
Abstract
An approach of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security is proposed in this paper. The problem brought on by the strong nonlinearity property of short circuit currents is solved with a linearization method based on the DC power flow. The model can be converted to a mixed-integer linear programming problem, realizing the optimization of planning model that considers the constraints of linearized short circuit currents and N-1 security. To compensate the error caused by the assumptions of DC power flow, the compensation factor is proposed. With this factor, an iterative algorithm that can compensate the linearization error is then presented. The case study based on the IEEE 118-bus system shows that the proposed model and approach can be utilized to: optimize the construction strategy of transmission lines; ensure the N-1 security of the network; and effectively limit the short circuit currents of the system.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Along with the continuous increase of installed generation capacity and load levels in power systems, the scale of the power grid needs expanding and the structure of the power network needs strengthening. Although transmission network expansion can improve transmission capacity and security of power grids, improper transmission network expansion planning may result in unreasonable structure of power grids, which leads to a dramatic increase of short circuit currents in power systems.
Up until now, the excess of short circuit currents has been quite a common problem in many regions [1–4]. For instance, in China, the installed generation capacity of Shanghai power grid and power interchange with external power grids are growing rapidly during these years, resulting in a significant increase in short circuit currents of 500 kV buses [5]. In Japan, 500 kV power networks form the backbone of the transmission system. The short circuit interrupting capacity is 63 or 50 kA generally. With the growth of the power grid scale, the capital region around Tokyo is faced with the problem of excessive short circuit currents [6]. In Iran, the short circuit currents level will exceed the capacity of existing circuit breakers as a result of installing two new generating stations by 2015 [7].
The continuous increase of short circuit currents threatens the security of power grids. A higher level of short circuit currents imposes a stricter requirement on electrical equipment in power systems. If the interrupting capacity is insufficient to effectively clear faults, the impact of faults may spread to wider areas, jeopardizing the security of the whole power system. Thus, how to limit short circuit currents of power systems in the planning phase has been an imperative and critical task for system operators.
In the past decades, how to reduce short circuit currents of power grids has been widely investigated [8–12]. Up to date, there are mainly three kinds of measures in limiting short circuit currents, i.e., to improve the structure of power grids, to optimize the operation of power systems and to deploy current limiting devices. Ref. [13] investigates the influence of zoning on short circuit currents and proposes the optimization model of the zonal operation in 220 kV power grids. Ref. [14] presents a decision method of operation schemes for limiting short circuit currents in regional grids. The effect of short circuit currents, transient voltage security and static power flow distribution are considered. In Ref. [15], the case study based on PSCAD verifies the calculation method of short circuit faults in an HVDC system. In addition, the various short circuit current sources with their corresponding faults are analyzed. In Ref. [16], a model for automatically allocating optimal current limiting devices in power systems is formulated. In this mixed-integer linear programming (MILP) model, integer variables are utilized to determine the discrete capacity of reactors. Ref. [17] establishes a model for configuring ultra-high voltage short circuit currents limiters with particle swarm optimization (PSO). The case study based on Guangdong Power Grid verifies the effectiveness of the proposed model and approach.
In existing literature, while incorporating N-1 constraints into transmission expansion models is common practice [18–22], embedding constraints of short circuit currents into transmission expansion planning models is not thoroughly discussed. Since short circuit currents have strong nonlinear relation with decision variables of candidate transmission lines, current power grid planning models have defects of heavy computational burden and low solution accuracy. In an actual power grid planning project, instead of embedding constraints in the grid planning model, short circuit currents are calculated after determining the power grid planning result. This is an open-loop approach in which short circuit currents are checked manually. Once the short circuit currents are excessive, the power grid planning result needs modifying according to artificial experience. The major drawback of this procedure is low efficiency and loss of optimality. Therefore, current power grid planning model can merely guarantee N-1 security. A model that can ensure both short circuit currents constraints and N-1 security needs investigating.
To this end, the major contributions of this paper are as follows:
1) A new transmission network expansion planning model with embedded constraints of short circuit currents and N-1 security is proposed in this paper. In this model, the constraints of short circuit currents are explicitly incorporated. Thus, the optimal planning results can not only satisfy N-1 security of transmission systems, but also limit the short circuit currents below the safety threshold.
