vs. M0. As can be seen, ES increases with increasing M0. Additionally, ES/M0 also varies with ML for the earthquake sequence, as displayed in the inset of Fig. 5. On average, for 2.5 < ML < 3.5, 3.5 < ML < 4.5, and ML > 4.5, ES/M0 is 5.3 × 10−6, 6.3 × 10−5, and 2.7 × 10−4, respectively. Except that ES/M0 = 6 × 10–5 for 3.5 < ML < 4.5, the others differ from the global observations of 5 × 10−5 (Kanamori 1977) and 3 × 10−5 (Ide and Beroza 2001). Although the ratio ES/M0 in this study reveals differences to the global values, variations in ES/M0 with ML (or MW) have also been observed in many other studies (e.g., Abercrombie 1995; Mayeda and Walte 1996; Kanamori and Heaton 2000). When ignoring the fracture energy, the corresponding Orowan stress drop, defined as \(\Delta \sigma = 2\mu \frac{{E_{S} }}{{M_{0} }}\), where \(\mu\) is the rigidity (Orowan 1960; Houston 1990; Kanamori et al. 1993), varies from 3 (small events) to 40 and 160 (larger events) bar on average. In other words, the ES/M0 ratio reveals the strength heterogeneities on the fault plane.

The ES–M0 plot. ES increases with increasing M0. ES/M0 = 5 × 10−5 is from Kanamori (1977) for large earthquakes, and ES/M0 = 3 × 10−5 is estimated by Ide and Beroza (2001) for a wide M0 range. The insert illustrates the relation between ES/M0 and ML. On average, ES/M0 = 5.3 × 10−6, 6.3 × 10−5, and 2.7 × 10−4 for 2.5 < ML < 3.5, 3.5 < ML < 4.5, and ML > 4.5, respectively. This reveals that the Orowan stress drops are approximately 3, 40, and 160 bar for different ML range, respectively
In theory, the difference in Es/M0 between ML < 4.0 and ML > 4.0 events might be interpreted in a simple stress-drop model (cf. Kanamori and Heaton 2000). Following Kanamori and Heaton (2000), the Es/M0 ratio is proportional to (1 − Dc/D), where Dc is the critical distance and D is the total slip on the fault plane. For small earthquakes, Dc is comparable with D to have a large Dc/D, resulting in a low Es/M0 ratio; by contrast, for large earthquakes, there is a small Dc/D due to the fact that frictional melting or fluid pressurization is likely to occur during an earthquake rupture. Then, it would have a high ES/M0. In other words, for a given M0, a high Dc/D has less ES released; reversely, a low Dc/D has more Es released. In fact, the value of Dc is not apt to be observed, especially for small earthquakes. The discrepancy in ES/M0 shows different rupture dynamics for small and large earthquakes.
4.3 M0 versus ML and MW versus ML
Both M0 and ML represent the earthquake size. Therefore, logM0 should scale as ML. That is, logM0 increases with increasing ML. Figure 6A illustrates logM0 varying with ML for the Shoufeng earthquake sequence. Another scale denoting earthquake size is the moment magnitude (MW), defined as MW = (2/3)logM0 − 6.07 (M0 in Nm; Kanamori 1977; Hanks and Kanamori 1979). Figure 6B displays the relationship between MW and ML. MW is generally smaller than ML, as noted by Wu et al. (2005). Because the M0–ML and MW–ML relations are two sides of a single entity, some interpretations mainly depend on the MW–ML relation. From Fig. 6, a magnitude turning point can be detected at ML = 4.0. Subsequently, the MW–ML relation was determined as follows:

The plots of A M0 vs. ML and B MW vs. ML. Also shown are several moderate and large Taiwan earthquakes whose M0 and MW are from the U.S. Geological Survey (USGS). A crossover magnitude appears at ML = 4.0, which divides the M0–ML and MW–ML relations into two parts. The relations indicate that ML likely saturates for ML > 6.3
Equations (8) and (9) are dissimilar to the MW ∝ 1.25ML from Chen et al. (2009) for ML > 3.5 earthquakes in Taiwan. However, Wu et al. (2005) obtained MW ∝ ML and concluded that ML is, on average, approximately 0.2 units larger than MW for ML > 4.5 earthquakes. This is comparable with Eq. (9), in which ML is 0.5 units larger than Mw. In addition, two studies of Taiwan’s earthquakes with ML > 4.5 expressed the M0–ML relations as logM0 ∝ 1.6ML (Wang et al. 1989) and logM0 ∝ 1.27ML (Chen et al. 2007), corresponding to MW ∝ 1.07ML and MW ∝ 0.85ML. One other study using finite-fault inversion for ML > 5 earthquakes in Taiwan reported logM0 ∝ 1.6ML, that is, MW ∝ 1.07ML (Wu 2000). The MW–ML relations from Wang et al. (1989) and Wu (2000) are similar to Eq. (9). However, using all information, we obtained Mw ∝ 0.82·ML, similar to Chen et al.’s result (Chen et al. 2007) when ignoring the magnitude turning point as addressed in Eqs. (8) and (9). Additionally, a remarkable feature in Fig. 6(A) is that the derived M0–ML relation could not predict the M0 for ML > 6.3 events. This indicates ML saturation beyond ML 6.3.
