
Abstract
We propose a reliable technique based on Adomian decomposition method (ADM) for the numerical solution of fourth-order boundary value problems for Volterra integro-differential equations. We use Green’s function technique to convert boundary value problem into the integral equation before establishing the recursive scheme for the solution components of a specific solution. The advantage of the proposed technique over the standard ADM or modified ADM is that it provides not only better numerical results but also avoids solving a sequence of transcendental equations for unknown constant. Approximations of the solutions are obtained in the form of series. Convergence and error analysis is also discussed. The accuracy and generality of the proposed scheme are demonstrated by solving some numerical examples.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Consider the following class of fourth-order BVPs for Volterra IDEs [1–5]
with the boundary conditions
where \(\alpha _{i},i=1,2,3,4\) are any finite real constants, \(g(x)\in C[0,b]\), and \(K(x,t)\in C([0,b]\times [0,b])\). The IDEs are often involved in the mathematical formulation of physical and engineering phenomena [4–6]. In general, the IDEs with given boundary conditions are difficult to solve analytically. Therefore, these problems must be solved by various approximation and numerical methods. The existence and uniqueness of solutions for such problems can be found in [1].
There is considerable literature on the numerical-approximate treatment of the BVPs for IDEs, for example, the compact finite difference method [7], monotone iterative methods [7, 8], spline collocation method [9], the method of upper and lower solution [10], Haar wavelets [11], and pseudo-spectral method [12]. Though, these numerical techniques have many advantages, a huge amount of computational work is involved that combines some root-finding techniques to obtain an accurate numerical solution especially for nonlinear problems.
Recently, some newly developed semi-numerical methods have also been applied to solve BVPs for IDEs such as, ADM [3], homotopy perturbation method (HPM) [4], and homotopy analysis method (HAM) [13]. In [5], the variational iteration method (VIM) was also used for solving the problem (1)–(2). However, in [14] Wazwaz pointed out that VIM gives good approximations only when the problem is linear or nonlinear with the weak nonlinearity of the form (\(y^{n}, yy',y'^{n},\ldots )\), but the VIM suffers when the nonlinearity is of the form \(( e^{y}, \ln y, \sin y,\ldots )\) (for details see [14]).
It is well known that the ADM allows us to solve nonlinear BVPs without restrictive assumptions such as linearization, discretization and perturbation. Many researchers [14–23] have shown interest to study the ADM for different scientific models. According to the ADM, we rewrite the problem (1) in an operator form
where \(L=\frac{{\rm d}^4}{{\rm d}x^4}\) is a fourth-order linear differential operator, g is a function of x and \(Ny=\int \nolimits _{0}^{x} K(x,t) f(y(t)){\rm d}t\) is a nonlinear term. Inverse integral operator is usually defined as
Operating with \(L^{-1}\) on both sides of (3) and using the conditions \(y(0)=\alpha _1\) and \(y'(0)=\alpha _2\), we obtain
where \(c_1=\frac{y''(0)}{2!}\) and \(c_2=\frac{y'''(0)}{3!}\) are unknown constants to be determined.
The ADM relies on decomposing y by a series of components and nonlinear term f(y) by a series of Adomian polynomials as
where \(A_j\) are Adomian’s polynomials [22], which can be computed as
Several algorithms have also been given to generate the Adomian polynomial rapidly in [24–26]. Substituting the series (6) in (5), we get
On comparing both sides of equation (8), the ADM is given by
Wazwaz [27] suggested a modified ADM (MADM) which is given by
Hence, the n-term approximate series solution is obtained as
We note that the series solution \(\phi _n(x,c_1,c_2)\) depends on the unknown constants \(c_1\) and \(c_2\). These unknown constants will be determined approximately by imposing the boundary condition at \(x=b\) on \(\phi _n(x,c_1,c_2)\), which leads a sequence of nonlinear system of equations as
To determine the unknown constants \(c_1\) and \(c_2\), we require root finding methods such as Newton–Raphson’s method which requires additional computational work. But solving the nonlinear equation (12) for \(c_1\) and \(c_2\) is a difficult task in general. Moreover, in some cases the unknowns \(c_1\) and \(c_2\) may not be uniquely determined. This may be the main difficulty of the ADM.