2) By constructing an iterative process in calculating short circuit currents, the linearization method based on DC power flow is developed to reduce the nonlinearity brought on by short circuit currents. Hence, the transmission network expansion planning model is converted to an MILP problem, which can be efficiently optimized.
3) In order to compensate the error caused by the linearization method, the compensation factor is proposed. The compensation factor, in respect to accurate short circuit currents, is updated in each iteration.
The rest of this paper is organized as follows: In Section 2, the calculation method of short circuit currents is briefly introduced. In Section 3, the model of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security is proposed. In Section 4, the algorithm of optimizing the planning model is described. In Section 5, the IEEE 118-bus system is utilized to verify the accuracy and effectiveness of the proposed model and approach. Section 6 concludes.
2 Calculation of nodal three-phase short circuit currents
The most serious faults of power systems, i.e., three-phase short circuit faults, are considered in this paper. The relationship between short circuit currents and the interrupting capacity of a breaker is:
where I b is the breaking current of a circuit breaker; I SC is the maximal short circuit current allowed; and η f is the coefficient of aperiodic components, reflecting the influence of the aperiodic short circuit currents.
The faults of power systems can be effectively cleared, provided that the peak value of short circuit currents is limited below the interrupting capacity of circuit breakers. Therefore, nodal three-phase short circuit currents are selected as the metric. By limiting the short circuit currents below the safety threshold, the security of power systems is guaranteed.
Three assumptions are adopted in this paper in calculating three-phase short circuit currents: 1) Ignore the excitation circuit and off-nominal transformer tap ratio. 2) Neglect the influence of load. 3) The electromotive force of the system remains constant when short circuit faults happen.
When short circuit fault occurs at node f with transition impedance z f , there is current injection −I f at node f equivalently. Therefore, according to the superposition theorem, the voltage of any node i in the network is:
where the first term is the voltage of node i before fault occurrence, denoted by U i (0); and −Z if I f is the voltage component of node i merely contributed by the short circuit current.
If the short circuit fault occurs at node i, i.e., i = f, the voltage of node f will be:
where Z ff is the self-impedance of node f.
The boundary condition of the fault is:
I f can then be deduced below:
For metallic short circuit faults, the transition impedance is 0 and the short circuit current is:
The node voltages can be obtained by solving the power flow, and the self-impedance of each node can be acquired by computing the network impedance matrix, thereby calculating the nodal three-phase short circuit currents.
3 Model of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security
Distinguished from previous planning models [23–26], the objective of the transmission network expansion planning in this paper is minimizing construction costs while satisfying N-1 security and limiting the short circuit currents below the safety threshold in the meantime. Based on DC power flow, the assumptions of the planning model are [27]: (1) Neglect the resistance of transmission lines because the resistance is considerably less than the reactance in high voltage transmission networks. (2) The per unit values of the node voltages are approximately 1.0 and the phase angle difference between two nodes is roughly 0.
3.1 Objective function
The objective function is expressed in (7).
where A n is the set of candidate transmission lines; C l is the construction cost of transmission line l; and α l is the 0–1 decision variable determining whether transmission line will be constructed.
This objective function implies that the transmission network expansion planning is optimized in such a way that the power system will satisfy N-1 security, and the short circuit currents will be limited below the safety threshold with minimal construction costs.
3.2 Constraints
It is supposed that the output of each generator remains constant when a single transmission line from A n is the contingency. Therefore, all the scenarios share the same set of decision variables of candidate lines and continuous variables of generator outputs while each N-1 scenario has its own set of continuous variables of voltage phase angles and line power flows. The constraints of the planning model are listed as follows.
The constraint of active power outputs of generators is expressed as:
where N g is the set of generators; P Gi is the active power output of generator i; and \(P_{Gi}^{ \hbox{min} } ,\;P_{Gi}^{ \hbox{max} }\) are the minimum and maximum active power output of generator i, respectively.
The constraint of phase angles of node voltages is expressed in (9).
where θ ic is the phase angle of the voltage at node i when line c is the contingency; \(\theta_{Gi}^{ \hbox{min} } ,\;\theta_{Gi}^{ \hbox{max} }\) are the minimum and maximum voltage phase angle at node i, respectively; N is the set of all the nodes in the power system; and A N-1 is the N-1 contingency set.
The constraint of the power balance of each node is expressed as:
where F ic is the active power on line j when line c is the contingency, and P Di is the load at node i.