The MW–ML relation from this study is consistent with that from Malagnini and Munafò (2018), which analyzed the earthquakes of the central and northern Apennines and noted a crossover magnitude at approximately ML = 4.3 for the MW–ML relation. Their results proposed that Mw ∝ 0.67ML for ML < 4.3 and MW ∝ 1.28ML for ML > 4.3. For small earthquakes (below ~ ML 4.0), Mw scaled as 0.67ML, in agreement with Munafò et al. (2016) and our results. By contrast, for larger earthquakes, the results from this study differed from those of Malagnini and Munafò (2018). Munafò et al. (2016) proposed an invariant source duration to interpret MW ∝ 0.67ML for ML < 4.0. Here, we attempted inferring what condition is valid for the derived MW–ML relation. Starting with a simple idea, we assumed an isosceles triangle source time function (moment rate function) with the maximum amplitude A and duration T (also refer to Deichmann 2018b). The integral (area) of the source time function denotes M0; then, M0 ∝ AT; that is, logM0 ∝ logA + logT. Here, two scenarios are considered. First, let M0 ∝ T3, then logM0 ∝ 3logT or logT ∝ (1/3)logM0. These relations result in logM0 ∝ (3/2)logA. Following the definition of ML (Richter 1935), ML is proportional to logA; then, logM0 ∝ (3/2)ML. Finally, ML ∝ MW. Subsequently, if T is assumed to be independent of M0, logM0 will scale as logA, leading to logM0 ∝ ML. Finally, ML ∝ (2/3)MW is obtained. Conversely, if ML ∝ MW is observed, it implies that M0 ∝ T3; if ML ∝ (2/3)MW is obtained, it implies that T is invariant.
As a rule, the M0 ∝ T3 relation is based on the source self-similarity, in which the static stress drop (Δσ) is not related to M0 (cf. Aki 1967; Kanamori and Rivera 2004). Kanamori and Rivera (2004) proposed that the M0 ∝ T3 relation may not necessarily obey the source self-similarity. Another possibility for M0 ∝ T3 is under the condition that ΔσVr3 = constant, where Vr is the rupture velocity (Kanamori and Rivera 2004; Hwang et al. 2020). That is, both source self-similarity and ΔσVr3 = constant can make M0 ∝ T3 hold. Of course, to verify this, it is necessary to probe into how T varies with M0 from observations.
5 Conclusions
By systemically analyzing the source parameters for the 2021 Shoufeng earthquake sequence, we obtained several regression relations among these parameters, including the ES–ML, ES–M0, M0–ML, and MW–ML relations. A crossover magnitude, detected at ML = 4.0, divided the M0–ML and MW–ML relations into two parts, but logES was still proportional to 2.0ML for 2.5 < ML < 6.3. Such results indicated variation between source duration and M0 for the 2021 Shoufeng earthquake sequence. On average, a relatively large ES/M0 ratio and high Orowan stress drop were present for ML > 4.5 events. That is, the stress state at the source area exhibited variation with earthquake size.
