
Abstract
In the earthquake-resistant design of overhead tanks, this research dealt with the determination of the response reduction factor applicable to overhead water tanks performing beyond the elastic limit. Eight existing water tanks were selected for the investigation and 127 ground accelerations due to 10 Indian earthquakes were selected. The magnitude of the earthquakes selected ranges from 4.5 to 7.2. Initially, 10.16 million nonlinear dynamic data of response reduction factor had been produced using Newmark’s β method by varying parameters. From the results obtained, multi-linear regression analysis was made to arrive at the empirical formula relating the parameters and it was found that ductility factor was the most significant factor among others such as damping ratio, pre-post stiffness ratio, natural period, and soil types, in influencing response reduction factor. Eventually, It is concluded that the values of the response reduction factor to be adopted in the dynamic analysis of Overhead water tanks should be based on the desired value of the ductility factor.
Article highlights
-
Response reduction factor that is relevant for above-ground water tanks operating over the elastic limit.
-
Development of empirical formula based on multilinear regression model.
-
Effect of ductility factor on dymnamic behaviour of overhead water tanks.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
It is well known that the base shear induced in any structure due to a ground acceleration is given by \(V_{b} = \left( \frac{A}{g} \right)w\), wherethe parameters ‘A’ and ‘w’ are the peak value of pseudo-spectral acceleration and seismic weight of a particular structure subjected to any ground acceleration, respectively. Moreover, ‘A/g’ may be inferred as lateral force or base shear coefficients. However, buildings are designed for base shear lesser than the base shear corresponding to the strongest ground shaking that may occur at that particular location and period.. Figure 1 shows the base shear coefficient from the elastic response spectrum of Indian standard IS1893 (part 1): 2016 [1] and its reduced base shear coefficient by the structures during strong ground excitation, as this is within the limits. Thus, earthquake engineers will ensure desirable values of response reduction factors are obtained for various types of structures so that damages caused will be kept within the acceptable limit. As seen in Fig. 2a, b, the elastoplastic approximation to the true force–deformation curve is drawn so that the regions beneath the two curves are equal at the value chosen for the maximum displacement um. This idealized system in Fig. 2 is linearly elastic with stiffness k upon initial loading, provided that the force is smaller than fy, but yielding only starts when the force reaches the yield strength, fy. Similarly, the yield deformation, uy, is the deformation at which yielding starts. At constant force fy, yielding occurs (i.e., the stiffness is equal to zero)\(,\; u_{m } \;{\text{is}}\,{\text{the}}\;{\text{ultimate}}\,{\text{displacement}},{ } f_{o } \,{\text{and}}\; u_{o} \;{\text{are}}\) the maximum value of the resisting force and displacement in the corresponding linear system, respectively. Also, Fig. 2b shows that the normalized yield strength (\(\overline{{f_{y} }}\)) is equal to \(\frac{{f_{y} }}{{f_{o } }} or\frac{{u_{y} }}{{u_{o} }}\) and the response reduction factor is the reciprocal of the \(\overline{{f_{y} }}\). The normalization of um relative to the yield displacement is called ductility factor, i.e., μ = \(\frac{{u_{m} }}{{u_{y} }}\) [3] and the relationship between the ductility factor and the reduction factor is given by:

Design elastic response spectra for rock stratum for Indian earthquakes

Force–deformation relationship
Generally, as known, the performance of a structure that undergoes deformation beyond the elastic limit is very complex to define. This is mainly because the earthquake response of an elastic system varies with respect to the damping ratio (ς) and natural period (Tn). In contrast, that of an inelastic system is influenced by important factors such as ductility factor (μ), pre-post stiffness ratio (α) in addition to the factors mentioned above [3,4,5].
Overhead water tanks (OWT) are very important structures for storing drinking water and chemicals in industrial plants. There are two main types of elevated water tanks, namely framed and shell tubular water tanks, depending on the type of staging adopted. So, water tanks are to be able to function beyond earthquake occurrence. As water will be needed after the earthquake occurrence, earthquake engineers have to ensure proper functionality of tanks post-earthquakes. If not, it paves the way to immeasurable problems. The frame staging for OWTs is a special moment resisting frame (SMRF), designed for high-seismic-risk areas like hospitals and emergency response facilities to maintain integrity under severe earthquake loads.. In this research, the focus is on framed tanks. Overhead water tanks are highly vulnerable to lateral load due to an earthquake, since the higher weight is concentrated on the roof level,, leading to a high overturning moment.
During an earthquake, the OWTs will be subjected to two types of motion. The first is the movement of the whole tank with respect to ground level, and the second is the movement of water stored in the container, mainly the lower portion, with respect to base slab and wall. These motions caused by the dynamic forces in structural as well as non-structural elements of water tanks and improper design lead to the collapse of the structure. Indian Institute of Technology, Kanpur- Gujarat State Disaster Management Act (IITK-GSDMA)has guidelines for the seismic analysis of overhead water tanks, which is based on the American Concrete Institute code [6, 7].
The dynamic responses of the OWTs due to ground accelerations may be linear or nonlinear based on their peak ground acceleration (PGA). The response reduction factor is the factor by which the actual base shear force, which would be generated if the structure remained elastic during its response to the Design Base Earthquake (DBE) shaking, shall be reduced to obtain the design lateral force.
A simplified procedure for dynamic analysis of OWTs was introduced by Housner [8], which usedhydrodynamic pressure as impulsive as well as convective hydrodynamic pressure in addition to hydrostatic pressure. A further study by Pouyan et al. [9] lead to the determination of the natural frequencies of OWTs using a new analytical method based on the configuration of the equivalent mass-spring model. In their study, i found that the influence of fluid-structure-soil interaction on the natural period is significant for soft soil.
Seismic response factors were established by Ghateh et al. [10] for tanks ranging from small to very large . Their study provided Pushover curves for forty-eight prototypes. It was found that tank size, out of the various factors considered, is the predominant factor influencing the seismic response factors of water tanks. A seismic assessment of heritage-listed two EWTs was done by Claudia et al. [11], one is taller, and the other one is shorter with shaft staging. It was shown that the taller one suffered a numerical collapse; meanwhile, tensile stress beyond the allowable limit took place in the large space of the shorter one.
Eleni and Michael [12] studied the performances of elastic and inelastic structures with viscous damping systems to soft-soil and near-field ground excitation. Their study obtained the ductilityy demand of the singledegree of freedom systems and three-story framed structures with and without providing linear and nonlinear viscous damping device, which were studie,d and the results were compared with the conventional buildings.
Similarly, lateral displacement ductility demands of a nonlinear single degree of freedom system (SDOF) using smooth (i.e., design) elastic response spectra due to an ensemble of ground accelerations as well as the response spectrum of individual ground acceleration were investigated by Farrow and Kurama [13]. Their study, comparing the results,concluded that displacement ductility demand obtained by individual ground excitation provides unconservative results mainly for near-fault, soft soil, and survival level conditions. George and Dimitri [14] computed the maximum inelastic displacement of the SDOF system from the corresponding maximum elastic displacement using the knowledge of the inelastic displacement ratio. Extensive studies were carried out using an effective and sophisticated method to determine the inelastic displacement ratio in terms of viscous damping ratio, the period of vibration, force reduction factor, the strain-hardening ratio, and soil types. . They found that repeated earthquakes or multiple earthquakes influenced the inelastic displacement ratio significantly.
A vast study on the effects of repeated or multiple earthquakes was also made by Sarno [15] on reinforced concrete structures. The same set of ground excitation was used to construct the response spectra. The earthquake performances of the concrete structures from the spectra of inelastic response aed that extensive and imperative studies have to be performed for multiple earthquakes. Borzi et al. [16] recognized that displacement-based seismic design is a potentially lucid approach compared to the forced-based practices. A well-controlled ground excitation due to an earthquake was considered to construct the inelastic displacement response spectra. The response reduction factors of displacement and the relationship between ductility and damping were derived from the spectra constructed.
Luis et al. [17] established the displacement demand, regarding soil type, source-to-site distance, and magnitude, of SDOF systems from the elastic and inelastic displacement response spectra of an ensemble of ground accelerations due to various earthquakes. he relationship between the inelastic displacement ratio made with soil condition, displacement ductility, and period of vibration had been proposed. Karakostas et al. [18] constructed elastic response spectra of displacement, velocity, and acceleration and inelastic response spectra of strength and displacement of a set of ground acceleration records from Greece, had been constructed for various critical damping ratio and ductility levels. Subsequently, strength modification factors were proposed from the constant ductility response spectra using statistical analysis, and the corresponding empirical formula was suggested.