The constraint of DC power flow equations of existing lines is expressed as:
where B ij is the mutual admittance between node i and node j; and δ c is a 0–1 variable representing the state of line c, i.e., δ c = 0 indicates line c operates normally, while δ c = 1 indicates line c is the contingency.
The constraint of transmission capacity of existing lines is expressed as:
where F min l , F max l are the minimum and maximum active power of line l, respectively.
The constraints of DC power flow equations of candidate lines are expressed as:
where M is a constant that is greater than B ij (θ max n − θ min n ).
The constraint of transmission capacity of candidate lines is expressed as:
The constraint of the number of transmission lines that can be constructed is expressed as:
where N l is the upper limit of the number of transmission lines that can be constructed.
The constraint of three-phase short circuit currents is expressed as:
where I SC i (·) is the expression of the short circuit current at node i; N A is the number of candidate transmission lines; I SCmax is the safety threshold of short circuit currents of the system; and K C i is the compensation factor of the short circuit current at node i, used for reducing the error caused by the linearization. Compensation factors are determined by the topological structure of the power system, which is defined below:
where I SCDC i , I SCAC i are the short circuit current at node i based on DC power flow and that based on AC power flow, respectively, and I SCAC i is the accurate short circuit current.
There are errors between accurate short circuit currents and those based on DC power flow. The errors originate from two aspects: 1) The voltage of each node is approximately 1.0 based on DC power flow, however, it is actually not the case in practice. 2) The resistances of transmission lines are ignored according to the assumptions of DC power flow. The errors brought on by DC power flow may lead to a suboptimal planning result. Thus, compensation factors, which are considered in the model, are needed to reduce the error caused by DC power flow in each iteration.
Therefore, (7) is the objective function and (8)–(17) are the constraints in the planning model.
According to the calculation method of short circuit currents mentioned in Section 2, the three-phase short circuit currents are reciprocals of self-impedances. The impedance matrix can be derived from the admittance matrix after inversion. Although the admittance matrix is the linear expression of decision variables of candidate transmission lines, however, self-impedances of the impedance matrix have strong nonlinearity property with cross-multiplying terms of decision variables in both denominators and numerators. Therefore, this calculation method makes the planning model a complex mixed-integer nonlinear programming (MINLP) problem. Since it is a difficult task to solve the planning model, a specific method for linearizing short circuit currents will be proposed in Section 4.
4 The algorithm
Since the short circuit currents have strong nonlinearity, the model needs to be linearized in order to be efficiently solved, i.e., the MINLP will be transformed to MILP after linearization. Therefore, the linearization method of short circuit currents is proposed in this paper. Based on DC power flow, the voltage of node i is 1.0 per unit and the three-phase short circuit current at node i is:
The nonlinearity of the short circuit current is derived from the reciprocal of self-impedance. If it is possible to directly deduce the functional relationship between short circuit currents and the elements in the admittance matrix, the nonlinearity of short circuit currents expressions will be significantly reduced. Based on the property that the admittance matrix and the impedance matrix are inverse matrices, (20) can be directly derived from (19), as follows.
where Y i is the admittance of node i against the ground, and Z ji is the mutual impedance between node j and node i.
On the premise of DC power flow, the initial voltage of each node in the power system is 1.0 per unit, i.e., U i (0) = 1.0, i ∈ N. Thus, the value 1.0 can be interpreted as the initial voltage of node i, U i (0). Then the short circuit current at node i can be denoted by:
where U i (0)Y i is the short circuit current contribution of the voltage source at node i; U j (0) − I SC i Z ji is the voltage of node j after three-phase short circuit faults occur at node i; (U j (0) − I SC i Z ji )Y ij is the short circuit current contribution of the voltage source at node j. Therefore, the physical meaning of (21) is that the short circuit current of node i is the sum of contributions from the equivalent voltage source of each node.
Since the short circuit current appears on both the left-hand-side and right-hand-side of (21), to realize the linearization, the iterative expression of short circuit currents calculation is used instead:
where k is the index of iterations. Since decision variables α l determine whether candidate transmission lines will be constructed, Y ij is the linear expression of decision variables α l . Y i , the admittance of node i against the ground, can be expressed as the linear combination of decision variables α l as well. Therefore, Y ij and Y i are linear expressions of decision variables of candidate transmission lines. I SC(k) and Z (k) are constants, which are calculated according to the system topology in the kth iteration. Hence, the linear expressions of I SC(k+1) are obtained, serving as linear constraints embedded in the planning model, as shown in (17). I SC(k+1) is updated in each iteration until the convergence is achieved, i.e., I SC(k+1) = I SC(k).
