
Abstract
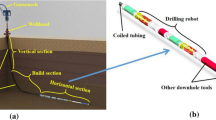
A new type of drilling robot driven by drilling fluid is proposed, whose traction force is provided by differential pressure inside and outside of the drilling robot. The fluid mechanical model of differential pressure is established based on the principle of pressure drop. The equations for calculating the traction force of the robot in no-load condition and load condition are derived respectively. The dynamic model of drilling robot is established and the calculation method of key parameters such as weight on bit (WOB) and rate of penetration (ROP) in the dynamic model is derived. The influence of flow rate of drilling fluid on ROP/velocity and traction force of the drilling robot is analyzed. Among them, with the increasing of flow rate, the ROP/velocity and the traction force of drilling robot increases in a nearly linear trend. In the no-load condition (traction process), the drilling robot will be in acceleration until the telescopic cylinder stops pumping drilling fluid. In the load condition (drilling process), the drilling robot will reach a balance with the mechanical drilling rate within 0.1s. The proposed drilling robot can provide the possibility for the downhole operations in horizontal well with long displacement or in the condition of large traction force request. What’s more, this paper will provide a theoretical guidance for the control of ROP and WOB in the drilling process, and promote the application of drilling robots.
Similar content being viewed by others

References
Hallundbæk, J.: Well tractors for highly deviated and horizontal wells. In: Europec 1994 of the SPE European Petroleum Conference Held in London (1994)
Searight, T.L.: Wireline tractor production logging experience in Australian horizontal wells. In: 1996 SPE Asia Pacific Oil and Gas Conference and Exhibition (1998)
Bybee, K.: New downhole tool extends coiled-tubing reach. New J. Pet. Technol. 52(6), 32–34 (2000)
Hallundbaek, J.; Ostvang, K.; Haukvik, J.; Skeie, T.; Heijer, A.D.: Wireline well tractor: case histories. In: Offshore Technology Conference (1997)
Hallundbæk, J.: Radial piston motor or pump. US5391059, 21 Feb 1995
Denney, D.: Wireline-tractor production logging in horizontal wells. J. Pet. Technol. 51(3), 80–81 (1999)
Local, E.: Wireline tractor production logging experience in Australian horizontal wells. In: SPE Asia Pacific Oil and Gas Conference and Exhibition (1998)
Logging while Tractoring GE Oil & Gas[EB/OL]. https://www.geoilandgas.com/oilfield/wireline-technology/logging-while-tractoring. Accessed 6 June 2018
Stuart-Bruges, W.P.; Searight, T.L.; Harris, N.G.: Centralizer for wireline tools. US:US7090007, 15 Aug 2006
Lam, F.S.; Joseph, P.C.; Brian, S.: Wireline tractor technology supports fast tracking new well design. In: ADC/SPE Asia Pacific Drilling Technology Conference and Exhibition (2008)
Schwanitz, B.: Isolation valve contingencies using wireline stroker and tractor technologies. In: 2009 SPE Annual Technical Conference and Exhibition (2009)
Giem, G.; Sheiretov, T.; Couble, Y.: Wireline tractor for through-tubing intervention in wells with barefoot openhole completions. In: SPE/CoTA Coiled Tubing Well Intevention Conference Exhibtion (2018)
Fouche, P.-A.; Vander Poorten, R.: Wireline tractor advanced restriction navigation. In: SPE/CoTA Coiled Tubing Well Intevention Conference Exhibtion (2018)
Doering, F.W.; Dupree, W.D.: Chain drive system. US:7222682, 29 May 2007
Ueland, G.; Mellemstrand, J.: Device for a pulling tool for use in pipes and boreholes for the production of oil and gas. US:US7363989, 29 April 2008
Hallundbæk, J.: Downhole driving unit having a hydraulic motor in a wheel. US:US9435167, 6 Sept 2016