George [19] studied the ductility demand spectra of multiple near and far fault earthquakes for SDOF systems considering seismic sequence effects. The artificial sequence was considered because of the lack of availability of seismic sequence records. To express the ductility demand in the function of the period of vibration, pre-post stiffness ratio, viscous damping, and the force reduction factor, a 120 million dynamic inelastic analysis was conducted. Finally, it was found that considering only design response spectra is insufficient in estimating ductility demand and leads to an underestimation of structural damages. Tong and Zhao [20] analyzed inelastic SDOF systems for the modified-Clough hysteretic model with stiffness degradation. Their study considered 370 earthquake records from four different sites and the seismic force modification factor and elastic strength design coefficient were suggested. An empirical formulae were proposed for mean and 90% probability response spectra, which were found to be following the statistically obtained curves. Performance-based design is an alternative method for designing and rehabilitating buildings, but some codes do not supportit. AbdelMalek et al.[21] optimized reinforced concrete case studies according to the Egyptian code of practice and evaluated them using two seismic hazard levels. Their study showed the benefits of implementing performance-based design procedures [21]. Cinitha et al. [22] explore the seismic performance and vulnerability analyses of code-compliant reinforced concrete (RC) structures with four and six stories, respectively, that were created for two distinct scenarios. The building's overall response to seismic excitations and the elements' initial yielding and increasing plastic behavour are captured via pushover analysis. The performance levels were expressed using the Target displacement, life safety, and collapse prevention express performance levels [22]. A system for determining the degree of damage to an existing structure caused by seismic activity is presented by Ait L'Hadj et al.[23].
The capacity curve is obtained using structural finite element software and nonlinear static equivalent analysis. According to the suggested method, the examined structure belongs to the third domain, which depicts a critical damage condition [24, 25]. According to Lee and Lee [26] 's research, the material's nonlinearity and directionality have a substantial impact on how an earthquake-damaged concrete rectangular liquid storage tank responds to ground motion in three directions. The base shear and overturning moment could be impacted by the reduction in hydrodynamic pressure while the relative displacement of the structure increased [24, 25]. Also, the directionality significantly impacted the sloshing height's peak value [26]. However, with the help of numerous retrofitting techniques, Nayak and Thakare[27] hope to build a systematic investigative metrology for condition rating procedures based on AHP. The condition index of an elevated water tank that already exists are calculated using NDTs and SAP 2000 analysis, and the tank was developed following the IS code. To increase drift and flexural capacity, retrofitting techniques were used [27]. In an attempt to address shortcomings and poor judgment in the study and design phases, Anjum et al. [28] recommended that elevated water storage tanks should continue to be operational both during and after a seismic event. The key design components are the selection of the staging system and the engineering demand parameters [28]. The response reduction/modification factor (R) of four existing RC staging elevated water tanks built following draught Indian regulations was determined by Patel and Amin [29] The outcomes demonstrated that the R factor, period, and overall performance of the water tank were significantly influenced by the flexibility of the supporting soil. Each water tank was created with a larger safety margin than what Indian Standards required [29]. The behaviour coefficient is a parameter introduced in dimensioning codes for internal force calculation and inelastic deformation prediction. The impact of many variables, such as pedestal height, ductility, soil type, and seismic zone, on the behaviour of raised tanks, was evaluated by Ider et al. [30].
The behaviour coefficient of increased RC elevated tanks can be evaluated using a more realistic law [30]. To increase the seismic resistance capability of both existing and newly built elevated water tanks, Kangda et al.[31] explored the analytical efficacy of pall friction dampers. They employs finite element software to develop a finite element model and assesses the performance of three water tanks based on their capacities. Findings from their study indicated that the damper's efficiency is independent of tank capacities and declines as staging height rises [31]. Masoudi et al. [32] examined seismic behaviour, shaft and frame staging, and elevated concrete tank collapse mechanisms. To calculate the tanks' response modification factors, or R, computer models have been developed. The impacts of multi-component earthquakes, fluid-structure interaction, and P- effects have all been researched on the inelastic response. However, a more logical modelling approach has been proposed [32].
Despite the various methodologies identified in the literature to determine the response reduction factor for an SDOF system the analytical and experimental researches are there in seismic analysis of overhead water tanks, however, the OWT’s inelastic performances influenced provided in the Indian earthquakes code are minimal. However, this research considering more factors such as ductility factor, pre-post stiffness ratio, damping ratio, natural period, and soil types, as a more robust technique to analsye perfromance of OWT. IITK-GSDMA, the guidelines for seismic design of elevated water tanks, has generally fixed the value of ‘R’ as 2.5 without taking into account the ductility factor and pre-post stiffness ratio. Therefore, this research intends to find out the reliable value of response reduction factors for the OWTs from the inelastic response spectra of Indian earthquakes.
The methodology used in this study is described in the following section. Section 3 introduces the Elevated Water Tank Spring-Mass Idealisation, which includes reinforced structural details for all components. Section 4 displays the Response Reduction Factor's Inelastic Response Spectra. Section 5 uses Multiple Regression Analysis to determine the empirical relationship between the response reduction factor and the other factors considered. Section 6 contains the Results and Discussion, which delves into the effect of various factors on the response reduction factor, and finally, section 7 presents the conclusions drawn from the study.
2 Methodology
The schematic representation of the steps taken in arriving at the response reduction factor for OWTs is depicted in Fig. 3. To do the investigation, 127 ground accelerations due to 10 Indian earthquakes have been collected from the strong motion centre, USGS [32]. They all occurred in two distinct geological strata: rock and soil. 56 and 71 ground accelerations are there in rock and soil stratum, respectively and Tables 1 and 2 delineates the ground motion characteristics of Indian earthquakes. Numerous variables, including magnitude, depth, distance from the epicenter, and local geological characteristics, might affect an earthquake's potential deep and varied impacts. The hypocentral distance, the earthquake's timing and location, and other factors all contribute to determining how severe the effect was. Larger magnitudes frequently cause more widespread damage to towns, infrastructure, and buildings. It is essential to comprehend factors such as ü (acceleration), u̇ (velocity), and u (displacement) to evaluate structural vulnerability and forecast the possible societal consequences of seismic occurrences. Eight numbers of tanks selected of various storage capacities, along with their various horizontal bracing configurations, are depicted in Figs 4, 5.