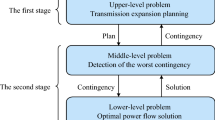
The algorithm of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security is shown in Fig. 1.

Algorithm of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security
According to Fig. 1, the algorithm is elaborated as follows.
1) Initialize the index of iteration k and optimize the transmission network expansion planning model merely with embedded N-1 security constraints.
2) Check the short circuit currents of each node under the planning result of 1). If the currents are already limited below the safety threshold, the algorithm terminates. Otherwise, go to 3).
3) Calculate the short circuit currents of each node based on DCPF and ACPF under the planning result of 1), denoted by I SCDC(k) and I SCAC(k), respectively.
4) In the light of (18), calculate compensation factors, denoted by K c(k).
5) After computing the impedance matrix Z (k), the linear expressions of short circuit currents I SC(k+1) can be obtained via (22).
6) Add I SC(k+1) into the planning model and optimize the transmission network expansion planning model with embedded constraints of short circuit currents and N-1 security.
7) Check whether the present planning result is identical to the previous one. If they are identical, the algorithm terminates. Otherwise, k = k + 1 and go to 3).
In this way, linear constraints of short circuit currents can be embedded into the transmission network expansion model.
5 Case study
The testing environment is LENOVO Y410P, 2.40 GHz, eight core. The program is developed using MATLAB R2013a. The mathematical optimization solver is CPLEX 12.4 [28].
The case study is based on the IEEE 118-bus system, with 179 transmission lines and 54 generating units. The level of short circuit currents of the power system before expansion planning is shown in Fig. 2, where the safety threshold of short circuit currents is 30 per unit. According to the results shown in Fig. 2, the initial power system satisfies the constraints of short circuit currents. However, with the increase of load levels, some transmission lines may be heavy loaded or even overloaded when a single line is the contingency, i.e., the power system cannot meet the requirement of N-1 security.

Level of short circuit currents of the IEEE 118-bus system
In order to enhance the structure of the power grid, there are 22 transmission lines in A n : 1-3, 23-24, 9-10, 25-26, 35-37, 34-36, 26-30, 21-22, 43-44, 54-56, 47-69, 49-69, 24-70, 71-73, 75-77, 86-87, 110-111, 110-112, 68-116, 12-117, 6-7, and 7-12.
The optimization results of transmission network expansion planning with embedded N-1 security constraints and with embedded constraints of short circuit currents and N-1 security will be analyzed below. For convenience, M0 is used to represent the power system before expansion planning. M1 represents the power system after transmission network expansion planning with embedded N-1 security constraints. M2 represents the power system after transmission network expansion planning with embedded constraints of both short circuit currents and N-1 security.
5.1 Result of transmission network expansion planning
The upper limit of the number of transmission lines that can be constructed is 14. Run the program and the elapsed time is 47.54 s. Table 1 shows the results of M1 and M2. There are 8 newly-built transmission lines in both results. Where 1 indicates that the transmission line will be constructed while 0 means that the transmission line will not be constructed.
The maximum of line power flows in the results of M0 and M2 when a single line is the contingency is compared in Fig. 3.

Maximum of line power flows in the results of M0 and M2 when a single line is the contingency
It is worth mentioning that there are two power flow dips in the result of M2, which are the operation conditions when No.176 line and No.186 line are the contingencies, respectively. The reason is that two lines are parallel, leading to the impedances of these two parallel lines considerably smaller than that of lines around. When the power system operates normally or other lines are the contingencies, large amount of active power tends to flow on these two lines. However, when these two lines are the contingencies, large amount of active power is distributed on other lines, thereby reducing the maximum of line power flows.
According to the results shown in Fig. 3, some transmission lines will be overloaded when a single line is the contingency before expansion planning. After transmission network planning, 8 more transmission lines will be constructed, which strengthens the structure of the power grid and improves the transmission capacity of the power system, making the system satisfy N-1 security constraints.
