
Abstract
Spectral indices based on unmanned aerial vehicle (UAV) multispectral images combined with machine learning algorithms can more effectively assess chlorophyll content in plants, which plays a crucial role in plant nutrition diagnosis, yield estimation and a better understanding of plant and environment interactions. Therefore, the aim of this study was to use UAV-based spectral indices deriving from UAV-based multispectral images as inputs in different machine learning models to predict canopy chlorophyll content of potato crops. The relative chlorophyll content was obtained using a SPAD chlorophyll meter. Random Forest (RF), support vector regression (SVR), partial least squares regression (PLSR) and ridge regression (RR) were employed to predict the chlorophyll content. The results showed that RF model was the best performing algorithm with an R2 of 0.76, Root Mean Square Error (RMSE) of 1.97. Both RF and SVR models showed much better accuracy than PLSR and RR models. This study suggests that the best models, RF model, allow to map the spatial variation in chlorophyll content of plant canopy using the UAV multispectral images at different growth stages.
Zusammenfassung
Multitemporale UAV-gestützte Kartierung des Chlorophyllgehalts in Kartoffelkulturen. Spektrale Indizes, die auf multispektralen Bildern von der Unmanned Aerial Vehicles (UAVs) basieren, können in Kombination mit Algorithmen des Maschinelles Lernen (ML) den Chlorophyllgehalt von Pflanzen effektiver bewerten. Dieser spielt eine entscheidende Rolle bei der Diagnose der Pflanzenernährung, der Ertragsschätzung und einem besseren Verständnis der Wechselwirkungen zwischen Pflanze und Umwelt. Ziel dieser Studie war es daher, UAV-basierte Spektralindizes, die aus UAV-basierten Multispektralbildern abgeleitet wurden, als Input für verschiedene ML-Modelle zu verwenden, um den Chlorophyllgehalt von Kartoffelpflanzen im Kronendach vorherzusagen. Der relative Chlorophyllgehalt wurde mit einem SPAD-Chlorophyllmessgerät ermittelt. Random Forest (RF), Support Vector Regression (SVR), Partial Least Squares Regression (PLSR) und Ridge Regression (RR) wurden zur Vorhersage des Chlorophyllgehalts eingesetzt. Die Ergebnisse zeigten, dass das RF-Modell mit einem R2 von 0,76 und einem Root Mean Square Error (RMSE) von 1,97 der beste Algorithmus war. Sowohl das RF- als auch das SVR-Modelle zeigten eine viel bessere Genauigkeit als die PLSR- und RR-Modelle. Diese Untersuchung deutet darauf hin, dass das beste Modell, das RF-Modell, es ermöglicht, die räumliche Variation des Chlorophyllgehalts in Pflanzendächern mit Hilfe von multispektralen UAV-Bildern in verschiedenen Wachstumsstadien abzubilden.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The chlorophylls are the most important pigment for photosynthesis (Gitelson et al. 1999; Singhal et al. 2019), which provides energy to the biosphere (Qi et al. 2021). Since the symptoms of plant response to stress and N deficiencies are often associated with plant chlorophyll content (Houles et al. 2007), timely determination of plant chlorophyll content can be important indicators of plant nutrient status and environmental effects, which is very useful for agricultural field management (Argenta et al. 2004).
Conventionally, the determination of chlorophyll content involves outdoor sampling and indoor chemical analysis. These methods are not only time-consuming and laborious, but also destructive and lagging. As a non-destructive technique, the portable chlorophyll meters (SPAD-502) have been widely used to estimate chlorophyll content in agricultural studies (Markwell et al. 1995; Martínez et al. 2004). However, the SPAD meter is a leaf-based measurement, and infeasible for large-scale regional monitoring (Uddling et al. 2007). Therefore, there is a need to develop the techniques to monitor plant chlorophyll content in real time on a regional scale.
In recent years, remote sensing technology allows to monitor plant chlorophyll content on a large regional scale (Yu et al. 2014). UAV-based multispectral imagery has been widely used to monitor the nutrient status in crops (Théau et al. 2020), e.g., chlorophyll content and N (Clevers et al. 2017; Verrelst et al. 2012). UAV image acquisition is not only fast, less consuming and flexible (Bendig et al. 2013), but also with higher spatial and temporal resolution than the satellite and aerial images to facilitate further image analysis (Bareth et al. 2015). Although satellite and aerial images are able to assess crop nutrient status on a large scale, such images possess the low spatial and temporal resolution. Rafael et al. (2014) have shown that there was difficulty of differentiating the content of chlorophyll in forest using multispectral satellite imagery. Over the past decades, however, the use of UAV images has rapidly narrowed the gap between satellite or aerial and ground-based sensing (Prado Osco et al. 2019).