In this work, we propose a new recursive scheme which does not involve any unknown constant to be determined. In other words, we introduce a modification of the ADM to overcome the difficulties occurring in ADM or MADM for solving fourth-order BVPs for IDEs.
The decomposition method with Green’s function
Let us first consider homogeneous version of the problem (1) and (2) as
Solving (13) analytically, we obtain
We now construct Green’s function of the following fourth-order boundary value problem
The Green’s function of (15) can be easily constructed and it is given by
Using (14) and (16), we transform BVPs for IDEs (1) and (2) into an integral equation as
Substituting the series (6) in (17), we obtain
Comparing both sides of (18), the decomposition with Green’s function (DMGF) is given by the following recursive scheme as
and the modified decomposition with Green’s function (MDMGF) is given by the following recursive scheme as
where \(u_0=\alpha _1\) and \(u_1=\alpha _2 x - \frac{\left( 3 \alpha _1+2 b \alpha _2-3 \alpha _3+b \alpha _4\right) }{b^2} x^2 +\frac{ \left( 2 \alpha _1+b \alpha _2-2 \alpha _3+b \alpha _4\right) }{b^3}x^3\). The n-terms truncated series solution is obtained as
Convergence and error estimate of the scheme (19) or (20)
In this section, we shall show that sequence \(\{\psi _n\}\) of the partial sums of series solution defined by (21) converges to the exact solution y of the problem (1), (2).
Theorem 3.1
(Convergence theorem) Suppose that \(\mathbb {X}=C[0,b]\) is a Banach space with the norm \(\Vert y\Vert = \max _{ x\in I= [0,b]}|y(x)|,\ y\in \mathbb {X}\). Assume that the function f(y) satisfies the Lipschitz condition such that \(|f(y)-f(y^{*})|\le l|y-y^{*}|\) and denote \(\Vert K\Vert _{\infty }=\displaystyle \max |K(\xi ,t)|\) and \(\Vert G\Vert _{\infty }=\displaystyle \max |G(x,\xi )|.\) Further, we define \(\delta \) as \( \delta :=l \Vert K\Vert _{\infty }\Vert G\Vert _{\infty } b^2.\) Then the sequence \(\{\psi _n\}\) converges to the exact solution whenever \(\delta <1\) and \(\Vert y_1\Vert <\infty \).
Proof
From (19) or (20) and (21), we write
For all \(n,m\in \mathbb {N}\), with \(n>m\), consider
Using the relation \(\sum _{j=0}^{n} A_{j}\le f(\psi _{n})\) (for details see, [28, pp 944–945]) we have
where \(\delta =l \Vert K\Vert _{\infty }\Vert G\Vert _{\infty } b^2\).
Setting \(n=m+1\) we obtain \(\Vert \psi _{m+1}-\psi _{m}\Vert \le \delta \Vert \psi _{m}-\psi _{m-1}\Vert .\) Thus, we have \(\Vert \psi _{m+1}-\psi _{m}\Vert \le \delta \Vert \psi _{m}-\psi _{m-1}\Vert \le \delta ^{2} \Vert \psi _{m-1}-\psi _{m-2}\Vert \le \cdots \le \delta ^{m} \Vert \psi _{1}-\psi _{0}\Vert .\) Using triangle inequality for any \(n,m\in \mathbb {N}\), with \(n>m\) we have
Thus, we obtain
which converges to zero, i.e., \(\Vert \psi _{n}-\psi _{m}\Vert \rightarrow 0\), as \(m\rightarrow \infty \). This implies that there exits an \(\psi \) such that \(\lim _{n\rightarrow \infty } \psi _{n}=\psi \). \(\square \)
In the next theorem, we give the error estimate of the series solution.
Theorem 3.2
(Error estimate) The maximum absolute truncation error of the series \(\psi _m\) obtained by the scheme (19) or (20) to problem is given as
where \(\Vert A_0\Vert _{\infty }=\max _{ x\in I}|A_0|\), \(A_0=f(y_0)\).