5.2 Level of short circuit currents
Since the level of short circuit currents is not restricted in M1, the result of M1 cannot guarantee that the short circuit currents are limited below the safety threshold. However, there are constraints of both short circuit currents and N-1 security in M2, so the short circuit currents cannot exceed the threshold in the result of M2. The levels of short circuit currents of the results of M1 and M2 are compared in Fig. 4.

Levels of short circuit currents of the results of M1 and M2 based on ACPF
According to the results shown in Fig. 4, the short circuit currents of the result of M1 exceed the safety threshold, which further indicates that unreasonable transmission network expansion planning cannot ensure that short circuit currents are below the safety threshold.
As one can observe from Fig. 3 and Fig. 4, the result of M2 can not only ensure N-1 security of the power system, but also limit the short circuit currents below the safety threshold, realizing transmission network expansion planning with embedded constraints of short circuit currents and N-1 security.
5.3 Summary
According to the case study, the planning result of M2 is superior to that of M1. This verifies that the model and approach of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security proposed in this paper can be utilized to guarantee N-1 security of the power system and limit the short circuit currents below the safety threshold as well, achieving both security and economy of the power system planning.
6 Conclusion
An approach of transmission network expansion planning with embedded constraints of short circuit currents and N-1 security is proposed in this paper. The model, based on DC power flow, is established for transmission network expansion planning. By means of an iterative process, the linearization of short circuit currents is realized. According to the AC power flow, the error of short circuit currents caused by linearization is reduced by compensation factors. The case study shows that it can be achieved via the proposed approach that N-1 security is satisfied and short circuit currents are limited below the safety threshold after expansion planning. Hopefully, the proposed approach could provide new thought for power system transmission planning.
References
Dan SH (2010) The problem emerging in developing the huge power system. In: Proceedings of the 2010 Asia-Pacific power and energy engineering conference (APPEEC’10), Chengdu, China, 28–31 Mar 2010, 3 pp
Sun MJ, Lin YF, Guo YY (2011) The study of power system performances in the fast short circuit current limiter embedded network. In: Proceedings of the 10th international conference on environment and electrical engineering (EEEIC’11), Rome, Italy, 8–11 May 2011, 4 pp
Liang JF, Liu WY, Li Y et al (2011) Effection on short-circuit current limit of 500 kV autotransformer neutral grounding via small reactance. In: Proceedings of the 2011 Asia-Pacific power and energy engineering conference (APPEEC’11), Wuhan, China, 25–28 Mar 2011, 4 pp
Oprea L, Popescu V (2008) Challenges and methodologies in transmission planning for mega-cities. In: Proceedings of the 14th IEEE Mediterranean electrotechnical conference (MELECON’08), Ajaccio, France, 5–7 May 2008, pp 726–731
Ruan QT (2005) Present situation of short circuit current control in Shanghai power grid and countermeasures. Power Syst Technol 29(2):78–83 (in Chinese)
Qi XM, Song P (2010) Reference and revelation of short-circuit current limitation technology in Japan to East China Power Grid. East China Electr Power 38(10):1640–1644 (in Chinese)
Golshani A, Khakpour A, Hofmann L (2012) Facts based fault current limiter utilization in HV grid. In: Proceedings of the 25th IEEE Canadian conference on electrical and computer engineering (CCECE’12), Montreal, Canada, 29 Apr–2 Mar, 2012, 6 pp
Chen LL, Huang MX, Wu JY et al (2010) An optimal strategy for short circuit current limiter deployment. In: Proceedings of the 2010 Asia-Pacific power and energy engineering conference (APPEEC’10), Chengdu, China, 28–31 Mar 2010, 4 pp
Zhang C, Zheng JC, Hou ZG et al (2012) Application of multi-level spark gaps in resonant-type fault current limiter. In: Proceedings of the 2012 annual report conference on electrical insulation and dielectric phenomena (CEIDP’12), Montreal, Canada, 14–17 Oct 2012, pp 420–423