Procedure in arriving response reduction factor for overhead water tanks

Structural Frame details of Different Water Tanks

Horizontal bracing configurations of elevated water tanks
Initially, the values of ’R’ suggested by different codes in addition to IITK-GSDMA for different types of structures were studied. The various factors, namely pre-post stiffness ratio (α), ductility factor (μ), damping ratio (ς), natural period (Tn), and soil types, which influence the inelastic performances of water tanks were studied. Two values of (α), i.e., 0.0 (perfect elastoplastic system) and 0.1 are considered. Four values are considered for both (ς) and (μ) and they are 0.05, 0.1, 0.2, 0.3, and 2, 4, 6, 8 respectively. One of the numerical methods, called Newmark ‘β’ is adopted for the nonlinear dynamic analysis and the time interval taken is 0.02 sec up to the time duration of 50 sec. 10.16 million dynamic analysis had been done adding all the earthquakes.
3 Spring-mass idealization of elevated water tank
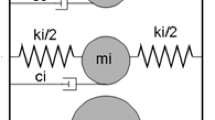
As known, an overhead water tank with water is idealized as the two degrees of freedom (DOF) system, namely impulsive mass and convective mass. The empty tank will not have a convective mode, i.e., the SDOF system. Modal analysis converts two degrees of freedom of filled tanks into two numbers of SDOF systems. It is depicted in Fig. 6.

Structural idealization of an overhead water tank
The lateral stiffness of tanks depends on the gravity loads and the number of vertical columns and horizontal bracings, and this is the reason why the stiffness of tank 4 is generally very high compared to other tanks, even though its gravity load is less. The convective mode's stiffness is less significant than that of the impulsive mode. The natural period of the convective mode of filled tanks ranges from 3 sec to 6 sec and that of impulsive mode and empty tank is around 1 to 1.5 sec. Eqns 2-3 are used to calculate the natural period of impulsive mode and convective mode. Wherein, Ks, Cc, and D are the lateral stiffness, coefficient of the convective period, and inside diameter of tanks respectively. Dynamic properties of OWTs [35] i.e., impulsive and convective masses are shown in Table 3. The schematic representation of the lateral stiffness of OWTs and natural periods of both modes are shown in Fig. 7a, b.
where Ww-Weight of water, Wc-Weight of empty container, Ws-Weight of staging, hcg*-Centre of gravity of empty container above the base slab, hi -Height of impulsive mass above the tank wall bottom without the base pressure, hi* -Height of impulsive mass above the base slab (considering base pressure), hc-Height of convective mass above the tank wall bottom without the base pressure, hc* -Height of convective mass above the base slab (considering base pressure). hs -Height of staging. hcg -Height of center of gravity of empty container measured from the top of the footing.

Dynamic properties of elevated water tanks
The container portion of tank 4 has been designed adopting the moment and shear coefficient given in IS 3370—Part IV [33] by the ‘Working Stress Method’ using M30 mix and Fe 415 steel for uncracked conditions. The structure has been analysed for wind zone for wind pressure of 1500 N/sq. m and for Seismic Zone II. The forces due to seismic effect are governing and the design has been done to take care of the seismic forces. The design of columns has been done by the ‘Limit State Method’ satisfying IS 456–2000 [34]. The braces have been designed by steel beam theory to take care of the reversal of stresses. All the dimensions of the structural components along with reinforcement detailing of tank 4 are delineated in Table 4 and Fig. 8.

Reinforcement detailing of some of the structural elements of Tank 4
4 Inelastic response spectra of response reduction factor
The average acceleration of Newmark ‘β’ method is selected, i.e., the values of γ and β are taken as \({\raise0.7ex\hbox{$1$} \!\mathord{\left/ {\vphantom {1 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}{\text{and}} {\raise0.7ex\hbox{$1$} \!\mathord{\left/ {\vphantom {1 4}}\right.\kern-0pt} \!\lower0.7ex\hbox{$4$}}\) respectively. Having fixed the values of variables, nonlinear dynamic analysis has been done using a software called ‘Prism’ [35]. For an inelastic system, the equation of motion to be solved numerically is given in Eq. 4. The function \(\widetilde{{f_{s} }}\left( {\mu ,\dot{\mu }} \right)\) represents the relationship between the force and displacement in terms of dimensionless forms, i.e., ductility factor and \({{\varsigma }} {\text{and}} \omega_{n}\) represent damping ratio and natural frequency respectively. Again \(\mu \left( t \right) = \frac{u\left( t \right)}{{u_{y} }}{\text{and}}\) \({\text{yield strength of tanks is given by}} a_{y} = \frac{{f_{y} }}{m}\), and \(\ddot{u}_{g} \left( t \right)\) denotes ground acceleration.
The ‘R’ values are varying with respect to each variable. The mean and standard deviation of R values against the natural period, for the fixed values of remaining variables, for each ground acceleration, have been calculated and added together to get 84. 1% probability. Results obtained from Prism software are given as input in regression analysis and the Empirical formula for ‘R’ has been obtained from multiple linear regression analysis by treating ς, Tn, α, and μ as independent variables for both types of soil stratum.
In Fig. 9, ductility factor is plotted against Tn. For linear system, ductility factor is always equal to unity, i.e., μ = 1, if =1. For the OWTs having the maximum values of natural periods, displacement sensitive region, um will be almost equal to uo, and hence from Equation (4), ductility factors will become response reduction factors. For the tanks having natural periods lying in the velocity-sensitive region, um may be higher or lower than uo, and hence their corresponding ductility factors will also be higher or lower than the response reduction factor. For the tanks in the acceleration-sensitive region, um is normally greater than uo, and the ratio um/uo increases with the decreasing values of Tn as well. Therefore, the ductility demand of tanks with very short Tns will be maximum.