However, the combination of remote sensing techniques with multispectral imagery requires more reliable assessment techniques due to the huge amount of data generated. Compared to individual spectral bands, spectral indices can be applied at different scales and mitigate to a certain extent the adverse effects due to anisotropic reflection, background shadows and soil brightness contributions (Inoue et al. 2012; Kooistra and Clevers 2016). For example, Qi et al. (2021) found NDVI and GNDVI had a much higher degree of fit and precision than the other indices. Tahir et al. (2018) found MSAVI2 and TNDVI were proved to be more robust indices to estimate the chlorophyll content in the orchard with the highest coefficients of determination (R2) 0.89 and 0.85, respectively. Although spectral indices can improve the robustness in predicting chlorophyll content to some degree, the saturation effect and multi-collinearity are still a problem for remotely estimating chlorophyll content in crops (Cao et al. 2017; Li et al. 2010).
Recently, machine learning algorithms have been induced in remote sensing (Wu et al. 2019; Lu et al. 2021). Support vector machine (SVM), random forests (RF), partial least squares regression (PLSR), ridge regularization (RR) are powerful tools to assist in UAV image computation. These algorithms performed well in current applications predicting plant conditions, such as N content (Colorado et al. 2020), chlorophyll content (Qi et al. 2021), and biomass (Vilijanen et al. 2018). Using spectral indices as input variables is a new approach, since these models ensure good performance in spite of only a few variables as input feature (Moghimi et al. 2020). Mutanga et al. (2012). found that predicting chlorophyll content using the RF algorithm and three NDVIs calculated from the red-edge and near-infrared bands produced low prediction errors. Shah et al. (2019) used the established spectral indices as an input variable combined with the RF algorithm to improve the accuracy of estimating chlorophyll content in wheat. However, most studies have only compared a single machine learning algorithm combined with spectral indices to a linear regression model and did not compare the differences between different machine learning algorithms. Therefore, the main objectives of this study were: (1) to evaluate the performances of published spectral indices in estimating chlorophyll content of potato plants, (2) to compare the performance of SVR, RF, PLSR and RR models in predicting potato chlorophyll content, (3) to generate chlorophyll content maps based on the optimal models, and (4) to verify whether the UAV images were able to detect the variation of potato chlorophyll content at different growth stages.
2 Materials and Methods
2.1 Experimental Sites
Experiments were carried out in Zhuozi Country, which is located in the middle of Inner Mongolia (extending from 110° 51′ E, 40° 38′ N to 112° 56′ E, 41 °16′ N), China (see Fig. 1). The major crops are potato, corn, and beans. This area is characterized with a middle temperate arid and semi-arid continental monsoon, cold winters and cool summers. The annual average precipitation is 544.5 mm, i.e., 90–95% between April and October. The average temperature is > 20 °C during the potato growing season.

Geographical location of the experimental site (a) in 2020 and site (b) in 2021
2.2 Experimental Design
Two experiments involving different potato cultivars were conducted at two different sites of Zhuozi county from June to September in 2020 and 2021, respectively. Experiment 1 in 2020 was a randomized complete block design with four replications. The potato cultivar was Yingniweite. There were five N treatments: four optimization of N application management, and conventional N rate fertilization (Con). The plot size was 10 × 10 m. There were six N treatments with four replications for Experiment 2 in 2021. The potato cultivar was Mingfeng 16. Five N treatments were same as those in experiment 1, but control (no N was applied) was added. The plot size was 10 × 12 m. For both experiments, the irrigation method of the study site was drip irrigation, and the field management was unified according to the local large field requirements.
2.3 Field Data Acquisition
A Minolta brand chlorophyll meter (Model SPAD-502; Spectrum Technologies Inc. Plainfield, IL) was used to measure the chlorophyll content of potato functional leaves (the 4th compound leaf from apex) before the UAV flight was carried out. Fifteen sampling points were randomly selected from each treatment. Each measured point represented the growth of a potato plant. The average of chlorophyll content of each plot can be precisely acquired by averaging the fifteen samples of data.
2.4 Acquisition of UAV Images
During the experimental period, the multispectral images were taken by the Parrot Bluegrass drone with Parrot Sequoia multispectral camera on 20 July, 3 August, and 20 August in 2020, whereas the images were acquired on 15 July, 6 August, and 25 August in 2021. UAV flight was conducted between 10:00 a.m. and 2:00 p.m. at 30 m high, resulting in a 10 cm ground sample distance (GSD). Multispectral images were taken from the following spectral regions: green (530–570 nm), red (640–680 nm), red-edge (730–740 nm), and near-infrared (770–810 nm). Because, during the flight, UAV images were affected by partly cloudy and the changing illumination in light intensity, a radiometric calibration white board and an onboard irradiance sensor were integrated in the multispectral camera to correct images for dash area and illumination differences the multispectral camera with (Kopačková-Strnadová et al. 2021; Franzini et al. 2019). Additional sensors such as GPS and laser sensor are also mounted in the UAV (see Fig. 2). The properties of the UAV camera are presented in Table 1.