Kanlaya P, Hoonchareon N (2013) Combined bus splitting and line bypassing for short-circuit currents limitation. In: Proceedings of the 10th international conference on electrical engineering/electronics, computer, telecommunications and information technology (ECTI-CON’13), Krabi, Thailand, 15–17 May 2013, 6 pp
Namchoat S, Hoonchareon N (2013) Optimal bus splitting for short-circuit current limitation in metropolitan area. In: Proceedings of the 10th international conference on electrical engineering/electronics, computer, telecommunications and information technology (ECTI-CON’13), Krabi, Thailand, 15–17 May 2013, 5 pp
Poltanov AE, Glinov AP, Kondratenko AK et al (2001) Use of multi-turn railguns as high-speed limiters of short-circuit current for large power plants. IEEE Trans Magn 37(1–1):229–231
Xu X, Ding T, Wan QL (2009) 220 kV power grid district-dividing optimization for limiting fault current. Automat Electr Power Syst 33(22):98–101 (in Chinese)
Yang D, Liu YT, Niu XS (2010) Integrated decision method of operation schemes for limiting short-circuit currents in district grids. Autom Electr Power Syst 34(12):34–38 (in Chinese)
Wasserrab A, Balzer G (2012) Evaluation of short circuit currents in multi-terminal HVDC systems. In: Proceedings of the 2012 international conference and exposition on electrical and power engineering (EPE’12), Iasi, Romania, 25–27 Oct 2012, pp 213–218
Chen LL, Huang MX, Zhang H et al (2009) An optimization strategy for limiting short circuit current. Autom Electr Power Syst 33(11):38–42 (in Chinese)
Ying LZ, Wang JQ, Chen X et al (2012) An optimal configuration scheme for ultra-high voltage short-circuit current limiter in Guangdong Power Grid. Autom Electr Power Syst 36(4): 96–100, 113 (in Chinese)
Asadamongkol S, Eua-arporn B (2009) Transmission system expansion planning with consideration of N-1 security constraints. In: Proceedings of the 6th international conference on electrical engineering/electronics, computer, telecommunications and information technology (ECTI-CON’09), vol 1, Pattaya, Thailand, 6–9 May 2009, pp 218–221
Huang W, Feng L, He ZJ et al (2011) Transmission network planning with N-1 security criterion based on improved multi-objective genetic algorithm. In: Proceedings of the 4th international conference on electric utility deregulation and restructuring and power technologies (DRPT’11), Weihai, China, 6–9 July 2011, pp 1250–1254
Hu ZC, Li FR (2010) Network expansion planning considering N-1 security criterion by iterative mixed-integer programming approach. In: Proceedings of the 2010 IEEE Power and Energy Society general meeting, Minneapolis, MN, USA, 25–29 July 2010, 6 pp
Xia Q, Xu GX, Kang CQ (2009) Planning of anti-disaster power system. Power Syst Technol 33(3):1–7 (in Chinese)
Xu GX, Xia Q, Kang CQ (2010) Research on mode and model of anti-disaster transmission network expansion planning. Autom Electr Power Syst 34(3):17–21 (in Chinese)
Khodaei A, Shahidehpour M, Kamalinia S (2010) Transmission switching in expansion planning. IEEE Trans Power Syst 25(3):1722–1733
Sarfati M, Galland O, Hesamzadeh MR (2013) Transmission planning with probabilistic modeling of multiple contingencies. In: Proceedings of the 10th international conference on European energy market (EEM’13), Stockholm, Sweden, 27–31 May 2013, 6 pp
Choi, J, Cha J, Watada J et al (2007) Transmission system expansion planning considering outage cost. In: Proceedings of the 2nd international conference on innovative computing, information and control (ICICIC’07), Kumamoto, Japan, 5–7 Sept 2007, 381 pp
Gu Y, Ni M, Bo R (2012) Transmission expansion planning considering economic and reliability criteria. In: Proceedings of the 2012 IEEE Power and Energy Society general meeting, San Diego, CA, USA, 22–26 July 2012, 8 pp
Wang XF, Song YH, Irving M (2008) Modern power systems analysis. Springer, Boston
IBM ILOG CPLEX (2011) http://www-01.ibm.com/software/websphere/products/optimization/academic-initiative/index.html.
Acknowledgments
This work was supported by National Key Technology R&D Program of China (No. 2013BAA01B02) and National Natural Science Foundation of China (Nos. 51325702, 51407100).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date: 13 April 2015
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
WANG, J., ZHONG, H., XIA, Q. et al. Transmission network expansion planning with embedded constraints of short circuit currents and N-1 security. J. Mod. Power Syst. Clean Energy 3, 312–320 (2015). https://doi.org/10.1007/s40565-015-0137-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-015-0137-8