Ductility demand for elastoplastic tank 1due to Gopeshwar ground motion; ζ = 5%,and \(\overline{{f_{y} }} = 1, 0.5, 0.25, {\text{and}} 0.125\)
The constant ductility response spectrum for each ground acceleration has been constructed for both types of soil conditions. Having calculated their mean and standard deviation of the response spectra, they are summed together in order to get an 84.1% probability design spectra.
4.1 Yield deformation and strength from inelastic response spectra
Provided the ground acceleration and structural dynamic properties, Tn and ζ, tanks' yield strength and deformation are calculated for the given ductility factor. Initially, \(\frac{{A_{y} }}{g}\) value is obtained from Fig. 10a or b and it is substituted in Eqs. (5) – (7).

a, b Constant ductility response spectrum for nonlinearly elasto-plastic tank 1 to Gopeshwar ground motion; μ = 1, 1.5, 2, 4, and 8; ζ = 5%
As an example, for tank 1 having Tn = 1 s, ζ = 0.05, and \(\mu = 4\), from Fig. 11a, \(\frac{{A_{y} }}{g} = 0.144\). \(\therefore f_{y} = 0.144 w\). From Eq. (6), \(u_{y} = \left( {\frac{1}{2\pi }} \right)^{2} *0.186*9.81 = 35.622\,{\text{mm}}\) and from Eq. (7),\(u_{m} = 4*\left( {\frac{1}{2\pi }} \right)^{2} *0.144*9.81 = 142.491\,{\text{mm}}.\)

Normalised yield strength \(\overline{{f_{y} }}\) of elastoplastic tank 1 based on natural time period Tn for \(\mu\) = 1,1.5, 2, 4, and 8; Gopeshwar ground motion
4.2 Relationship between ductility and yield strength
Figure 11 shows that the required yield strength of OWTs performing in the inelastic region is reduced for the increased value of the ductility factor. From Fig. 11, \(\mu = 1\) curve gives the minimum strength required for the tanks to remain elastic, i.e., \(\frac{{f_{0} }}{w}\) and other curves give the corresponding \(\frac{{f_{y} }}{w}\). For example, tank 1 with Tn = 1 gives \(\frac{{f_{0} }}{w} = 0.428\) and \(\frac{{f_{y} }}{w} = 0.144\) for \(\mu = 4\); the corresponding \(\overline{{f_{y} }} = 0.336\). \(\overline{{f_{y} }}\) values for other ductility values such as \(\mu = 1, 1.5, 2, {\text{and}} 8\) are obtained as 1, 0.695, 0.556, and 0.160 respectively. An OWT can be earthquake-resistant by making it strong or ductile by studying the above results. It is delineated again by considering tank 1 with Tn = 1 s and ζ = 5% subjected to Gopeshwar ground acceleration.
If tank 1 is designed for a strength \(f_{0} = 0.428w\), it will be in a linearly elastic region forever during this ground acceleration. Therefore, it is unnecessary to make it ductile. Meanwhile, if tank 1 is designed only for 16% of \(f_{0}\), the minimum strength required by tank 1 to remain in elastic region, it has to develop a ductility factor of 8. Instead, tank 1 can be designed for a yield strength equal to 55.6% of \(f_{0}\) and a ductility factor of 2; otherwise strength is equal to 33.6% of \(f_{0}\) and a ductility factor of 4. Sometimes, in the case of designing OWTs, achieving lateral strength will be easier compared to ensuring ductility, and sometimes, the condition may also be reversed. The combination of strength and ductility should be sufficient. Otherwise, it may lead to catastrophe of the tanks. The point to be kept in mind is that the strength reduction for a particular ductility factor mainly varies based on Tn. The response reduction factor calculated for tank 1 for various values of ductility factor is shown in Table 5.
5 Regression analysis
10.16 million Data generated from Prism software is imported into a statistics regression analysis software package to establish the empirical expression of ‘R’. It supports a wide range of analyses including linear and nonlinear regression analysis. It is mainly to sort out the analysis procedures easily, thus helping in the easy computation of the equation. Here multiple regression analysis is adopted. It refers to a technique for studying the straight-line relationship between two or more variables. The analysis considers two variables: Y and X, where Y is the dependent variable and X is the independent variable/variables. Y is taken to be the response reduction factor and X is taken as the time period (T), pre-post stiffness ratio (α), damping ratio (ς), and ductility factor (μ). The relationship between Y and X(s) is determined for both rock and soil geological conditions using multiple linear regression analysis in SPSS software. The assumed equation for the response reduction factor of the tank is given in Eqn. (8)
where a, b, c, and d are the coefficients of the period, pre-post stiffness ratio, damping ratio, and ductility factor respectively. The values of the coefficients a, b, c, and d estimated by multiple linear regression analysis in the software are found to be -0.001, 1.806, -1.274, 1.133 respectively for hard geology and -0.017, 3.729, -0.295, 1.086 for soil geology. The obtained values of the coefficients are substituted in the Eqn. (8). The Histogram and normal probability plot for both soil conditions are given in Figs. 12 and 13.