Ludwig, W.N.: Well tractor. US:14/406889, 14 June 2012
Li, Y.; Liu, Q.; Chen, Y.; Ren, T.: Design and analysis of an active helical drive downhole tractor. Chin. J. Mech. Eng. 30(2), 428–437 (2017)
Guerrero, J.C.; Doering, F.W.; Roy, C.J.: Open hole tractor with tracks. US:7156192, 2 Jan 2007
Norman, B.M.; Ronald, E.B.; Rudolph, E.E.: Puller-thruster downhole tool. US:US6003606, 21 Nov 1999
Jeff, F.; John, W.; Christian, B.M.; Bob, D.; Bob, G.; Chuck, W.; Den Heijer, A.: Tractor-conveyed sensors and chemical packer are utilized to remediate an extended-reach horizontal uncemented slotted liner completion in a siliceous shale reservoir. In: SPE International Thermal Operations and Heavy Oil Symposium and Western Regional Meeting (2004)
Alden, M.; Arif, F.; Billingham, M.: Advancing downhole conveyance. Oilfield Rev. 16(3), 30–43 (2004)
Fang, D.; Shang, J.; Luo, Z.; Wu, G.; Liu, Y.: Mechanical design of downhole tractor based on two-way self-locking mechanism. Mater. Sci. Eng. 324, 1–5 (2018)
Qiao, J.; Shang, J.; Chen, X.; Luo, Z.; Zhang, X.: Unilateral self-locking mechanism for inchworm in-pipe robot. J. Cent. South Univ. 17(5), 1043–1048 (2010)
Billingham, M.; El-Toukhy, M.A.; Hashem, K.M.; Hassaan, M.; Lorente, M.; Sheiretov, T.; Loth, M.: Conveyance—down and out in the oil field. Oilfield Rev. 23(2), 18–31 (2011)
Liu, Q.; Zheng, W.; Yang, Y.; Zhang, S.; Zhu, H.: Two-way locking mechanism design for telescopic downhole tractor. J. Southwest Pet. Univ. Sci. Ed. 40(1), 1–10 (2018)
Liu, Q.; Zhao, J.; Zhu, H.; Zheng, W.; Yang, Y.: A novel double bevel support structure for downhole robot. Arab. J. Sci. Eng. 1(2191–4281), 1–11 (2018)
Ma, D.; Li, G.; Huang, Z.; Niu, J.; Hou, C.; Liu, M.; Li, J.: A model of calculating the circulation pressure loss in coiled tubing ultra-short radius radial drilling. Pet. Explor. Dev. 39(4), 494–499 (2012)
Chen, X.; Qin, C.: The development and application of indented long stroke hydraulic thruster. China Pet. Mach. 43(6), 20–23 (2015)
Xu, B.: Research on Output Performance Analysis and Application of Positive Displacement Motor (PDM). Southwest Petroleum University, Chengdu (2007)
Samuel, G.R.; Miska, S.: Optimization of drilling parameters with the performance of multilobe positive displacement motor (PDM). In: IADC/SPE Asia Pacific Drilling Technology (1998)
Maldla, E.E.; Ohara, S.: Field verification of drilling models and computerized selection of drill bit, WOB, and drillstring rotation. SPE Drill. Eng. 6(3), 189–195 (1989)
Peterson, J.L.: Diamond drilling model verified in field and laboratory tests. J. Pet. Technol. 28(2), 213–222 (1976)
Motahhari, H.R.; Hareland, G.; Nygaard, R.; Bond, B.: Method of optimizing motor and bit performance for maximum ROP. J. Can. Pet. Technol. 48(6), 44–49 (2009)
Zhu, H.; Liu, Q.; Wang, T.: Reducing the bottom-hole differential pressure by vortex and hydraulic jet methods. J. Vibroeng. 15(5), 2224–2249 (2014)
Eren, T.; Kok, M.V.: A new drilling performance benchmarking: ROP indexing methodology. J. Pet. Sci. Eng. 163, 387–398 (2018)
Acknowledgements
This work is supported by the Science and Technology Project of Sichuan Province (Nos. 2013GZ0150, 2014GZ0121, 2015SZ0010) and the Science and Technology Project of Nanchong City (No. NC17SY4019). This work is also supported by Research Project of Key Laboratory of Fluid and Power Machinery (Xihua University).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liu, Q., Zhao, J., Zhu, H. et al. Mechanical Model of Drilling Robot Driven by the Differential Pressure of Drilling Fluid. Arab J Sci Eng 44, 1447–1458 (2019). https://doi.org/10.1007/s13369-018-3578-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-018-3578-3