
Abstract
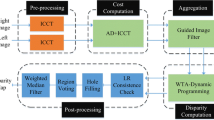
By establishing slanted surfaces, PatchMatch stereo (PMS) algorithm can achieve impressive disparity details and high sub-pixel precision. However, it is too unwieldy for practical calculations in handling images with high resolution. In this paper, we improved the PMS algorithm to efficiently handle the high-resolution images. Firstly, four-mode census transform, which can improve matching accuracy and solve the problem of the center pixel distortion effectively, is applied to measure the dissimilarity between pixels, instead of the absolute differences of the gray-value and the gray-value gradient. Utilizing this transform can halve the time of dissimilarity measurement compared to that of PMS. Then, the proposed algorithm adopt the integer disparity plane approximation strategy during the PatchMatch inference procedure. This strategy is applied in the random initialization step, the computation of the matching cost and the process of searching and renewing the minimum matching cost. Finally, the outlier pixels are refined with the post-process steps. Experimental results show that the proposed algorithm is more efficient than the PMS algorithm and generates comparable disparity maps in handling the high-resolution images.
Graphical Abstract








Similar content being viewed by others


References
Yang, Y., Hu, X., Wu, N., Wang, P., Xu, D., & Rong, S. (2017). A depth map generation algorithm based on saliency detection for 2d to 3d conversion. 3D Research, 8(3), 29.
Zhang, K., Lu, J., & Lafruit, G. (2009). Cross-based local stereo matching using orthogonal integral images. IEEE Transactions on Circuits and Systems for Video Technology, 19(7), 1073–1079.
Zhan, Y., Gu, Y., Huang, K., Zhang, C., & Hu, K. (2016). Accurate image-guided stereo matching with efficient matching cost and disparity refinement. IEEE Transactions on Circuits and Systems for Video Technology, 26(9), 1632–1645.
Geng, Y. (2016). Local stereo matching based on information entropy of image. 3D Research, 7(3), 27.
Zabih, R., & Woodfill, J. (1994). Non-parametric local transforms for computing visual correspondence. In Computer vision—ECCV’94.
Hirschmuller, H. (2007). Stereo processing by semiglobal matching and mutual information. IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2), 328–341.
Heo, Y. S. (2016). Two-step mutual information-based stereo matching. Electronics Letters, 52(14), 1225–1227.
Sarkar, I., & Bansal, M. (2007). A wavelet-based multiresolution approach to solve the stereo correspondence problem using mutual information. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 37(4), 1009–1014.
Hamzah, R. A., Ibrahim, H., & Hassan, A. H. A. (2016). Stereo matching algorithm based on per pixel difference adjustment, iterative guided filter and graph segmentation. Journal of Visual Communication and Image Representation, 42, 145–160.
Yoon, K. J., & Kweon, I. S. (2006). Adaptive support-weight approach for correspondence search. IEEE Transactions on Pattern Analysis and Machine Intelligence, 28(4), 650–656.
Hosni, A., Rhemann, C., Bleyer, M., Rother, C., & Gelautz, M. (2011). Fast cost-volume filtering for visual correspondence and beyond. In IEEE conference on computer vision and pattern recognition (Vol. 35, pp. 3017–3024). IEEE Computer Society.
Kolmogorov, V., & Zabih, R. (2001). Computing visual correspondence with occlusions using graph cuts. Ithaca: Cornell University.
Lei, C., Selzer, J., & Yang, Y. H. (2006). Region-tree based stereo using dynamic programming optimization. In IEEE computer society conference on computer vision and pattern recognition (Vol. 2, pp. 2378–2385). IEEE Computer Society.
Sun, J., Li, Y., Kang, S. B., & Shum, H. Y. (2005). Symmetric stereo matching for occlusion handling. In IEEE computer society conference on computer vision and pattern recognition (Vol. 2, pp. 399–406). IEEE Computer Society.
Sun, J., Zheng, N. N., & Shum, H. Y. (2003). Stereo matching using belief propagation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(7), 787–800.
Žbontar, J., & Lecun, Y. (2015). Computing the stereo matching cost with a convolutional neural network. In Computer vision and pattern recognition (pp. 1592–1599). IEEE.
Luo, W., Schwing, A. G., & Urtasun, R. (2016). Efficient deep learning for stereo matching. In Computer vision and pattern recognition (pp. 5695–5703). IEEE.
Kendall, A., Martirosyan, H., Dasgupta, S., Henry, P., Kennedy, R., & Bachrach, A., et al. (2017). End-to-end learning of geometry and context for deep stereo regression. In International conference on computer vision (pp. 66–75). IEEE.
Shaked, A., & Wolf, L. (2016). Improved stereo matching with constant highway networks and reflective confidence learning. In Computer vision and pattern recognition (pp. 6901–6910). IEEE.
Liang, Z., Liu, H., Qiao, L., Feng, Y., & Chen, W. (2017). Improving stereo matching by incorporating geometry prior into convnet. Electronics Letters, 53(17), 1194–1196.
Li, L., Yu, X., Zhang, S., Zhao, X., & Zhang, L. (2017). 3D cost aggregation with multiple minimum spanning trees for stereo matching. Applied Optics, 56(12), 3411–3420.
Puglia, L., Vigliar, M., & Raiconi, G. (2017). Real-time low-power FPGA architecture for stereo vision. IEEE Transactions on Circuits and Systems II: Express Briefs, 64, 1307–1311.
Pérez-Patricio, M., Aguilar-González, A., Arias-Estrada, M., Hernandez-de Leon, H. R., Camas-Anzueto, J. L., & de Jesús Osuna-Coutiño, J. A. (2016). An FPGA stereo matching unit based on fuzzy logic. Microprocessors and Microsystems, 42, 87–99.
Aguilar-González, A., & Arias-Estrada, M. (2016). An FPGA stereo matching processor based on the sum of hamming distances. In International symposium on applied reconfigurable computing (pp. 66–77). Cham: Springer.
Zha, D., Jin, X., & Xiang, T. (2016). A real-time global stereo-matching on FPGA. Microprocessors and Microsystems, 47, 419–428.
Bleyer, M., Rhemann, C., & Rother, C. (2011). PatchMatch stereo–stereo matching with slanted support windows. In British machine vision conference (Vol. 554, pp. 14.1–14.11).
Chang, T. A., Lu, X., & Yang, J. F. (2017). Robust stereo matching with trinary cross color census and triple image-based refinements. EURASIP Journal on Advances in Signal Processing, 2017(1), 27.
Men, Y., Zhang, G., Men, C., & Li, X. (2015). A stereo matching algorithm based on four-moded census and relative confidence plane fitting. Chinese Journal of Electronics, 24(4), 807–812.
Geiger, A., Roser, M., & Urtasun, R. (2010). Efficient large-scale stereo matching. In Asian conference on computer vision (Vol. 6492, pp. 25–38). Springer.
Jellal, R. A., Lange, M., Wassermann, B., Schilling, A., & Zell, A. (2017). LS-ELAS: Line segment based efficient large scale stereo matching. In IEEE international conference on robotics and automation (pp. 146–152). IEEE.
Funding
Funding was provided by National Natural Science Foundation of China (Grant Nos. 61401137, 61404043), Key Science and Technology Project of Anhui Province (Grant No. 16030901007).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Yang, Y., Xu, D., Rong, S. et al. An Efficient Stereo Matching Algorithm Based on Four-Moded Census Transform for High-Resolution Images. 3D Res 9, 33 (2018). https://doi.org/10.1007/s13319-018-0185-8
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13319-018-0185-8