Histogram and normal probability plot of rock geology stratum

Histogram and normal probability plot of soil geology stratum
Equations (9) and (10) show the Response reduction factor for hard stratum \(({\text{R}}_{h} )\)) and soil stratum (\({\text{R}}_{s}\)) respectively. Tables A and B of the online Appendix show the ‘R’ values obtained for impulsive and convective modes of OWTs existing in various places for two different strata using multiple regression analysis.
6 Results and discussion
The design inelastic response spectra of ‘R’ constructed for Indian earthquakes have been depicted in Figs. 14 and 15. It is known from the Figs. 14 and 15, there is an abrupt undulation in the value of R for the initial natural periods, and as T increases, R becomes equal to the value of the ductility factor. It is also known that ‘R’ value gradually decreases when the damping ratio increases from 0 % to 30 %. There are less significant changes with respect to the force deformation relations, i.e., the pre-post stiffness ratio (α). When α is increased from 0.0 to 0.1, ‘R’ increases marginally. No significant changes were observed between the two geological conditions, namely rock and soil stratum.

Inelastic response spectra of response reduction factor for rock geology

Inelastic response spectra of response reduction factor for soil geology
The values of the response reduction factor of 8 tanks that have been determined using the multiple regression analysis by considering various parameters such as pre-post stiffness ratio, damping ratio, ductility factor, natural period, and geological condition delineate that the response reduction factors are highly dependent on the ductility factor. The response reduction factor increases with the increase in the ductility factor. The average of the reduction factor against each ductility factor is calculated and found to vary between 2 and 9. The graphical representation of the variation of response reduction factor with respect to period (T), pre-post stiffness ratio (α), damping ratio (ξ), and ductility factor (μ) have been illustrated in Fig. 16.


