
Abstract
Recently, explanations of the sub-synchronous oscillation (SSO) caused by wind farms based on direct-driven wind generators (DDWGs) have been published in the literatures, in which the controller parameters of DDWGs and the system equivalent parameters play an important role. However, more than one set of parameters can cause weakly damped sub-synchronous modes. The most vulnerable and highly possible scenario is still unknown. To find scenarios that have potential oscillation risks, this paper proposes a small disturbance model of wind farms with DDWGs connected to the grid using a state-space modeling technique. Taguchi’s orthogonal array testing is introduced to generate different scenarios. Multiple scenarios with different parameter settings that may lead to SSOs are found. A probabilistic analysis method based on the Gaussian mixture model is employed to evaluate the consistency of these scenarios with the actual accidents. Electromagnetic transient simulations are performed to verify the findings.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
1.1 Motivation
With the vigorous exploitation of wind power generation, stability problems associated with wind farms have increased [1,2,3,4,5], among which sub-synchronous oscillation (SSO) is a prominent example. SSO was initially defined as an electric power system condition where the electric network exchanges significant energy with a turbine generator at one or more of the natural frequencies of the combined system below the synchronous frequency of the system [6]. With deepening research, the concept of SSO has expanded to systems with wind generators. In October 2009, a series of offline wind generators and cracked crowbar circuits were found in the Electric Reliability Council of Texas event [3]. In December 2012, a wind farm in North China reported that a part of their generators were shut down and that a sub-synchronous current was sent out to the main grid during the accident [4, 5]. In July 2015, several thermal generators were tripped off by shaft torsional vibration relay in a thermal power plant in Hami, Xinjiang Uygur Autonomous Region of China. This event led to the emergent power reduction of a nearby high-voltage direct-current (HVDC) transmission line and caused sharp fluctuation in the frequency of the grid. Analysis of the records of the phasor measurement units after the accident revealed that the sub-synchronous current that aroused the torsional vibration came from wind farms north of the region [7].
This accident exhibited unique characteristics. First, most wind generators in Hami wind farms are direct-driven wind generators (DDWGs), i.e., Type-4 wind generators. Second, there is no series compensator in the region. Finally, the thermal generators and HVDC line showed no indication of SSO at the very beginning that the SSO current arouse. According to [7], this accident was the first reported SSO event caused by wind farms based on DDWGs. Thus far, researchers have not reached a consensus on the mechanism of this SSO.
This paper focuses on the new type of SSO and provides a methodology for finding a system scenario consistent with the actual accident, considering the stochastic variation in the operating conditions of the wind farms.
1.2 Literature review
Recently, a series of researches presented various explanations about this event. Reference [8] indicated that this event should be categorized as a new type of sub-synchronous interaction. Reference [9] constructed a small signal model for grid-connected wind farms regarding the wind farms as a single equivalent generator and then reproduced the SSO under specific operating conditions. The authors inferred that there might be an unstable mode with sub-synchronous frequency that was strongly correlated with the controller of the converter in DDWGs. In this system, the equivalent impedance of the wind farms behaved as a capacitive impedance with a small negative resistance. Therefore, oscillation, whose frequency was determined by the equivalent capacity and system reactance, might arise. Reference [10] proposed an impedance model, based on which the authors stated that interactions between wind farms and the weak grid might produce negative damping for the SSO. The interaction is associated with the control parameters of the wind generators. Reference [11] proposed a model with a single inverter connected to the grid while considering the interaction between the phase-lock loop (PLL) and the current-control loop. The authors declared that mismatching between the current loop parameters and the system operating point or the grid reactance might result in oscillation.
All of the aforementioned studies attempted to reveal the mechanism of the SSO to some extent. However, at least two problems remain:
-
1)
The impact of the DDWG control parameters on the oscillation characteristics was mentioned in all of the aforementioned reports. However, it is commonly known that the system dynamics can be tuned by adjusting the control parameters. Systems with different parameter settings may have similar behaviors. Parameters adjusted to reproduce the SSO may not be the same as those in reality.
-
2)
According to [7], the frequency of the sub-synchronous current varied continuously during the SSO. However, no existing literature has provided either a strictly theoretical explanation of this phenomenon or a quantitative simulation to reproduce it.
1.3 Contributions
The main contributions of this paper are correlated to the above problems:
-
1)
It provides a practical method to identify the scenarios that may have the risk of SSO.
-
2)
It proposes a probabilistic assessment method to evaluate the possible frequency deviation range of the SSO in the scenarios mentioned above. By comparing the deviation range with that of the recorded SSO, people can determine whether the scenarios are consistent with the actual situation.
1.4 Organization
The remainder of the paper is organized as follows. Section 2 provides a simplified model for a grid-connected DDWG-based wind farm. Eigen-analysis is thereafter conducted. Section 3 introduces Taguchi’s orthogonal array (OA) testing to find different scenarios that may have SSO risk. A probabilistic assessment method based on the Gaussian mixture model is introduced in Section 4 to evaluate the frequency deviation range of possible SSOs, so that the consistency of the obtained scenarios with the actual accident can be inferred. In Section 5, the results are verified via electromagnetic simulations. Brief conclusions are drawn in Section 6.
2 System model and eigen-analysis
2.1 State-space model of wind farm
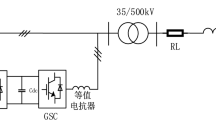
Hami, which is located in northwest China, is far from load centers. In this region, electric power of wind farms is usually gathered in a collecting substation and then transmitted to the main grid through long transmission lines. In this study, an equivalent model is employed for convenience, as shown in Fig. 1. Here, multiple 1.5 MW DDWGs, each of which has the same capacity, structure, and control parameters, constitute a wind farm. Each DDWG is connected first to the point of common coupling and then to the main grid through a series of boost transformers and transmission lines. These transformers and lines are equivalent to an impedance by unifying them into one voltage level.