References
Abercrombie RE (1995) Earthquake source scaling relationships from −1 to 5 ML using seismograms recorded at 2.5-km depth. J Geophys Res 100:24015–24036
Aki K (1967) Scaling law of seismic spectrum. J Geophys Res 72:1217–1231
Aki K, Richards PG (2002) Quantitative seismolog. University Science Books, Sausalito
Andrews DJ (1986) Objective determination of source parameters and similarity of earthquakes of different size. In: Das S, Boatwright J, Scholz CH (eds) Earthquake source mechanics. Am Geophys Union, Washington DC, pp 259–267
Bethmann F, Deichmann N, Mai PM (2011) Scaling relations of local magnitude versus moment magnitude for sequences of similar earthquakes in Switzerland. Bull Seismol Soc Am 101:515–534
Boatwright J, Choy GL (1986) Teleseismic estimates of the energy radiated by shallow earthquakes. J Geophys Res 91:2095–2112
Boatwright J, Fletcher JB (1984) The partition of radiated energy between P and S waves. Bull Seismol Soc Am 74:361–376
Brune JN (1970) Tectonic stress and the spectra of seismic shear waves from earthquakes. J Geophys Res 75:4997–5009
Chan JB, Hwang RD, Lin CY, Lin CY (2020) Relationship between Richter magnitude (ML) and radiated seismic energy (MS) for the 2019/04/18 ML 6.3 Xiulin (Hualien) earthquake sequence. In: Presented in 2020 Annu. congress of Chinese Geophysical Society and Geological Society of Taiwan, Taipei, Taiwan. (in Chinese)
Chan JB, Hwang RD, Lin CY, Lin CY (2021) Investigating the relationship between source duration and seismic moment for the 2019 Xiulin (Hualien) earthquake sequence. In: Presented in 2021 Annu. congress of Chinese Geophysical Society and Geological Society of Taiwan, Taipei, Taiwan. (in Chinese)
Chen KC, Huang WG, Wang JH (2007) Relationships among magnitudes and seismic moment of earthquakes in the Taiwan region. Terr Atmos Ocean Sci 18:951–973
Chen RY, Kao H, Liang WT, Shin TC, Tsai YB, Huang BS (2009) Three-dimensional patterns of seismic deformation in the Taiwan region with special implication from the 1999 Chi–Chi earthquake sequence. Tectonophysics 466:140–151
Deichmann N (2006) Local magnitude, a moment revisited. Bull Seismol Soc Am 96:1267–1277
Deichmann N (2017) Theoretical basis for the observed break in ML/MW scaling between small and large earthquakes. Bull Seismol Soc Am 107:505–520
Deichmann N (2018a) Why does ML scale 1:1 with 0.5logES? Seismol Res Lett 89:2249–2255
Deichmann N (2018b) The relation between ME, ML and MW in theory and numerical simulations for small to moderate earthquakes. J Seismol 22:1645–1668
Di Bona M, Rovelli A (1988) Effects of the bandwidth limitation on stress drops estimated from integrals of the ground motion. Bull Seismol Soc Am 78:1818–1825
Dineva S, Mereu R (2009) Energy magnitude: a case study for southern Ontario/western Quebec (Canada). Seismol Res Lett 80:136–148
Grünthal G, Wahlstrom R, Stromeyer D (2009) The unified catalogue of earthquakes in central, northern, and northwestern Europe (CENEC)—updated and expanded to the last millennium. J Seismol 13:517–541
Gutenberg B, Richter CF (1956) Earthquake magnitude, intensity, energy, and acceleration. Bull Seismol Soc Am 46:105–145
Hanks TC, Kanamori H (1979) A moment magnitude scale. J Geophys Res 84:2348–2350
Houston H (1990) A comparison of broadband source spectra, seismic energies, and stress drops of the 1989 Loma Prieta and 1988 Armenian earthquakes. Geophys Res Lett 17:1413–1416
Huang BS (2003) The determination of local energy magnitude based on the regional broadband seismic data of Taiwan area (II). Central Weather Bureau, MOTC, MOTC-CWB-92-E-07. (in Chinese)
Hwang RD (2012) Estimating the radiated seismic energy of the 2010 ML 6.4 JiaSian, Taiwan, earthquake using multiple-event analysis. Terr Atmos Ocean Sci 23:459–465
Hwang RD, Lin CY, Lin CY, Chang WY, Lin TW, Huang YL, Chang JP (2019) Multiple-event analysis of the 2018 ML 6.2 Hualien earthquake from source time functions. Terr Atmos Ocean Sci 30:367–376