Variation of R with respect to T,α, ξ, μ for rock and soil geology
The graphs illustrate various details about the relationship between the response reduction factor (R) and the other variables. R gradually reduces in hard geology and steeply in soil geology with increasing natural period for particular values of other variables. The variation of ‘R’ w.r.t increasing pre-post stiffness ratio remains almost constant in both geological conditions. In the case of the relation between R and the damping ratio, the value of ‘R’ decreases gradually with an increase in the damping ratio. Abrupt changes are observed when it comes to the relationship between R and ductility factor.
The values of the response reduction factor increase steeply with increasing ductility values. Therefore, ductility plays a stellar role in determining the value of the response reduction factor. The project's main objective is to compare the values of the reduction factor with the codal provisions and check its accuracy. With regards to the same, the response reduction factor values obtained for OWTs subjected to ground accelerations due to Indian earthquakes through the regression analysis are compared with the codal provision IITK-GSDMA. The values of the response reduction factor determined through regression analysis are found to be within 2 for the ductility factor of 2 and increase to 9 while the ductility factor reaches 8.
The IITK-GSDMA guidelines recommend the value of R = 4 for the SMRF frame. Meanwhile, the latest Indian standard IS 1893 (part-II) 2016 recommends the value of R = 4 for Frame conforming to ductile detailing, i.e., special moment resisting frame (SMRF). However, This research shows that the response reduction factor is highly dependent on the ductility factor and also factors such as pre-post stiffness ratio, damping ratio, and natural time period. In the earthquake-prone regions with higher magnitudes of ground acceleration, it is required to provide higher ductility, and eventually higher reduction factor will be attained, which needs to increase the yield strength of the structure. The lowest value of ductility suggested would be 4 and the corresponding response reduction factor is around 4, which is similar to the response reduction factor recommended in the codal provisions for an overhead water tank. Hence, it is found that the values of the response reduction factor to be adopted in the dynamic analysis of OWTs should be based on the desired value of the ductility factor.
This research ultimately looks into the relationship between various factors and the seismic response reduction factor (R factor) and how seismic performance is affected in high-seismicity areas. The research focuses on the importance of ductility for seismic performance and how it interacts with other factors in high seismicity areas. The findings emphasize the significance of ductility for a structure's performance, particularly in seismically active areas. The research acknowledges that further exploration and evaluation are necessary to develop accurate and compelling suggestions for these domains. Researchers and practitioners developing seismic design strategies for high seismicity areas are encouraged to follow FEMA P695 [35], which provides a comprehensive framework for evaluating the seismic performance of structures.
To test tank displacements experimentally, it has been chosen to adopt two tanks, tank 1 and tank 2, that fully reflect the designs of full-scale buildings. The container and stage had set heights of 0.35 meters and 1.6 meters, respectively. The wall, base slab, and roof slab thicknesses were measured and found to be 2 mm, 3 mm, and 2 mm, respectively. The diameters of the steel rods that represented the tie beams and columns were chosen to be 8 mm and 10 mm, respectively. The horizontal bracing arrangements and storage capacities of the tanks vary from one another. The first and second tank's container diameters were set at 0.45 meters and 0.6 meters, respectively. The vertical bracing interval was determined to be 0.4 meters. At the base plate level, harmonic forced vibration is induced at a rate of two cycles per second. An Arduino Board with a microcontroller is the component of an accelerometer, a device that measures the motion of a structure along the three mutually perpendicular directions (x, y, and z). The acceleration response may be easily plotted in both numerical values and a graphical form in the computer system, and the load is delivered continuously for up to 15 seconds. The experimental setup is depicted in Fig. A of online Appendix. Table C of the online Appendix shows the readings of the roof displacement of the tanks, obtained by double-time integration of the acceleration values from the test conducted. Proportionate results have been obtained analytically as well as experimentally. While roof displacement decreases from tank 1 to tank 2, lateral stiffness increases from tank 1 to tank 2 because an additional number of columns and horizontal bracings are provided in tank 2.
7 Conclusion
This study focused on the influences of ductility factors on response reduction factors of overhead water tanks. The following conclusions were drawn from the study:
The study reveals a strong correlation between the ductility factor and the response reduction factor (R), with a substantial increase in R as the ductility factor increases. R shows a significant increase as the ductility factor rises, fluctuating between 2 and 9. For instance, R increases to 9 when the ductility factor reaches 8, demonstrating the quantitative influence of ductility on seismic response.
Also, geological conditions, such as the structure's location on rock or soil stratum, do not significantly affect the response reduction factor, suggesting that structural response is more dependent on ductility and damping. The pre-post stiffness ratio (α) has a marginal impact on the response reduction factor, with a slight increase in 'R' when α increases from 0.0 to 0.1. The damping ratio (ξ) affects the response reduction factor, with higher damping reducing the structure's response but not leading to abrupt changes in 'R.'
In addition, the research compares the response reduction factor values with codal provisions, such as IITK-GSDMA and IS 1893 (part-II) 2016, which recommend a fixed value of 4 for 'R' for overhead water tanks. However, the study suggests that 'R' should be based on the desired ductility factor, which is more variable and depends on various factors. In earthquake-prone regions with higher magnitudes of ground acceleration, it is essential to provide higher ductility in structures to ensure safety during seismic events. A minimum ductility factor of 4 should be considered to ensure structural safety, aligning with codal provisions for overhead water tanks.
Finally, this research investigates how ductility affects the seismic response reduction factor (R factor) in areas with a high seismic activity. The research emphasizes how crucial ductility is to seismic performance and how it interacts with other elements. It highlights the necessity of using a strong, FEMA P695-compliant methodology to identify suitable response reduction factors. Future studies should offer more detailed technical explanations for these variables, taking into account the distinctive characteristics of every region and the particular requirements of structures.