Model of wind farm connected to grid
Figure 2 shows the typical structure of a DDWG. It is comprised of a wind turbine (WT), a permanent magnet synchronous generator (PMSG), a fully rated converter and its controller, and a filter circuit. The grid-side converter (GSC) can control the output active and reactive power by utilizing a decoupling control strategy, and the control strategy of the machine-side part (i.e., the WT, the PMSG, and the machine-side converter (MSC)) is usually to convert as much wind power into electric power as possible. That is, the PMSG is controlled via maximum power point tracking, and the MSC takes isd = 0 control to convert the maximum active power into a direct-current (DC) power on the capacitor. Meanwhile, the GSC controls the electromagnetic power and maintains the stability of the DC bus voltage. Hence, the machine-side part of the DDWG has little interaction with the grid. The time scale of dynamics of the WT and PMSG significantly deviate from the sub-synchronous range as well. Moreover, [12,13,14] indicates that the electromagnetic oscillation mode of the DDWG has a stronger relationship with the GSC than with other parts of the DDWG. Therefore, this paper reasonably simplifies the machine-side dynamics of the DDWG and uses a DC power resource to represent the electromagnetic power received from the PMSG. The structure of the circuits and controllers of the grid side adopted in this paper is presented in Fig. 3.

Structure of typical DDWG

Model of wind generators connected to grid
The symbols in Fig. 3 are as follows: \( u_{\text{dc}} \) and \( u_{\text{dc}}^{ *} \) are the measured and reference DC bus voltage; \( i_{d} \) and \( i_{q} \) are the d-axis component and q-axis component of the output current of the GSC; \( e_{d} \) and \( e_{q} \) are the d-axis component and q-axis component of the fundamental output voltage of the GSC; \( U_{g} \) is the amplitude of the terminal phase voltage; P is the DC power sent by MSC; Q* is the reference of the output reactive power; δ is the output angle of the PLL; Rg and Lg are the filter resistance and inductance.
The model of the system shown in Figs. 1, 2 and 3 has been well detailed in [12,13,14] and will not be discussed at length here.
Because eigen-analysis is needed to study the SSO, a linearized model is necessary here. In this system model, the dynamics of the DDWGs can be described by a set of differential equations, while the constraints of the grid can be described by algebraic equations. Then, the system with DDWG-based wind farms connected to the main grid can be described by a set of differential-algebraic equations as:
The system can be linearized at an equilibrium point x0. The incremental form of (1) is:
where \( \Delta {\varvec{x}} \) and \( \Delta {\varvec{u}} \) are the incremental vectors and \( {{\user2 A}} = \left. {\frac{{\partial {\varvec{f}}}}{{\partial {\varvec{x}}}}} \right|_{{{\varvec{x}} = {\varvec{x}}_{0} }} \), \( {{\user2 B}} = \left. {\frac{{\partial {\varvec{f}}}}{{\partial {\varvec{u}}}}} \right|_{{{\varvec{x}} = {\varvec{x}}_{0} }} \), \( {{\user2 C}} = \left. {\frac{{\partial {\varvec{g}}}}{{\partial {\varvec{x}}}}} \right|_{{{\varvec{x}} = {\varvec{x}}_{0} }} \), \( {{\user2 D}} = \left. {\frac{{\partial {\varvec{g}}}}{{\partial {\varvec{u}}}}} \right|_{{{\varvec{x}} = {\varvec{x}}_{0} }} \).
Then, \( \Delta {\varvec{u}} \) is replaced with \( \Delta {\varvec{x}} \), and the whole system can be expressed as [15, 16]:
where \( {\tilde{\varvec{A}}} = {\user2{A}} - {\varvec{BD}}^{ - 1} {\varvec{C}} \).
The system dynamics around the operating point x0 can be obtained via eigen-analysis of the matrix \( {\tilde{\varvec{A}}} \).
2.2 Eigen-analysis
Referring to [10], the base scenario of the system is set as follows: a wind farm with 700 DDWGs is connected to the main grid. Each DDWG outputs 5% of its rated power. The short-circuit ratio (SCR) of the grid is 1.34. The control parameters of the DDWGs are from the manufacturer. The eigen-analysis results are shown in Table 1.
Table 1 shows that there is an SSO mode in the base scenario. However, the SSO mode has very strong damping, so that SSO does not occur, in general.
The results differ from those given in [10]. Because the models of the DDWG and the grid are similar, the reason is very likely to be different control parameters.
3 Scenario-based analysis using Taguchi method
Various factors are correlated to the oscillation features of the system shown in Fig. 1, especially the control parameters. For any control system, the dynamics can always be modified by tuning the control parameters. Therefore, a systematic approach is needed to find scenarios with different parameter settings that are more consistent with the actual accident, so that the reason for the SSO event in Hami can be better explained.