Unmanned aerial vehicle (UAV)-based robotic system for chlorophyll content estimation in potato
2.5 UAV Image Processing
Figure 2 illustrates the flow chart of this study. Pix4Dmapper Version 4.5.6 was used to import all images taken in the same period according to the location coordinates in its properties, and to align the overlapping images using the feature point matching algorithm. Before the UAV flight, 4 ground control points were evenly arranged in the field to obtain accurate geographical reference positions. The plane precision of ground control points system is ± (8 + 1 × 10–6 × D) mm, and the elevation accuracy is ± (15 + 1 × 10–6 × D) mm. The area marked by ground control points is 40 cm × 40 cm. The UAV-based images were first aligned using Pix4Dmapper, and the camera parameters were estimated from the coordinates of their photographs and GCPs. A depth sharpening filter to further improve images edge detail was selected, and then dense point clouds were built. Finally, meshes and textures based on the camera’s own parameters were created and the processed images were exported as TIFF images. ENVI 5.1 was used to mark the region of interest (ROI) (see Fig. 1) in the experimental plot and to extract the average reflectance values in the four bands of ROI for each images.
2.6 Spectral Indices
Four canopy reflectance values (Green, Red, Red edge, Near-infrared) were then used to computer 12 spectral indices that were evaluated with their correlations with chlorophyll content (see Table 2). The indices were enhanced by the contribution of vegetation optical properties according to the spectral response of the canopy by combining several bands. And thus, spectral indices were able to reduce the effects of disturbing factors, such as soil background and atmosphere, particularly at low canopy coverage.
The relationship between 12 spectral indices and the chlorophyll content was calculated by Pearson correlation analysis. The correlation coefficient (r) values were used to evaluate the correlations between indices and chlorophyll content. Their performance was further evaluated by statistical comparison of the returned individual spectral indices correlation.
2.7 Machine Learning Algorithms
2.7.1 Partial Least Squares Regression and Ridge Regression (PLSR and RR)
Before the estimation model was constructed, Pearson correlation analyses between chlorophyll content measurements and 12 spectral indices were conducted. The indices with higher correlation coefficients (|r|> 0.4, and p values less than 0.01) were selected for machine learning algorithms. Compared to simple linear regression, PLSR and RR models are able to improve model accuracy and simplify the complexity of the model (Prado Osco et al. 2019). For the PLSR and RR methods, the grid-search method was used to find the optimal number of factors and regularization factor (α), and found that the optimal number of factors was 2 at tuber formation, tuber bulking and starch accumulation, 9 at the combined stages and (α) were 10 in all growth stages.
2.7.2 Support Vector Regression (SVR)
The support vector machine (SVM) was used to avoid having the problems of classification and regression (Wang et al. 2020). Since the loss function gamma (g), the error penalty factor (C), and the choice of kernel function affect the performance of the SVM, the “Support Vactor Regression” function in “sklearn” package was sued to implement the SVR algorithms in the Python 3.10 environment in this study. The commonly used radial basis kernel function (RBF) was applied in this study. Finally, a grid search was used to retrieve different combinations of g and C parameters. The best combination of g and C was 0.001 and 10.001 at tuber formation and tuber bulking, and 0.001 and 20.001 at starch accumulation and the combined stages for our data set, respectively.
2.7.3 Random Forest Regression Algorithm (RF)
The RF is an ensemble learning, that allows high accuracy and generalization performance from the overall model (Shi et al. 2020). Furthermore, the RF reduces overfitting by repeatedly putting back samples. In addition, RF takes into account for the influence of input variables (name: mtry) to attenuate the autocorrelation between variables effectively (Peng et al. 2021). The importance of each variable is expressed by the mean squared error (MSE) at the time of model calculation (Tan et al. 2019). Subsequently, the predictors are ranked according to the strength of the relationship between the input and response variables.
Spectral indices extracted from UAV images were used as input of variables for RF regression. To determine the optimal number of trees (ntree) for different stages of potato ntree values were tested from 100 to 400 with an increment of 100, and the value of 200 at tuber formation, 100 at tuber bulking, 400 at starch accumulation, and 400 at the combined stages were selected due to stable lower RMSE. The number of variables (mtry) was set to 4 at tuber formation, 9 at tuber bulking, 4 at starch accumulation, and 1 at the combined stages, as it yielded lower RMSE. In this study, the RF algorithms were implemented in the Python 3.10 environment, and the ‘Random Forest Regression” function in “sklearn” package was used. Other parameters were set as default values.