Proof
Fixing m and letting \(n\rightarrow \infty \) in the estimate (23) with \(n\ge m\), we obtain
From the scheme (19) we have \(y_1=\int \nolimits _{0}^{b}G(x,\xi ) \big \{\int \nolimits _{0}^{\xi } K(\xi ,t) A_{0} {\rm d}t \big \}{\rm d}\xi \), and following the steps of theorem (3.1), we have
But we know that \(\delta =l\Vert K\Vert _{\infty }\Vert G\Vert _{\infty } b^2\). Hence, the inequality (26) becomes
Combining the estimates (25) and (27), we get the desired result. \(\square \)
Numerical results
To demonstrate the efficiency and accuracy of the proposed recursive schemes, we consider four fourth-order BVPs for Volterra IDEs. All symbolic and numerical computations are performed using ‘Mathematica’ 8.0 software package.
Example 4.1
Consider the following linear fourth-order BVP for Volterra IDE [2, 3]
where \(g(x)=-x+5 e^x-1\), and its exact solution is \(y(x)=1+x e^{x}\).
Here, \(b=1\), \(\alpha _1=1\), \(\alpha _2=1\), \(\alpha _3=1+e\), \(\alpha _4=2e\), \(K(x,t)=1\), \(f(y)=y\), and \(g(\xi )=-\xi +5 e^\xi -1\). According to the MDMGF (20), the problem (28) is transformed into the following recursive scheme
\(G(x,\xi )\) is given by
Using (29) and (30), we compute the solution components \(y_j\) as
To check the accuracy and efficiency of the proposed methods, the absolute error function is defined as
where y is the exact solution and \(\psi _n\) is the nth-stage approximation obtained by the proposed (19) or (20).
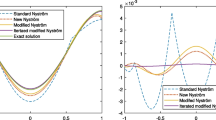
In Table 1, we list the numerical results of the absolute errors \(|\psi _n-y|\) (obtained by the proposed MDMGF (20) [27]) and \(|\phi _n-y|\) [obtained by the existing MADM (10)] for \(n=1,2,3\). It is observed that the proposed MDMGF provides not only better numerical results but also avoids solving a sequence of transcendental equations for unknown constant.

Plots of the exact and the approximate solution of Example 4.1
In Fig. 1, we plot the exact solution y and the approximate solution \(\psi _1=y_0+y_1\). We observe that only two-term approximations \(\psi _1=y_0+y_1\) coincide with the exact solution y.
Example 4.2
Consider the following nonlinear fourth-order BVPs for Volterra IDE [3]
where \(g(x)=1\). The exact solution is \(y(x)={\rm e}^{x}\).
Here, \(b=1\), \(\alpha _1=1\), \(\alpha _2=1\), \(\alpha _3=e\), \(\alpha _4=e\), \(K(x,t)={\rm e}^{-t}\), and \(f(y)=y^{2}(t).\) In view of the MDMGF (20), we transform the problem (31) into the following recursive scheme
where \(g(\xi )=1\) and \(G(x,\xi )\) is given by the Eq. (30). The Adomian’s polynomial \(f(y)=y^{2}\) are obtained as
Using (32) and (33), we obtain the solution components \(y_j\) as

Plots of the exact and the approximate solution of Example 4.2
In Table 2, we present the numerical results of the absolute errors \(|\psi _n-y|\) (obtained by the proposed MDMGF) and \(|\phi _n-y|\) (obtained by MADM) for \(n=1,2,3\). It is observed that the proposed DMGF provides not only better numerical results but also avoids solving a sequence of transcendental equations for unknown constant. In Fig. 2, the exact solution y and the approximate solution \(\psi _1\) are plotted. From this figure, we observe that only two-term approximations \(\psi _1\) coincide with the exact one.
Example 4.3
Consider the following nonlinear fourth-order BVPs for Volterra IDE
where \(g(x)=-\frac{x^2}{2}-4 x-\frac{6}{(x+4)^4}\). The exact solution is \(y(x)=\ln (4+x)\).