3.1 Taguchi’s OA testing
The Taguchi method was proposed by Dr. Genichi TAGUCHI in the 1950s and was first utilized in product/process design to optimize the quality of products. Its target is to find the optimized combination of adjustable variables in the design stage that makes products immune to noises or disturbances and achieve excellent robust quality at minimum cost. The core tool of the Taguchi method—Taguchi OA testing (TOAT) can rationally arrange the testing variables and select several representative testing variables to cover the whole variable space, avoiding a discussion of the correlation among different variables.
Given a variable space constituting M variables \( {\tilde{\varvec{w}}} = \left[ {\begin{array}{*{20}c} {\tilde{w}_{1} } & {\tilde{w}_{ 2} } & \cdots & {\tilde{w}_{M} } \\ \end{array} } \right] \), if each variable has B levels of value, the whole variable space has BM combinations. TOAT aims to select a subset comprising a relatively small number of combinations to represent all of them. The subset is chosen according to OAs. An OA is a matrix of the form \( L_{H} \left( {B^{M} } \right) \), where H is the number of elements of the subset. The matrix has H rows, each of which represents a testing combination, and B columns, each of which represents levels of a variable in different tests [17, 18]. An OA has the following properties:
-
1)
In each column, every level of a variable occurs the same amount of times.
-
2)
In any two columns, combinations of two levels occur the same amount of times.
-
3)
The resulting matrix still satisfies 1) and 2) if any two columns are exchanged or some columns are neglected.
The minimum number of tests Hmin is equal to the number of degrees of freedom (DOFs) of the OA, DT, plus 1. The number of DOFs for the OA is the sum of the DOFs of all variables, where the DOF of one variable is equal to the number of its level minus 1, i.e.,
where Bi is the level of the ith variable. Therefore, the number of tests can be significantly reduced. For example, only eight tests are needed for a system with seven variables where each variable has two levels, which generates a total of 128 possible combinations. OAs can be constructed via mathematical methods [17] or directly indexed from OA libraries [19].
3.2 Selection of testing variables
For the equivalent system shown in Fig. 1, variables that may affect the SSO include the number of grid-connected DDWGs, the output power of the DDWGs, the strength of the intertie between the wind farms and the main grid, and the control parameters. Among these, the number of DDWGs changes the topology of the system, the output power and the strength of the intertie affect the operating point of the system, and the control parameters directly influence the dynamics of the system. The control parameters are adjustable, while the former three are operating conditions related to the wind farm and are uncontrollable.
The Taguchi method is a robust design scheme. It aims to design the optimized performance of products that is hardly affected by circumstance. According to the accident report and [7], SSO has been observed under many different operating conditions. Because the control parameters were fixed during long-term operation, the scenarios that are consistent with the actual accident must exhibit potential SSO risk under a large range of different working conditions.
Referring to the idea of the Taguchi method, finding combinations of control parameters that generate SSO modes with weak or negative damping under different system operating conditions becomes the aim of the tests.
3.3 Definition of levels of variables
Generally, if a variable has a linear relationship with the performance function of the system, it should have two levels. If it has a quadratic or higher-order relationship with the performance function, three levels of value should be assigned to it. In this research, the performance function of the system should be the eigenvalues. Obviously, the relationship between the eigenvalues and the testing variables cannot be described as a linear function; thus, each factor needs three levels.
-
1)
Control parameters
The eigen-analysis in the base scenario is based on a group of control parameters provided by the manufacturer, which lead to good dynamic performances. However, the parameters in the actual situation are unknown. Set a control parameter from the manufacturer as k, then take 0.1k and 10k as the other two levels, respectively.
-
2)
Output power of DDWG
The distribution of the wind speed at a certain location can be described by a Weibull distribution. Because there are cut-in and cut-out speeds in the power curve of a wind generator, after combining with a Weibull distribution, the probability density function (PDF) of the output power generally has the form shown in Fig. 4 [20].