2.8 Data Analysis
In this study, there were 132 sample points. Around 70% of them were selected to train the four machine learning algorithms, and 30% data were for validation. The performances of the different models of machine learning were evaluated by comparing the coefficients of determination (R2), root square error (RMSE) and mean square error (MSE) in predictions. The higher the R2 and the lower the RMSE and MSE, the better the precision and accuracy of the models. The R2, RMSE and MSE were calculated according to Eqs. (1, 2, 3):
where \({y}_{i}\), \({\widehat{y}}_{i}\), and \(\overline{y}\) are the observed, predicted, and observed mean values, respectively, and n is the sample size.
3 Results
3.1 Variations in Plant Chlorophyll Content in Different N Treatments and Growth Stages
The results in this study showed that the chlorophyll content increased from tuber formation to starch accumulation (see Fig. 3). The chlorophyll content in the training data set ranged from 38.5 to 53.9 with a mean value of 45 and a CV value of 8.8%, while this in the testing data set ranged from 39.5 to 52.7 with a mean value of 45.5 and a CV value of 8.8%. The training and testing data sets showed a similar statistical distribution, indicating that there were no potentially biased estimations for model calibration and validation.

Variation of SPAD value of potato at tuber formation, tuber bulking and starch accumulation stages of tuber formation (T1), tuber bulking (T2) and starch accumulation (T3)
3.2 Relationships Between Spectral Indices and Chlorophyll Content of Potato Plants
The results showed that the most selected spectral indices were significantly correlated with the plant chlorophyll content regardless of growth stage (see Table 2 and Fig. 4). However, the results showed that there was the significant effect of the growth stages on the performances of the selected spectral indices (see Fig. 4). This study also found that the best spectral indices were GNDVI and CIgreen, especially at the growth stages of tuber formation and tuber bulking. At the starch accumulation and the combination of three stages, Ctr2 and CIred-edge showed significant correlations with potato chlorophyll content, suggesting that chlorophyll content can be effectively estimated using these spectral indices.


Correlation analysis of spectral indices with SPAD value at different stages
3.3 Estimation of Potato Chlorophyll Content Using Machine Learning Algorithms
In this study, the chlorophyll content was predicted from highly correlated spectral indices at different growth stages using four machine learning algorithms (SVR, RF, PLSR, and RR) (see Fig. 5). The results showed that RF performed the highest accuracy in estimating chlorophyll content with R2 ranging from 0.96 to 0.97, RMSE ranging from 0.62 to 0.81, and MSE ranging from 0.38 to 0.65 for all growth stages. Except for the PLSR, all other machine learning algorithms showed the highest estimation accuracy at the starch accumulation stage and followed by the tuber formation stage.

Relationships between the predicted value and observed value of training data set using four models at tuber formation stage (T1), tuber bulking stage (T2), starch accumulation stage (T3), and the combination of growth stages (T1 + T2 + T3)
The results in Fig. 6 showed that RF was the optimal model for estimating potato chlorophyll content with R2 of 0.61–0.83 that was greater than other models regardless of growth stage, whereas RMSE (1.75–2.31) and MSE (3.06–5.37) were smaller than other machine learning algorithms. Compared to the RF, other machine learning algorithms showed the least performance, especially PLSR and RR algorithms due to the growth stage effect.

Validation of the performance of SVR (a), RF (b), PLSR (c), and RR (d) at tuber formation stage, tuber bulking stage, starch accumulation stage and the combination of growth stages using the testing data set
3.4 Potato Chlorophyll Content Predictive Map
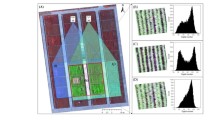
The RF model was used to map the predicted chlorophyll content of plants based on UAV multispectral images at the different growth stages (see Fig. 7). Figure 7 shows that the estimated value of chlorophyll content was relatively high in the tuber formation stage, whereas this gradually decreased with increasing plant growth. During the tuber bulking stage, the number of pixels of medium chlorophyll content (see Fig. 7b, e) increased due to the rapid growth over potato tuber stage. During late reproduction, the nutrient delivery to the crop is at its highest level, leading to the decrease in number of pixels due to low plant chlorophyll content in Fig. 7c, f. Meanwhile, chlorophyll content is significantly affected by the amount of N applied, and the use of UAV images mapping allows for real-time monitoring of the N status of the potato plant so that nutrient management of the crop can be adjusted.