Here, we have \(b=1\), \(\alpha _1=\ln (4)\), \(\alpha _2=\frac{1}{4}\), \(\alpha _3=\ln (5)\), \(\alpha _4=\frac{1}{5}\) , \(K(x,t)=1\), and \(f(y)={\rm e}^{y(t)}.\) According to the MDMGF (20), the problem (34) is transformed into the following recursive scheme
where \(g(\xi )=-\frac{\xi ^2}{2}-4 \xi -\frac{6}{(\xi +4)^4}\) and \(G(x,\xi )\) is given by the Eq. (30). The Adomian’s polynomials for \(f(y)={\rm e}^{y(x)}\) are calculated as
Using (35) and (36), we obtain the components \(y_j\) as

Plots of the exact and the approximate solution of Example 4.3
In Table 3, we present the numerical results of the absolute errors \(|\psi _n-y|\) (obtained by the proposed MDMGF) and \(|\phi _n-y|\) (obtained by MADM) for \(n=1,2,3\). In this case, we also observe the same trend as was observed in last two examples that the proposed MDMGF gives better numerical results. Moreover, the curves of the exact solution y and the approximate solution \(\psi _1\) are plotted in Fig. 3. We observe that only two-term approximations \(\psi _1\) and the exact solution overlap each other.
Example 4.4
Consider the following nonlinear fourth-order BVPs for IDEs
where \(g(x)= -\frac{x^2}{2}-x-\frac{6}{(x+1)^4}\). The exact solution is \(y(x)=\ln (1+x)\).
Here, \(b=1\), \(\alpha _1=0\), \(\alpha _2=1\), \(\alpha _3=\ln (2)\), \(\alpha _4=\frac{1}{2}\), \(K(x,t)=1\), and \(f(y)={\rm e}^{y(t)}.\) According to MDMGF (20), we transform the problem (37) into the following recursive scheme as
where \(g(\xi )= -\frac{\xi ^2}{2}-\xi -\frac{6}{(\xi +1)^4}\). Using (36) and (38), we obtain the solution components \(y_j\) as

Plots of the exact and the approximate solution of Example 4.4
In Table 4, we present the numerical results of the absolute errors \(|\psi _n-y|\) (obtained by the proposed DMGF) and \(|\phi _n-y|\) (obtained by MADM) for \(n=1,2,3\). We also plot the curves of the exact y and the approximate solution \(\psi _1\) for \(n=1\) in Fig. 4. Like previous examples, it is observed that only two-term approximations \(\psi _1\) coincide with the exact solution y.
Conclusions
In this paper, we studied a reliable technique based on the decomposition method and Green’s function for the numerical solution of the fourth-order BVPs for Volterra IDEs. The technique depends on constructing Green’s function before establishing the recursive scheme for the solution components. The proposed technique provides a direct recursive scheme for obtaining the approximations to the solutions of BVPs. Unlike the existing ADM or the MADM, the proposed method DMGF or MDMGF avoids unnecessary evaluation of unknown constants and provides better numerical solutions. Convergence and error analysis of the proposed technique have also been discussed. The performance of the proposed recursive scheme have been examined by solving four numerical examples. It has been shown that only two-term series solution is enough to obtain an accurate approximation to the solution.