Probability density of typical output power of wind generator
The rated power of the DDWG SW is 1.5 MW; thus, the power levels can be set to low, medium, and high, corresponding to 0 output, the average output power (e.g., the mathematical expectation of the output power), and the full output, respectively. The controller of the converter will stop working when the output power becomes 0; thus, the dynamic characteristics are similar to those of the DDWG being tripped off, and the first level can be designated as 0.05 p.u..
-
3)
Number of grid-connected DDWGs
The dynamics of the system may change with the number of DDWGs that are connected to the grid. In some situations, such as insufficient wind power or the wind generator being out-of-service because of orders from the regional dispatch center, the number of grid-connected wind generators is not constant. According to the accident report, the level of number of DDGWs can be set to 100, 400 or 700.
-
4)
Reactance of tie line
For the equivalent system shown in Fig. 1, the reactance of the tie line (i.e., L0) reflects both the strength of the interconnection between the wind farm and the main grid and the operating conditions of the main grid. The strength can be represented by the SCR:
where Un is the voltage grade of the system; ωn is the rated angle speed; n is the number of grid-connected DDWGs.
Here the level of the reactance can be designated as SCR = 1.34, 2, and 4, representing very weak, weak, and strong, respectively.
3.4 Implementation of TOAT
In TOAT, two OAs—called the inner OA and outer OA—are usually employed for the tests. The inner OA is for generating combinations of controllable variables, and the outer OA is for uncontrollable variables. These two OAs simultaneously determine a combination of variables. For simplicity and clarity, the test results are separately discussed for these two OAs hereinafter.
In this paper, the control parameters of the DDWGs are controllable variables to be tested by the inner OA, where there are six parameters and each of them has three levels. \( L_{18} \left( {3^{6} } \right) \) formed by the last six columns of the standard OA \( L_{18} \left( {2^{1} \times 3^{7} } \right) \), can be selected as the inner OA. On the other hand, the number of grid-connected DDWGs, the output power of the DDWGs, and the strength of the intertie are regarded as uncontrollable variables; thus, the OA \( L_{9} \left( {3^{3} } \right) \) formed by the last three columns of the standard OA \( L_{9} \left( {3^{4} } \right) \) can be chosen as the outer OA. First, the control parameters in the base scenario are replaced by 18 different control-parameter combinations. Then, eigen-analysis is conducted on the 18 scenarios. Table 2 shows the three sets of parameters with which SSO may occur.
In Table 2, the bold terms represent the sub-synchronous modes with weak damping. The outer OA is utilized to exam the impact of the uncontrollable variables (i.e., the number of grid-connected DDWGs, the output power of the DDWGs, and the strength of the intertie) on the above three sets of parameters.
Table 3 shows the damping ratios of the sub-synchronous mode under different combinations of uncontrollable variables. The bold term is to highlight a negative damping situation. Here, “N/A” represents a test where there is at least one positive real eigenvalue, which indicates that the system loses stability without oscillation. Therefore, the test does not match the actual accident and is invalid.
