
Abstract
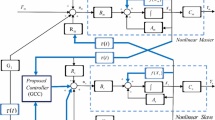
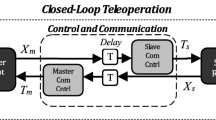
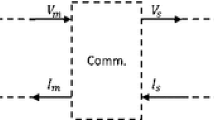
Control input saturation is a significant problem in the physical control systems, such as teleoperation systems, due to the limited power of actuators. The main goal of this paper is to present a control structure to achieve delay-independent stability of bilateral teleoperation systems under actuator saturation. Based on the Razumikhin theorem, stability analysis of such systems is realized via the state convergence technique. The difficulty of this stability study comes from the time delay appeared in the transmission channel and the nonlinearity term imposed by the control input saturation. First, a control structure is developed in terms of the transparency condition to attain the master and slave states convergence. Afterward, guaranteed cost controller (GCC) in terms of linear matrix inequality is designed to attain both stability and transparency simultaneously. Eventually, the optimal GCC’s parameters are computed by considering the problem under study as a convex optimization. Simulations illustrate that the performance of the control structure is satisfactory.









Similar content being viewed by others
References
Ahmad U, Pan YJ (2018) A time domain passivity approach for asymmetric multilateral teleoperation system. IEEE Access 6:519–531
Ahn SH, Yoon JS (2002) A bilateral control scheme for 2-DOF telemanipulators with control input saturation. Control Eng Pract 10:1081–1090
Alfi A, Farrokhi M (2006) Bilateral control to achieve transparent teleoperation with perturbation of static time delay. In: IECON 2006-32nd annual conference on IEEE industrial electronics, pp 513–518
Alfi A, Bakhshi A, Yousefi M, Talebi HA (2016) Design and implementation of robust-fixed structure controller for telerobotic systems. J Intell Rob Syst 83:253–269
Aracil R, Azorín JM, Ferre M, Peña C (2013) Bilateral control by state convergence based on transparency for systems with time delay. Robot Auton Syst 61:86–94
Azorin JM, Reinoso O, Aracil R, Ferre M (2004a) Control of teleoperators with communication time delay through state convergence. J Field Robot 21:167–182
Azorin JM, Reinoso O, Aracil R, Ferre M (2004b) Generalized control method by state convergence for teleoperation systems with time delay. Automatica 40:1575–1582
Cao YY, Sun YX, Cheng C (1998) Delay-dependent robust stabilization of uncertain systems with multiple state delays. IEEE Trans Autom Control 43:1608–1612
Cao YY, Lin Z, Hu T (2002) Stability analysis of linear time-delay systems subject to input saturation. IEEE Trans Circuits Syst I Fundam Theory Appl 49:33–40
Chang SS, Peng T (1972) Adaptive guaranteed cost control of systems with uncertain parameters. IEEE Trans Autom Control 17:474–483
De Rossi G, Muradore R (2017) A bilateral teleoperation architecture using Smith predictor and adaptive network buffering. IFAC-PapersOnLine 50:11421–11426
Fernando TL, Phat VN, Trinh HM (2013) Output feedback guaranteed cost control of uncertain linear discrete systems with interval time-varying delays. Appl Math Model 37:15809
Ghadiri H, Jahed-Motlagh MR (2016) LMI-based criterion for the robust guaranteed cost control of uncertain switched neutral systems with time-varying mixed delays and nonlinear perturbations by dynamic output feedback. Complexity 21:555–578
Hokayem PF, Spong MW (2006) Bilateral teleoperation: an historical survey. Automatica 42:2035–2057
Hu T, Lin Z (2001) Control systems with actuator saturation: analysis and design. Springer, Berlin
Hu T, Lin Z, Chen BM (2002) An analysis and design method for linear systems subject to actuator saturation and disturbance. Automatica 38:351–359
Huang P, Dai P, Lu Z, Liu Z (2018) Asymmetric wave variable compensation method in dual-master-dual-slave multilateral teleoperation system. Mechatronics 49:1–10
Kawai Y, Fujita M (2008) Experimental implementation of bilateral teleoperation with time delay using command governor. In: SICE annual conference. IEEE, pp 2877–2882
Lawrence DA (1993) Stability and transparency in bilateral teleoperation. IEEE Trans Robot Autom 9:624–637
Lee SJ, Ahn HS (2010) Synchronization of bilateral teleoperation systems with input saturation. In: IEEE international conference on control automation and systems, pp 1357–1361
Lee SJ, Ahn HS (2011) A study on bilateral teleoperation with input saturation and systems. In: 11th international conference on control, automation and systems. IEEE, pp 161–166
Lee S, Lee HS (1991) A kinesthetically coupled teleoperation: its modeling and control. In: Fifth international conference on advanced robotics. IEEE, pp 255–260
Li Y, Johansson R, Liu K, Yin Y (2015) Guaranteed cost control design for delayed teleoperation systems. J Frankl Inst 352:5085–5105
Mohammadi L, Alfi A, Xu B (2017) Robust bilateral control for state convergence in uncertain teleoperation systems with time-varying delay: a guaranteed cost control design. Nonlinear Dyn 88:1413–1426
Moheimani SR, Petersen IR (1997) Optimal quadratic guaranteed cost control of a class of uncertain time-delay systems. IEE Proc Control Theory Appl 144:183–188
Reinoso O, Sabater JM, Perez C, Azorin JM (2003) A new control method of teleoperation with time delay. In: The international conference on advanced robotics, Coimbra, Portugal, pp 100–105
Sharifi M, Salarieh H, Behzadipour S, Tavakoli M (2017) Stable nonlinear trilateral impedance control for dual-user haptic teleoperation systems with communication delays. J Dyn Syst Meas Contr 139:121012
Shia P, Boukasb EK, Shic Y, Agarwald RK (2003) Optimal guaranteed cost control of uncertain discrete time-delay systems. J Comput Appl Math 157:435–451
Wang Z, Chen Z, Liang B, Zhang B (2018) A novel adaptive finite time controller for bilateral teleoperation system. Acta Astronaut 144:263–270
Zhang J, Liu W, Gao L, Li L, Li Z (2018) The master adaptive impedance control and slave adaptive neural network control in underwater manipulator uncertainty teleoperation. Ocean Eng 165:465–479
Zhao H, Zuo Z, Jia Z, Wang Y (2008) Guaranteed cost control for systems with saturating actuators and input delays. In: 2008 IEEE conference on robotics, automation and mechatronics. IEEE, pp 483–487
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mohammadi, L., Alfi, A. Guaranteed Cost Control in Delayed Teleoperation Systems Under Actuator Saturation. Iran J Sci Technol Trans Electr Eng 43, 827–835 (2019). https://doi.org/10.1007/s40998-019-00206-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40998-019-00206-6