Chlorophyll content map as indicated in SPAD values were derived by applying the RF model to the 8 spectral indices images for tuber formation (T1), tuber bulking (T2), and starch accumulation (T3)
4 Discussion
4.1 Feasibility of Using UAV to Estimate Potato Chlorophyll Content
The results in this study demonstrated that some spectral indices calculated from multispectral images were highly correlated with potato chlorophyll content, suggesting chlorophyll content of plants can be estimated by UAV multispectral image. Due to the different prediction performance of spectral indices in different growth stages, however, it was difficult to establish general models between different spectral indices and chlorophyll content, and the accuracy of simple linear regression models was still poor (Lee et al. 2020). Therefore, machine learning algorithms are promising as they can combine various spectral indices to improve the estimation accuracy (Qiu et al. 2021). Numerous studies have already used RF, SVR, PLSR, and RR algorithms for estimations of chlorophyll content (Tahir et al. 2018). However, it is still unclear whether these algorithms are most suitable to fulfill the requirement (Li et al. 2020). Therefore, this study compared four algorithms for precision and stability. The RF algorithm had higher R2 and lower RMSE and MSE than others algorithms for chlorophyll content estimates in different growth stages, indicating that RF algorithm can provide accurate chlorophyll content estimations. Our study also found that, since the model was trained using data set only from 2021, resulting in poor models validation (see Fig. 8), there is a need to have a large amount of experimental data for training the models in future studies for the model stability. Recently, there were many research showed that using UAVs combined the machine learning algorithms could be monitored of important crop growth parameters, such as biomass, N, and leaf area index (Prado Osco et al. 2019; Abdelbaki et al. 2021; Zhou et al. 2016), which further confirms the feasibility our method and results. Compared with conventional wet chemical method, our method demonstrated the advantages of convenience and speed, and compared with the chlorophyll meters (SPAD-502), using UAVs could achieve over a large area. Therefore, it was potential to estimate potato chlorophyll content using spectral indices calculated from UAV multispectral images.

Validation of the performance of RR, PLSR, SVR, and RF models at tuber formation stages (T1), tuber bulking stages (T2), starch accumulation (T3), and the combined stages (T1 + T2 + T3) using 2020 site data set
4.2 Analysis of Sensitive Bands
Selection of the appropriate spectral bands from all waveband to construct the spectral indices plays an important role in improving the model accuracy. At the tuber formation and the tuber bulking stages, the green wavelength is closely related to the potato chlorophyll content, which is in agreement with previous study of the relationship between the spectral reflectance in the green region and plant chlorophyll content (Zhao et al. 2018). Hensen and Schjoerring (2003) explained that chlorophyll a and b were more reflective in the green region, the green light region was often used to monitor chlorophyll content. However, this study suggests that the red-edge (680–800 nm) regions are important to potato chlorophyll content estimation at starch accumulation and the combination growth stages as well. Similar to the findings of Zheng et al. (2018b), the red-edge was a sensitive region for potato chlorophyll content. Chang-Hua et al. (2010) constructed a new red-edge spectral indices (RES) to estimate the chlorophyll content of sugar beet with high accuracy. Therefore, the influence of growth stages on the selection of sensitive bands should be taken into account when spectral indices are applied. In future studies, the optimization of the selected spectral indices should be further investigated at different growth stages to improve the accuracy of estimation of chlorophyll content in potato crops.
The spectral indices enhance the spectral characteristics sensitive to the biochemical properties of the vegetation by combining several bands and a specific formula format compared to the four bands. The wavebands of spectral indices contain some reference bands that are insensitive to chlorophyll content, and those bands are helpful to increase the signal-to-noise ratio (Yu et al. 2013). The spectral region used by the multispectral UAV is consistent with some satellite multispectral bands, such as the Sentinel-2. Therefore, the estimation framework constructed in this study can also be applied to satellite images for large-scale crop chlorophyll content estimation (see Fig. 2).
4.3 The Effect of the Number of Spectral Indices on the Model
Previous studies have also shown that predicting chlorophyll content was affected by the use of variable importance plot in RF that eliminates spectral variable inputs. The contribution of each spectral index to the RF model indicates the extent to which each of the spectral indices could predict the chlorophyll content variations (see Table 2 and Fig. 9). However, there is a need to analyze the performance of the model for the reduction in the number of input variables and increase computational efficiency. By implementing the best 1 to 3 spectral indices into the RF model, only a slight decrease was observed in its performance (see Fig. 10). Similarly, Prado Osco et al. (2019) used the variable importance graph in RF model to eliminate spectral variable inputs to reduce the amount of spectral data computation and keep the model with better performance.