In Table 3, the 5th column includes a negative damping ratio, which means that SSO will occur. The 1st and the 2nd sets of parameters show little difference in terms of damping ratios under various operating conditions, while the average value of the 6th column is significantly larger than the other two. This means that the systems with the 1st and the 2nd groups of parameters have smaller average damping ratios than the system with the 3rd set of parameters and have more opportunity to match the actual accident.
4 Probability assessment for SSO considering randomness of operating conditions of wind farm
According to [7], the frequency of the sub-synchronous current during the Hami event exhibits significant and continuous variation. For example, it varied by 8 Hz in half an hour before the tripping of the thermal generators. Because there is not a large change in the operating conditions of the main grid within half an hour, the frequency variation is attributed to the change in the operating conditions of the wind farm. Then, if an SSO mode found by the TOAT is close to that in the actual accident, the frequency of the corresponding oscillation mode should also have a relatively wide distribution range when the operating conditions of the wind farm vary, and the damping ratio should be negative under some operating conditions. In contrast, if the frequency distribution range of the oscillation mode is narrow or the damping ratio has little chance to be negative, the found SSO mode may not match that in the actual accident. This section introduces a probabilistic assessment method for evaluating how consistent a found SSO mode is with that in the actual accident by calculating the distribution of the frequency and the damping ratio of the SSO mode.
4.1 Probabilistic analysis method based on Gaussian mixture model (GMM)
The GMM describes the PDF of arbitrary random distributions as a weighted sum of a group of PDFs of Gaussian distributions. The PDF of a W-dimensional stochastic variable \( {\tilde{\varvec{x}}} \) can be expressed as:
where \( f_{{{\tilde{\varvec{x}}}}} \left( {\varvec{x}} \right) \) is the joint distribution of \( {\tilde{\varvec{x}}} \); \( N\left( {\left. {\varvec{x}} \right|{\varvec{\mu}}_{m} ,\;{\varvec{\Sigma}}_{m} } \right) \) is a multivariate Gaussian distribution whose mean vector is \( {\varvec{\mu}}_{m} \) and covariance matrix is \( {\varvec{\Sigma}}_{m} \); and \( \omega_{m} \) is the weight of the mth component.
The GMM makes it possible to analytically describe the functional relationship between system parameters (e.g., the frequencies and the damping ratios of oscillations) and correlative stochastic variables. Reference [21] proposed a GMM-based probabilistic analysis method that obtained the distribution of the damping ratio of low-frequency oscillation by building a GMM for forecast errors of the wind power. It approximately described the relationship between the damping ratio of the oscillation mode and the operating conditions of wind farms with a quadratic function and decoupled the correlation among outputs of wind farms via Cholesky decomposition. The main process of this method is shown in Fig. 5, where \( \theta \), \( {\varvec{\Delta}} \), \( {\varvec{\Gamma}} \) are the constant term, the 1st order sensitivity matrix, and the 2nd order sensitivity matrix, respectively.