Hwang RD, Ho CY, Chang WY, Lin TW, Huang YL, Lin CY, Lin CY (2020) Relationship between seismic moment and source duration for seismogenic earthquakes in Taiwan: implications for the product of static stress drop and the cube of rupture velocity. Pure Appl Geophys 177:3191–3203
Hwang RD Huang YL Chang WY Lin CY Lin CY (2022) Rupture directivity of the 2019 ML 6.3 Xiulin (Hualien) earthquake estimated by near-field seismograms: implications for source scaling during faulting. (in preparation)
Ide S, Beroza GC (2001) Does apparent stress vary with earthquake size? Geophys Res Lett 28:3349–3352
Institute of Earth Sciences Academia Sinica Taiwan (1996) Broadband array in Taiwan for seismology. Institute of Earth Sciences, Academia Sinica, Taiwan. Other/Seismic Network. https://doi.org/10.7914/SN/TW
IRIS DMC (2013) Data services products: EQEnergy Earthquake energy & rupture duration. https://doi.org/10.17611/DP/EQE.1
Kanamori H (1977) The energy release in great earthquakes. J Geophys Res 82:2981–2987
Kanamori H (1990) Pasadena very-broad-band system and its use for real-time seismology, extended abstract for the US-Japan seminar on earthquake prediction, Morro Bay, California, 12–15 September, 1988, U. S. Geol. Surv. Open-File Rept. pp 90–98
Kanamori H (2001) Energy budget of earthquakes and seismic efficiency. Earthquake thermodynamics and phase transformations in the earth’s interior, vol 76. International geophysics series. Academic Press, San Diego, pp 293–305
Kanamori H, Anderson DL (1975) Theoretical basis of some empirical relations in seismology. Bull Seismol Soc Am 65:1073–1095
Kanamori H, Heaton TH (2000) Microscopic and macroscopic physics of earthquakes. In: Rundle JB et al (eds) Geocomplexity and the physics of earthquakes. Geophysical monograph series. Am Geophys Union, Washington, DC, pp 147–163
Kanamori H, Rivera L (2004) Static and dynamic scaling relations for earthquakes and their implications for rupture speed and stress drop. Bull Seismol Soc Am 94:314–319
Kanamori H, Mori J, Hauksson E, Heaton TH, Hutton LK, Jones LM (1993) Determination of earthquake energy release and ML using Terrascope. Bull Seismol Soc Am 83:330–346
Kao H, Jian PR, Ma KF, Huang BS, Liu CC (1998) Moment-tensor inversion for offshore earthquakes east of Taiwan and their implications to regional collision. Geophys Res Lett 25:3619–3622
Lee SJ, Wong TP, Liu TY, Lin TC, Chen CT (2020) Strong ground motion over a large area in northern Taiwan caused by the northward rupture directivity of the 2019 Hualien earthquake. J Asian Earth Sci 192:104095
Malagnini L, Munafò I (2018) On the Relationship between ML and Mw in a broad range: an example from the Apennines, Italy. Bull Seismol Soc Am 108:1018–1024
Margaris BN, Papazachos CB (1999) Moment-magnitude relations based on strong motion records in Greece. Bull Seismol Soc Am 89:442–455
Mayeda K, Walter WR (1996) Moment, energy, stress drop, and source spectra of western United States earthquakes from regional coda envelopes. J Geophys Res 101:11195–11208
McGarr A (1999) On relating apparent stress to the stress causing earthquake fault slip. J Geophys Res 104:3003–3011
Mereu RF (2020) A study of the relations between ML, Me, Mw, apparent stress, and fault aspect ratio. Phys Earth Planet Inter 298:106278
Munafò I, Malagnini L, Chiaraluce L (2016) On the relationship between Mw and ML for small earthquakes. Bull Seismol Soc Am 106:2402–2408
Newman AV, Okal EA (1998) Teleseismic estimates of radiated seis-mic energy: the E/M0 discriminant for tsunami earthquakes. J Geophys Res 103:26885–26898
Okal EA (1992) A student’s guide to teleseismic body wave amplitudes. Seismol Res Lett 63:169–180
Orowan E (1960) Mechanism of seismic faulting. Geol Soc Am Mere 79:323–345
Randall MJ (1973) The spectral theory of seismic sources. Bull Seismol Soc Am 63:1133–1144
Rau RJ, Tseng TL (2019) Introduction to the special issue on the 2018 Hualien, Taiwan, earthquake. Terr Atmos Ocean Sci 30:281–283
Richter CF (1935) An instrument earthquake magnitude scale. Bull Seismol Soc Am 25:1–32
Sargeant S, Ottemöller L (2009) Lg wave attenuation in Britain. Geophys J Int 179:1593–1606
Seidl D, Berckhemer H (1982) Determination of source moment and radiated seismic energy from broadband recordings. Phys Earth Planet Inter 30:209–213