Importance scores for spectral indices in the best RF model for predicting potato SPAD value at tuber formation stage (T1), tuber bulking stage (T2), starch accumulation stage (T3), and combined growth stages (T1 + T2 + T3)

Optimizing the number of predictors of spectral indices according to important scores at tuber formation stage (T1), tuber bulking stage (T2), starch accumulation stage (T3) and the combination of growth stages (T1 + T2 + T3) for training data set and testing data set
5 Conclusions
An integrated method combined with spectral indices and random forest model was proposed to estimate chlorophyll content in potato crop. Accuracy and robustness of the RF model were verified for each growth stage, such as tuber formation, tuber bulking, starch accumulation, and the combination of growth stages. The results of comparison of the RF model with SVR, PLSR, and RR showed that the accuracy of RF outperformed at each stage. The correlation analysis demonstrated that most of spectral indices were significantly correlated with the potato chlorophyll content, whereas the spectral indices with the strongest correlation varied at different period. The CIgreen and the green band highly contributed to the estimation model during the tuber formation and tuber bulking stage. However, the CIred edge and the red edge band provided higher contribution to the prediction model during the starch accumulation and the combination of growth stages.
References
Abdelbaki A, Schlerf M, Retzlaff R et al (2021) Comparison of crop trait retrieval strategies using UAV-based VNIR hyperspectral imaging. Remote Sens 13(9):1748. https://doi.org/10.3390/rs13091748
Argenta G, Silva PRF, Sangoi L (2004) Leaf relative chlorophyll content as an indicator parameter to predict nitrogen fertilization in maize. Ciência Rural 34:1379–1387. https://doi.org/10.1590/S0103-84782004000500009
Bareth G, Aasen H, Bendig J, et al (2015) Low-weight and UAV-based hyperspectral full-frame cameras for monitoring crops: spectral comparison with portable spectroradiometer measurements. Unmanned aerial vehicles (UAVs) for multi-temporal crop surface modelling. https://doi.org/10.1127/pfg/2015/0256
Bendig J, Bolten A, Bareth G (2013) UAV-based imaging for multi-temporal, very high resolution crop surface models to monitor crop growth variability. Unmanned aerial vehicles (UAVs) for multi-temporal crop surface modelling. https://doi.org/10.1127/1432-8364/2013/0200
Cao Z, Cheng T, Ma X et al (2017) A new three-band spectral index for mitigating the saturation in the estimation of leaf area index in wheat. Int J Remote Sens 38(13):3865–3885. https://doi.org/10.1080/01431161.2017.1306141
Chang-Hua JU, Yong-Chao T, Xia YAO et al (2010) Estimating leaf chlorophyll content using red edge parameters. Pedosphere 20(5):633–644. https://doi.org/10.1016/S1002-0160(10)60053-7
Clevers JGPW, Kooistra L, Van den Brande MMM (2017) Using Sentinel-2 data for retrieving LAI and leaf and canopy chlorophyll content of a potato crop. Remote Sens 9(5):405. https://doi.org/10.3390/rs9050405
Colorado JD, Calderon F, Mendez D et al (2020) A novel NIR-image segmentation method for the precise estimation of above-ground biomass in rice crops. PLoS ONE 15(10):e0239591. https://doi.org/10.1371/journal.pone.0239591
Franzini M, Ronchetti G, Sona G et al (2019) Geometric and radiometric consistency of parrot sequoia multispectral imagery for precision agriculture applications. Appl Sci 9(24):5314. https://doi.org/10.3390/app9245314
Gitelson AA, Merzlyzk MN (1994) Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J Photochem Photobiol B Biol 22:247–252. https://doi.org/10.1016/1011-1344(93)06963-4
Gitelson AA, Buschmann C, Lichtenthaler HK (1999) The chlorophyll fluorescence ratio F735/F700 as an accurate measure of the chlorophyll content in plants. Remote Sens Environ 69(3):296–302. https://doi.org/10.1016/S0034-4257(99)00023-1
Gitelson AA, Yuri G, Merzlyark MN (2003) Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J Plant Physiol 160(3): 271–282. https://doi.org/10.1078/0176-1617-00887
Hansen PM, Schjoerring JK (2003) Reflectance measurement of canopy biomass and nitrogen status in wheat crops using normalized difference vegetation indices and partial least squares regression. Remote Sens Environ 86(4):542–553. https://doi.org/10.1016/S0034-4257(03)00131-7
Houles V, Guerif M, Mary B (2007) Elaboration of a nitrogen nutrition indicator for winter wheat based on leaf area index and chlorophyll content for making nitrogen recommendations. Eur J Agron 27(1):1–11. https://doi.org/10.1016/j.eja.2006.10.001