Flowchart of GMM-based probabilistic analysis method
4.2 Modeling for joint distribution of wind power and number of grid-connected DDWGs
Because the wind power is neither less than 0 nor more than 1 p.u., its PDF is distorted near the edge. The Beta distribution well reflects this feature [22]; hence, this paper employs the Beta distribution to describe the distribution of the output power of the wind farm. The number of grid-connected DDWGs has a positive relationship with the wind power. When the wind speed increases, the number of DDWGs that reaches the cut-in wind speed increases, whereas some DDWGs do not keep generating when the wind speed decreases. Besides, the number of DDWGs has certain boundaries between 0 and the total installed amount. Therefore, it can also be described by a Beta distribution. The positive correlation is denoted by the correlation coefficient ρ. Figure 6 shows the joint distribution of the two variables when ρ = 0.8.

Joint distribution of power error and number of grid-connected DDWGs
4.3 Analytical expression of SSO mode
The damping ratio and the frequency both have an implicit relationship with the wind power and the number of grid-connected DDWGs, i.e.,
where f and ξ are the frequency and the damping ratio of the SSO mode; \( {\user2{X}} = \left[ {\begin{array}{*{20}c} P & n \\ \end{array} } \right]^{\text{T}} \) is the vector formed by the wind power P and the grid-connected DDWG number n. Via Taylor series expansion at the operating point X0, (6) can be approximated in quadratic form, which is more accurate than the linear method [20].
4.4 Probability assessment for SSO
By calculating the cumulative distribution function (CDF) and PDF of the frequency and the damping ratio of the SSO mode, the probability of the SSO matching the actual accident considering the randomness of the operating conditions of the wind farm can be assessed. Calculations for the base scenario and the scenarios found via TOAT are presented below.
4.4.1 Assessment for original parameters
Figure 7 shows the CDF and PDF of the damping ratio and the frequency of the SSO mode under the original parameters. The frequency is distributed from approximately 11.75 to 12 Hz, which is a narrow interval. Moreover, the damping ratio is tightly distributed around 0.45. This indicates that the mode is so strongly damped that SSO does not occur under these original parameters.

CDF and PDF of damping ratio and frequency of sub-synchronous mode under original parameters
4.4.2 Assessment of scenario with 1st set of parameters
By utilizing the 1st set of parameters in Table 2, we calculate the CDF and PDF of the damping ratio and the frequency of the SSO mode. The results are shown in Fig. 8.

CDF and PDF of damping ratio and frequency of sub-synchronous mode under the 1st group of parameters
It can be seen that the damping ratio is low enough. However, the frequency distribution interval, which is approximately (13 Hz, 14 Hz), is still narrow. This means that the frequency does not change greatly when the operating conditions of the system vary. For a scenario with a greater likelihood to match the actual accident, as discussed at the beginning of Section 4, the frequency should be distributed over a wide range. Therefore, this scenario may not match the actual accident.
4.4.3 Assessment of scenario with 2nd set of parameters
By utilizing the 2nd set of parameters, we calculate the CDF and PDF of the damping ratio and the frequency of the SSO mode. The results are shown in Fig. 9.

CDF and PDF of damping ratio and frequency of sub-synchronous mode under the 2nd group of parameters
It can be seen that the distribution range of the frequency is near 10 Hz and the damping ratio is distributed around 0. The probability of negative damping is near 68%. All of the aforementioned results indicate that this group of parameters has larger chance than the 1st group of parameters to match those in the Hami event.
5 Simulations
In this section, the PSCAD model of the DDWG provided by the manufacturer is utilized in a series of electromagnetic simulations to verify former results. First, the original parameters in the basic scenario (i.e., k) are taken, and the output power reference is set to vary from 0 to 0.05 p.u.. Then, the output current in the d-axis, the DC bus voltage, the output power, and the output current in phase A (denoted as id, udc, P, and ia, respectively) are as shown in Fig. 10. Prony analysis is performed on the transient process of id, revealing that the dominant mode is − 39.1 ± j75.3, which coincides with the eigen-analysis results in Table 1.

Variables under original control parameters
Then, the 2nd set of parameters in Table 2 is used—id and its reference idref—as shown in Fig. 11. Oscillation arises as soon as the DDWGs start to output power. Because idref reaches the hard limit, equiamplitude oscillation occurs. Measurement shows that the oscillation frequency is approximately 43.5 Hz, which matches the results in Table 2. The response of other relative variables are shown in Fig. 12. The harmonics are obvious in ia.

Output current in d-axis and its reference under different control parameters

Variables under different control parameters
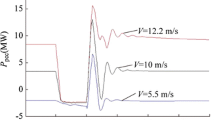
Finally, when the output power reference is changed to 0.1 p.u. and the number of grid-connected DDWGs is set as 300, the frequency of SSO becomes 39.51 Hz, as shown in Fig. 13.