Data availability
The authors declare that the data supporting the findings of this study are available within the paper.
Code availability
Not applicable.
References
BIS (2002) Indian standard criteria for earthquake resistant design of structures, Part 1 — general provisions and buildings. In: Engineering, fifth Bureau of indian standards manak bhavan, 9 Bahadur Shah Zafar Marg, New Delhi, p 41
Indian Institute of Technology Kanpur, IITK-GSDMA (2007), Guidelines for seismic design of liquid storage tanks. ISBN 81–904190–4–8. Indian Standard, New Delhi.
Chopra, A. K. Dynamics of structures: theory and applications to earthquake engineering. Prentice-Hall International, London
Clough, R. W. & Penzien, J. (1993) Dynamics of structures, second. McGraw-Hill, 1993 - Dinámica de estructuras. ISBN-10. 0071132414.
Paz M, Leigh W. Dynamics of structures, theory and computation. Berlin: Springer; 2003.
Hanskat CS, Archibald JP, Bennett WN (2001). Seismic design of liquid-containing concretestructures: requirements for environmentalengineering concrete structures, ACI Committee, 350-38, USA (2001)
Housner GW. Dynamic pressures on accelerated fluidcontainers. Bull Seismol Soc Am. 1957;47(1):15–35.
Housner GW. The dynamic behavior of water tanks. Bull Seismol Soc Am. 1963;53:381–7.
Maedeh PA, Ghanbari A, Wu W. Estimation of elevated tanks natural period considering fluid-structure-soil interaction by using new approaches. J Earthq Struct. 2017;12:145–52.
Ghateh R, Kianoush MR, Pogorzelski W. Seismic response factors of reinforced concrete pedestal in elevated water tanks. Eng Struct. 2015;87:32–46. https://doi.org/10.1016/j.engstruct.2015.01.017.
Mori C, Sorace S, Terenzi G. Seismic assessment and retrofit of two heritage-listed R/C elevated water storage tanks. Soil Dyn Earthq Eng. 2015;77:123–36. https://doi.org/10.1016/j.soildyn.2015.05.007.
Pavlou EA, Constantinou MC. Response of elastic and inelastic structures with damping systems to near-field and soft-soil ground motions. Eng Struct. 2004;26:1217–30. https://doi.org/10.1016/j.engstruct.2004.04.001.
Farrow KT, Kurama YC. SDOF displacement ductility demands based on smooth ground motion response spectra. Eng Struct. 2004;26:1713–33. https://doi.org/10.1016/j.engstruct.2004.06.003.
Hatzigeorgiou GD, Beskos DE. Inelastic displacement ratios for SDOF structures subjected to repeated earthquakes. Eng Struct. 2009;31:2744–55. https://doi.org/10.1016/j.engstruct.2009.07.002.
Di Sarno L. Effects of multiple earthquakes on inelastic structural response. Eng Struct. 2013;56:673–81. https://doi.org/10.1016/j.engstruct.2013.05.041.
Borzi B, Calvi GM, Elnashai AS, et al. Inelastic spectra for displacement-based seismic design. Soil Dyn Earthq Eng. 2001;21:47–61. https://doi.org/10.1016/S0267-7261(00)00075-0.
Decanini LD, Liberatore L, Mollaioli F. Characterization of displacement demand for elastic and inelastic SDOF systems. Soil Dyn Earthq Eng. 2003;23:455–71. https://doi.org/10.1016/S0267-7261(03)00062-9.
Karakostas CZ, Athanassiadou CJ, Kappos AJ, Lekidis VA. Site-dependent design spectra and strength modification factors, based on records from Greece. Soil Dyn Earthq Eng. 2007;27:1012–27. https://doi.org/10.1016/j.soildyn.2007.03.002.
Hatzigeorgiou GD. Ductility demand spectra for multiple near- and far-fault earthquakes. Soil Dyn Earthq Eng. 2010;30:170–83. https://doi.org/10.1016/j.soildyn.2009.10.003.
Tong G, Zhao Y. Inelastic yielding strength demand coefficient spectra. Soil Dyn Earthq Eng. 2008;28:1004–13. https://doi.org/10.1016/j.soildyn.2007.11.004.
AbdelMalek H, Hassan TK, Moustafa A. Nonlinear time history analysis evaluation of optimized design for medium to high rise buildings using performance-based design. Ain Shams Eng J. 2023;14. https://doi.org/10.1016/j.asej.2022.102081.
Cinitha A, Umesha PK, Iyer N. Nonlinear static analysis to assess seismic performance and vulnerability of code-conforming RC buildings. WSEAS Trans Appl Theor Mech. 2012;7:39–48.
Ait LL, Hammoum H, Bouzelha K. Nonlinear analysis of a building surmounted by a reinforced concrete water tank under hydrostatic load. Adv Eng Softw. 2018;117:80–8. https://doi.org/10.1016/j.advengsoft.2017.04.005.
Divyah N., Prakash R., Srividhya S., et al (2023) Experimental and numerical investigations of laced built-up lightweight concrete encased columns subjected to cyclic axial load. Buildings 13
Arunachalam KP, Sukumaran M. Crack failure analysis of scaffolding frame intersection using ADINA. Mater Sci Res India. 2017;14:47–51.
Lee C-B, Lee J-H. Nonlinear dynamic response of a concrete rectangular liquid storage tank on rigid soil subjected to three-directional ground motion. Appl Sci. 2021. https://doi.org/10.3390/app11104688.
Nayak CB, Thakare SB. Seismic performance of existing water tank after condition ranking using non - destructive testing. Int J Adv Struct Eng. 2019;11:395–410. https://doi.org/10.1007/s40091-019-00241-x.
Anjum T, Zameeruddin M. Evaluation of efficacy of the elevated water tank under the seismic loads. Int J Civil Eng. 2021;8:20–6.
Patel KN, Amin JA. Performance-based assessment of response reduction factor of RC-elevated water tank considering soil flexibility: a case study. Int J Adv Struct Eng. 2018;10:233–47. https://doi.org/10.1007/s40091-018-0194-0.
Ider O, Hammoum H, Bouzelha K, Aliche A. Evaluation of the behaviour coefficient of an elevated RC tank. J Inst Eng Ser A. 2022;103:1–15. https://doi.org/10.1007/s40030-021-00615-z.
Kangda MZ, Bakre S, Kancharla H, Farsangi EN. Seismic performance upgrade of elevated water tanks utilizing friction dampersle. Practice Period Struct Des Construct. 2022. https://doi.org/10.1061/(ASCE)SC.1943-5576.0000720.
Masoudi M, Eshghi S, Ghafory-Ashtiany M. Evaluation of response modification factor (R) of elevated concrete tanks. Eng Struct. 2012;39:199–209. https://doi.org/10.1016/j.engstruct.2012.02.015.
IS: 3370, Code of practice concrete structures for storage of liquids (First Revision). (Bureau of Indian Standards, New Delhi, 2009)
IS 456, Indian standard code of practice for plain and Reinforced Concrete, (Bureau of Indian standards, New Delhi, 2000)
FEMA P-695. Quantification of building seismic performance factors. Washington, DC: Federal Emergency Management Agency; 2009.
Acknowledgement
The authors appreciate the support received from the Peruvian University of Applied Sciences - UPC for conducting this research.
Funding
No funding was received for conducting this study.
Author information
Authors and Affiliations
Contributions
AVPP – investigation, draft article writing, KPA - investigation, draft article writing, SA – supervision, analysis SSJ – Analysis, draft review, LMBR – Analysis, Draft review, POA – draft review, analysis.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Pandian, A.V.P., Arunachalam, K.P., Avudaiappan, S. et al. Modification of response reduction factors of overhead water tanks based on ductility factor. Discov Appl Sci 6, 192 (2024). https://doi.org/10.1007/s42452-024-05762-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-024-05762-z