Inoue Y, Sakaiya E, Zhu Y et al (2012) Diagnostic mapping of canopy nitrogen content in rice based on hyperspectral measurements. Remote Sens Environ 126:210–221. https://doi.org/10.1016/j.rse.2012.08.026
Jordan CF (1969) Derivation of leaf-area index from quality of light on the forest floor. Ecology 50:663–666. https://doi.org/10.2307/1936256
Kooistra L, Clevers JG (2016) Estimating potato leaf chlorophyll content using ratio vegetation indices. Remote Sens Lett 7(6):611–620. https://doi.org/10.1080/2150704X.2016.1171925
Kopačková-Strnadová V, Koucká L, Jelének J et al (2021) Canopy top, height and photosynthetic pigment estimation using parrot sequoia multispectral imagery and the unmanned aerial vehicle (UAV). Remote Sens 13(4):705. https://doi.org/10.3390/rs13040705
Lee H, Wang J, Leblon B (2020) Using linear regression, random forests, and support vector machine with unmanned aerial vehicle multispectral images to predict canopy nitrogen weight in corn. Remote Sens 12(13):2071. https://doi.org/10.3390/rs12132071
Li F, Miao Y, Hennig SD et al (2010) Evaluating hyperspectral vegetation indices for estimating nitrogen concentration of winter wheat at different growth stages. Precis Agric 11(4):335–357. https://doi.org/10.1007/s11119-010-9165-6
Li C, Chen P, Ma C et al (2020) Estimation of potato chlorophyll content using composite hyperspectral index parameters collected by an unmanned aerial vehicle. Int J Remote Sens 41(21):8176–8197. https://doi.org/10.1080/01431161.2020.1757779
Lu W, Lou J, Webster C et al (2021) Estimating construction waste generation in the Greater Bay Area, China using machine learning. Waste Manage 134:78–88. https://doi.org/10.1016/j.wasman.2021.08.012
Markwell J, Osterman JC, Mitchell JL (1995) Calibration of the Minolta SPAD-502 leaf chlorophyll meter. Photosynth Res 46(3):467–472. https://doi.org/10.1007/BF00032301
Martínez D, Guiamet J (2004) Distortion of the SPAD 502 chlorophyll meter readings by changes in irradiance and leaf water status. Agronomie 24(1):41–46. https://doi.org/10.1051/agro:2003060
Moghimi A, Pourreza A, Zuniga-Ramirez G et al (2020) A novel machine learning approach to estimate grapevine leaf nitrogen concentration using aerial multispectral imagery. Remote Sens 12(21):3515. https://doi.org/10.3390/rs12213515
Mutanga O, Adam E, Cho MA (2012) High density biomass estimation for wetland vegetation using WorldView-2 imagery and random forest regression algorithm. Int J Appl Earth Obs Geoinf 18:399–406. https://doi.org/10.1016/j.jag.2012.03.012
Peng L, Wang L, Ai XY et al (2021) Forecasting tourist arrivals via random forest and long short-term memory. Cogn Comput 13(1):125–138. https://doi.org/10.1007/s12559-020-09747-z
Prado Osco L, Marques Ramos AP, Roberto Pereira D et al (2019) Predicting canopy nitrogen content in citrus-trees using random forest algorithm associated to spectral vegetation indices from UAV-imagery. Remote Sens 11(24):2925. https://doi.org/10.3390/rs11242925
Qi H, Wu Z, Zhang L et al (2021) Monitoring of peanut leaves chlorophyll content based on drone-based multispectral image feature extraction. Comput Electron Agric 187:106292. https://doi.org/10.1016/j.compag.2021.106292
Qiu Y, Garg D, Kim SM et al (2021) Machine learning algorithms to predict flow boiling pressure drop in mini/micro-channels based on universal consolidated data. Int J Heat Mass Transf 178:121607. https://doi.org/10.1016/j.ijheatmasstransfer.2021.121607
Rafael MT, María SC, Sergio OM et al (2014) Environmental and economic impact of Forest fires in Puerto Rico 2013–2014. Open J for 5(04):353. https://doi.org/10.4236/ojf.2015.54030
Rouse JW, Haas RH, Schell JA (1974) Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec Publ 351:309
Shah SH, Angel Y, Houborg R et al (2019) A random forest machine learning approach for the retrieval of leaf chlorophyll content in wheat. Remote Sens 11(8):920. https://doi.org/10.3390/rs11080920
Shi L, Liu Q, Huang C et al (2020) Comparing pixel-based random forest and the object-based support vector machine approaches to map the quasi-circular vegetation patches using individual seasonal fused GF-1 imagery. IEEE Access 8:228955–228966. https://doi.org/10.1109/ACCESS.2020.3045057
Singhal G, Bansod B, Mathew L et al (2019) Chlorophyll estimation using multi-spectral unmanned aerial system based on machine learning techniques. Remote Sens Appl Soc Environ 15:100235. https://doi.org/10.1016/j.rsase.2019.100235