Variables under different operating conditions
Figure 13 shows that the frequency changes significantly when the operating conditions of the wind farm vary.
6 Conclusion
A small signal state-space model of a DDWG-based wind farm connected to a grid is developed. TOAT is employed to identify several system scenarios in which SSO may occur. Then, a probability assessment method based on GMM is introduced for evaluating the chance that the selected SSO matches the actual Hami event.
Several conclusions are drawn:
-
1)
When the DDWG-based wind farm is connected to the grid, SSO may be generated by the farms. The TOAT helps to find different system scenarios that present SSO risk. The scenarios where the SSO modes have weaker damping under different operating conditions are more likely to be consistent with the actual accident.
-
2)
The randomness of the operating condition makes the frequency and damping ratio of the SSO mode have certain probability distributions, which can be calculated via the proposed probability assessment method. In different system scenarios, the distributions differ significantly, which can be used to quantitatively assess whether a system scenario has similar SSO mode fluctuation characteristics as the actual accident.
The SSO examined in this study may occur increasingly in the future grid because of the growing amount of power electronic devices that have inverters with similar control structures to DDWGs. Thus, the detection of the SSO is important and should be further studied.
References
Gautam D, Vittal V, Harbour T (2009) Impact of increased penetration of DFIG-based wind turbine generators on transient and small signal stability of power system. IEEE Trans Power Syst 24(3):1426–1434
Ullah NR, Thiringer T, Karlsson D (2007) Voltage and transient stability support by wind farms complying with the E. ON Netz grid code. IEEE Trans Power Syst 22(4):1647–1656
Gross LC (2010) Sub-synchronous grid conditions: new event, new problem, and new solutions. In: Proceedings of western protective relay conference, Spokane, USA, 19–21 October 2010, 19 pp
Wang L (2014) Time-domain analysis of SSR mechanism and research on novel damping control. Dissertation, Tsinghua University
Wang L, Xie X, Jiang Q et al (2015) Investigation of SSR in practical DFIG-based wind farms connected to a series-compensated power system. IEEE Trans Power Syst 30(5):2772–2779
IEEE Subsynchronous Resonance Working Group of the System Dynamic Performance Subcommittee Power System Engineering Committee (1985) Terms, definitions and symbols for subsynchronous oscillations. IEEE Trans Power Appar Syst 104(6):1326–1334
Li M, Yu Z, Xu T et al (2017) Study of complex oscillation caused by renewable energy integration and its solution. Power Syst Tech 41(4):1035–1042
Xie X, Wang L, He J et al (2017) Analysis of subsynchronous resonance/oscillation types in power systems. Power Syst Tech 41(4):1043–1049
Xie X, Liu H, He J et al (2016) Mechanism and characteristics of subsynchronous oscillation caused by the interaction between full-converter wind turbines and AC systems. Proc CSEE 36(9):2366–2372
Liu H, Xie X, He J et al (2017) Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks. IEEE Trans Power Syst 32(6):4708–4720
Wang H, Li Y, Li W et al (2017) Mechanism research of subsynchronous and supersynchronous oscillations caused by compound current loop of grid-connected inverter. Power Syst Tech 41(4):1061–1066
Alawasa KM, Mohamed YAI, Xu W (2013) Modeling, analysis, and suppression of the impact of full-scale wind-power converters on sub-synchronous damping. IEEE Syst J 7(4):700–712
Alawasa KM, Mohamed YAI, Xu W (2014) Active mitigation of subsynchronous interactions between PWM voltage-source converters and power networks. IEEE Trans Power Electron 29(1):121–134
Liu W, Jiang J (2017) Modeling and analysis for direct-drive permanent magnet synchronous wind turbine generator in sub-synchronous oscillation. Electr Mach Control Appl 44(1):97–103
Kundur P (1994) Power system stability and control. McGraw-Hill, New York
Sauer P, Pai MA (1998) Power system dynamics and stability. Prentice Hall, New Jersey
Peace GS (1993) Taguchi methods: a hand on approach. Addison Wesley, New Jersey
Wu Q (1978) On the optimality of orthogonal experimental design. Acta Mathematicae Applagatae Sinica 1(4):283–299
Orthogonal arrays (Taguchi designs). http://www.york.ac.uk/depts/maths/tables/orthogonal.htm. Accessed 8 September 2017
Ke D, Chung CY, Sun Y (2016) A novel probabilistic optimal power flow model with uncertain wind power generation described by customized gaussian mixture model. IEEE Trans Sustain Energy 7(1):200–212
Wang Z, Shen C, Liu F (2016) Probabilistic analysis of small signal stability for power systems with high penetration of wind generation. IEEE Trans Sustain Energy 7(3):1182–1193
Zhang Z, Sun Y, Gao D et al (2013) A versatile probability distribution model for wind power forecast errors and its application in economic dispatch. IEEE Trans Power Syst 28(3):3114–3125
Acknowledgments
This work was supported in part by National Natural Science Foundation of China (No. U1766206, No. 51677098, and No. 51621065).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date: 17 April 2018
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
AN, Z., SHEN, C., ZHENG, Z. et al. Scenario-based analysis and probability assessment of sub-synchronous oscillation caused by wind farms with direct-driven wind generators. J. Mod. Power Syst. Clean Energy 7, 243–253 (2019). https://doi.org/10.1007/s40565-018-0416-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-018-0416-2