References
Agarwal, R.P.: Boundary value problems for higher order integro-differential equations. Nonlinear Anal.: Theory Methods Appl. 7(3), 259–270 (1983)
Hashim, I.: Adomian decomposition method for solving BVPs for fourth-order integro-differential equations. J. Comput. Appl. Math. 193(2), 658–664 (2006)
Wazwaz, A.M.: A reliable algorithm for solving boundary value problems for higher-order integro-differential equations. Appl. Math. Comput. 118(2), 327–342 (2001)
Yıldırım, A.: Solution of BVPs for fourth-order integro-differential equations by using homotopy perturbation method. Comput. Math. Appl. 56(12), 3175–3180 (2008)
Sweilam, N.: Fourth order integro-differential equations using variational iteration method. Comput. Math. Appl. 54(7), 1086–1091 (2007)
Wazwaz, A.M.: A comparison study between the modified decomposition method and the traditional methods for solving nonlinear integral equations. Appl. Math. Comput. 181(2), 1703–1712 (2006)
Zhao, J., Corless, R.M.: Compact finite difference method for integro-differential equations. Appl. Math. Comput. 177(1), 271–288 (2006)
Al-Mdallal, Q.M.: Monotone iterative sequences for nonlinear integro-differential equations of second order. Nonlinear Anal.: Real World Appl. 12(6), 3665–3673 (2011)
Brunner, H.: On the numerical solution of nonlinear Volterra integro-differential equations. BIT Numer. Math. 13(4), 381–390 (1973)
Liz, E., Nieto, J.J.: Boundary value problems for second order integro-differential equations of Fredholm type. J. Comput. Appl. Math. 72(2), 215–225 (1996)
Lepik, Ü.: Haar wavelet method for nonlinear integro-differential equations. Appl. Math. Comput. 176(1), 324–333 (2006)
Sweilam, N.H., Khader, M.M., Kota, W.: Numerical and analytical study for fourth-order integro-differential equations using a pseudospectral method. Math. Probl. Eng. 2013, 1–7 (2013). doi:10.1155/2013/434753
Saeidy, M., Matinfar, M., Vahidi, J.: Analytical solution of BVPs for fourth-order integro-differential equations by using homotopy analysis method. Int. J. Nonlinear Sci. 9(4), 414–421 (2010)
Wazwaz, A.M., Rach, R.: Comparison of the Adomian decomposition method and the variational iteration method for solving the Lane-Emden equations of the first and second kinds. Kybernetes 40(9/10), 1305–1318 (2011)
Singh, R., Kumar, J., Nelakanti, G.: Approximate series solution of singular boundary value problems with derivative dependence using Green’s function technique. Comput. Appl. Math. 33(2), 451–467 (2014)
Singh, R., Kumar, J.: The Adomian decomposition method with Green’s function for solving nonlinear singular boundary value problems. J. Appl. Math. Comput. 44(1), 397–416 (2014)
Al-Hayani, W.: Adomian decomposition method with Green’s function for solving tenth-order boundary value problems. Appl. Math. 5, 1437–1447 (2014)
Al-Hayani, W.: Adomian decomposition method with Green’s function for solving twelfth-order boundary value problems. Appl. Math. Sci. 9(8), 353–368 (2015)
Singh, R., Kumar, J., Nelakanti, G.: Numerical solution of singular boundary value problems using Green’s function and improved decomposition method. J. Appl. Math. Comput. 43(1), 409–425 (2013)
Wazwaz, A.M.: The combined Laplace transform-Adomian decomposition method for handling nonlinear Volterra integro-differential equations. Appl. Math. Comput. 216(4), 1304–1309 (2010)
Wazwaz, A.M.: A reliable study for extensions of the Bratu’s problem with boundary conditions. Math. Methods Appl. Sci. 35(7), 845–856 (2012)
Adomian, G., Rach, R.: Inversion of nonlinear stochastic operators. J. Math. Anal. Appl. 91(1), 39–46 (1983)
Adomian, G.: Solving Frontier Problems of Physics: The Decomposition Method. Kluwer Academic Publishers, Boston (1994)
Duan, J.: An efficient algorithm for the multivariable Adomian polynomials. Appl. Math. Comput. 217(6), 2456–2467 (2010)
Rach, R.: A convenient computational form for the Adomian polynomials. J. Math. Anal. Appl. 102(2), 415–419 (1984)
Duan, J.: Convenient analytic recurrence algorithms for the Adomian polynomials. Appl. Math. Comput. 217(13), 6337–6348 (2011)
Wazwaz, A.M.: A reliable modification of Adomian decomposition method. Appl. Math. Comput. 102(1), 77–86 (1999)
Rach, R.C.: A new definition of the Adomian polynomials. Kybernetes 37(7), 910–955 (2008)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Singh, R., Wazwaz, AM. Numerical solutions of fourth-order Volterra integro-differential equations by the Green’s function and decomposition method. Math Sci 10, 159–166 (2016). https://doi.org/10.1007/s40096-016-0190-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40096-016-0190-0
Keywords
- Integro-differential equations
- Boundary value problems
- Adomian decomposition method
- Green’s function
- Approximations