Song C (2013) Optical remote sensing of forest leaf area index and biomass. Prog Phys Geogr 37(1):98–113. https://doi.org/10.1177/0309133312471367
Sripada RP, Heiniger RW, White JG et al (2006) Aerial color infrared photography for determining early in-season nitrogen requirements in corn. Agron J 98:968–977. https://doi.org/10.2134/agronj2005.0200
Tahir MN, Naqvi SZA, Lan Y et al (2018) Real time estimation of chlorophyll content based on vegetation indices derived from multispectral UAV in the kinnow orchard. Int J Precis Agric Aviat. https://doi.org/10.33440/j.ijpaa.20180101.0001
Tan K, Ma W, Wu F et al (2019) Random forest–based estimation of heavy metal concentration in agricultural soils with hyperspectral sensor data. Environ Monit Assess 191(7):1–14. https://doi.org/10.1007/s10661-019-7510-4
Théau J, Gavelle E, Ménard P (2020) Crop scouting using UAV imagery: a case study for potatoes. J Unman Veh Syst 8(2):99–118. https://doi.org/10.1139/juvs-2019-0009
Tucker C, Elgin J, Mcmurtrey J (1979) Monitoring corn and soybean crop development with hand-held radiometer spectral data. Remote Sens Environ 8:237–248. https://doi.org/10.1016/0034-4257(79)90004-X
Uddling J, Gelang-Alfredsson J, Piikki K et al (2007) Evaluating the relationship between leaf chlorophyll concentration and SPAD-502 chlorophyll meter readings. Photosynth Res 91(1):37–46. https://doi.org/10.1007/s11120-006-9077-5
Verrelst J, Muñoz J, Alonso L et al (2012) Machine learning regression algorithms for biophysical parameter retrieval: opportunities for Sentinel-2 and-3. Remote Sens Environ 118:127–139. https://doi.org/10.1016/j.rse.2011.11.002
Viljanen N, Honkavaara E, Näsi R et al (2018) A novel machine learning method for estimating biomass of grass swards using a photogrammetric canopy height model, images and vegetation indices captured by a drone. Agriculture 8(5):70. https://doi.org/10.3390/agriculture8050070
Wolanin A, Camps-Valls G, Gómez-Chova L et al (2019) Estimating crop primary productivity with Sentinel-2 and Landsat 8 using machine learning methods trained with radiative transfer simulations. Remote Sens Environ 225:441–457. https://doi.org/10.1016/j.rse.2019.03.002
Wu C, Niu Z, Tang Q et al (2008) Estimating chlorophyll content from hyperspectral vegetation indices: modeling and validation. Agric For Meteorol 148(8–9):1230–1241. https://doi.org/10.1016/j.agrformet.2008.03.005
Wu J, Chen XY, Zhang H et al (2019) Hyperparameter optimization for machine learning models based on Bayesian optimization. J Electron Sci Technol 17(1):26–40. https://doi.org/10.11989/JEST.1674-862X.80904120
Yu K, Li F, Gnyp ML et al (2013) Remotely detecting canopy nitrogen concentration and uptake of paddy rice in the Northeast China Plain. ISPRS J Photogramm Remote Sens 78:102–115. https://doi.org/10.1016/j.isprsjprs.2013.01.008
Yu K, Lenz-Wiedemann V, Chen X et al (2014) Estimating leaf chlorophyll of barley at different growth stages using spectral indices to reduce soil background and canopy structure effects. ISPRS J Photogramm Remote Sens 97:58–77. https://doi.org/10.1016/j.isprsjprs.2014.08.005
Zhao B, Duan A, Ata-Ul-Karim ST et al (2018) Exploring new spectral bands and vegetation indices for estimating nitrogen nutrition index of summer maize. Eur J Agron 93:113–125. https://doi.org/10.1016/j.eja.2017.12.006
Zheng Q, Huang W, Cui et al (2018a) New spectral index for detecting wheat yellow rust using Sentinel-2 multispectral imagery. Sensors 18(3):868. https://doi.org/10.3390/s18030868
Zheng T, Liu N, Wu L et al (2018b) Estimation of chlorophyll content in potato leaves based on spectral red edge position. IFAC-PapersOnLine 51(17):602–606. https://doi.org/10.1016/j.ifacol.2018.08.131
Zhou X, Zhu X, Dong Z et al (2016) Estimation of biomass in wheat using random forest regression algorithm and remote sensing data. Crop J 4(3):212–219. https://doi.org/10.1016/j.cj.2016.01.008
Funding
This research was funded by Programs for Key Science and Technology Development of Inner Mongolia in 2019 and 2020 (2019GG248 and 2020GG0038), the National Natural Science Foundation of China (32160757).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yin, H., Huang, W., Li, F. et al. Multi-temporal UAV Imaging-Based Mapping of Chlorophyll Content in Potato Crop. PFG 91, 91–106 (2023). https://doi.org/10.1007/s41064-022-00218-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41064-022-00218-8