Shearer PM (2009) Introduction to seismology. Cambridge University Press, Cambridge
Thatcher W, Hanks T (1973) Source parameters of southern California earthquakes. J Geophys Res 78:8547–8576
Venkataraman A, Kanamori H (2004) Observational constraints on the fracture energy of subduction zone earthquakes. J Geophys Res 109:B05302. https://doi.org/10.1029/2003JB002549
Venkataraman A, Beroza GC, Boatwright J (2006) A brief review of techniques used to estimate radiated seismic energy. Earthquakes: radiated energy and the physics of faulting, vol 170. Geophysical monograph series. American Geophysical Union, Washington, DC, pp 15–24
Wang JH (2004) The seismic efficiency of the 1999 Chi–Chi, Taiwan, earthquake. Geophys Res Lett 31:L10613. https://doi.org/10.1029/2004GL019417
Wang JH, Liu CC, Tsai YB (1989) Local magnitude determined from a simulated Wood–Anderson seismograph. Tectonophysics 166:15–26
Wu HI (2000) Source analysis of moderate to large earthquake in Taiwan. M.S. Dissertation, National Central University
Wu YM, Allen RM, Wu CF (2005) Revised ML determination for crustal earthquakes in Taiwan. Bull Seismol Soc Am 95:2517–2524
Zollo A, Orefice A, Convertito V (2014) Source parameter scaling and radiation efficiency of microearthquakes along the Irpinia fault zone in southern Apennines, Italy. J Geophys Res 119:3256–3275
Acknowledgements
We thank the IES for providing the BATS seismic data and the CWB for permitting the use of their earthquake catalog. The National Science Council of Taiwan financially supported this study under Grant No. MOST110-2116-M-034-004.
Author information
Authors and Affiliations
Contributions
R-DH designed the method for analyses, drafted the manuscript, and performed the finalized version of the manuscript. Y-LH revised the manuscript and drafted the part of the manuscript. W-YC revised the manuscript. C-YL and C-YL collected and analyzed data, and drew all figures. S-TW and J-BC assisted in analyzing data. J-PC and T-WL contributed to discussion and revision. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
In the \(\omega^{ - 2}\) source model and assuming that the Q is not related to frequency, the observed acceleration spectrum (\(A_{s}\)) can be expressed as follows:
where \(f\) denotes the frequency; \(\Omega_{0}\) is the spectrum at the low-frequency part, which is proportional to the seismic moment (\(M_{0}\)); \(f_{c}\) is the corner frequency; \(t^{*}\) is the attenuation operator, defined as \(t/Q\), where \(t\) is the travel time from source to receiver, and \(Q\) is a dimensionless quantity (also called the Q-factor), which indicates the fractional energy per cycle (cf. Shearer 2009). When \(f \gg f_{c}\), then \(\left( {\frac{f}{{f_{c} }}} \right)^{2} \gg 1\), Eq. (10) approximates the following.
When taking the natural log of Eq. (11), we have
For the high-frequency part, there is a linear relationship between \(\ln A_{s} \left( f \right)\) and \(f\). Through the least-squares regression, the optimal slope is \(-\pi t^{*}\), leading to obtain \(t^{*}\). In this study, we resampled the acceleration P-wave, provided by the BATS DMC (IES 1996), to a rate of 0.01 s. Figure

Calculation of t* for P-waves by using acceleration recordings. Two examples of the t* estimations from two aftershocks, 20100421 ML 4.05 and 20210501 ML 3.79 events, are displayed
7 displays the estimation of \(t^{*}\) from two aftershocks. Here, we used 17 aftershocks to estimate \(t^{*}\), observed at each station, i.e., from source to station. Finally, we calculated the average \(t^{*}\) from all stations. The average \(t^{*}\) derived in this study is 0.029, which is similar to the t* = 0.03 of Chan et al. (2020).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hwang, RD., Huang, YL., Chang, WY. et al. Radiated seismic energy from the 2021 ML 5.8 and ML 6.2 Shoufeng (Hualien), Taiwan, earthquakes and their aftershocks. TAO 33, 19 (2022). https://doi.org/10.1007/s44195-022-00020-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44195-022-00020-4