
Abstract
We consider population games in which payoff depends upon the aggregate strategy level and which admit a potential function. Examples of such aggregative potential games include the tragedy of the commons and the Cournot competition model. These games are technically simple as they can be analyzed using a one-dimensional variant of the potential function. We use such games to model the presence of externalities, both positive and negative. We characterize Nash equilibria in such games as socially inefficient. Evolutionary dynamics in such games converge to socially inefficient Nash equilibria.
Similar content being viewed by others


Notes
See Sandholm [15] for a review of such results.
The assumptions that m and n are positive integers ensure that the dimension \(mn+1\) in \(\mathbf {R}^{mn+1}_+\) makes sense.
Note that we define the cost function with respect to the domain [0, m] and not the finite set \(S_n\). This is primarily because when we define the quasi-potential function in Sect. 4, we need the continuous version of the cost function.
See Sandholm [14] for an alternative definition of potential games. Definition 3.1 extends the domain of F from X to \(\mathbf {R}^{mn+1}_+\) in order to ensure that partial derivatives of the type \(\frac{\partial f}{\partial x_i}\) does exist. The alternative way is to confine oneself to X and define a potential game using affine calculus, as in Sandholm [14].
The converse is not true. It is possible for Nash equilibria to be local minimizers of the potential function. For example, completely mixed equilibria of pure coordination games minimize the corresponding potential function.
Also note that in defining g, we use the fact that c has domain [0, m]. See also footnote 4.
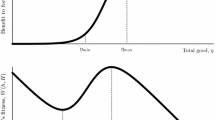
As an example of a game with multiple equilibria, consider a tragedy of the commons model with production function \(\pi (z)=5\sqrt{z}\), strategy set \(S_n=\{0,1,2,3,4,5\}\) and linear cost function \(c(i)=3i\). The average product, and so the aggregate benefit function, is \(AP(z)=\frac{5}{\sqrt{z}}\). Hence, the resulting quasi-potential function is \(g(\alpha )=\int _0^{\alpha }AP(z)dz-c(\alpha )=10\sqrt{\alpha }-3\alpha \). This function is maximized at \(\alpha ^{*}=\frac{25}{9}\). The linearity of the cost function implies that if \(a(x)=\alpha \), then \(f(x)=g(\alpha )\). Hence, the potential function f is maximized at any state \(x^{*}\) such that \(a(x^{*})=\alpha ^{*}=\frac{25}{9}\). The set of such states is convex which, by Proposition 4.3, coincides with the set of Nash equilibria.
The large population model of Cournot competition is, therefore, actually a model of perfect competition. Formally, this follows from the fact that each producer has zero weight in the whole population. See also the related discussion in the Introduction and comparison with results in Vega-Redondo [19] and Alós-Ferrer and Ania [2].
For example, \(\beta (z)=\frac{3}{2}\sqrt{z}\) and \(c(\alpha )=\alpha ^{\frac{3}{2}}\). In that case, \(g(\alpha )=0\) for all \(\alpha \), and there is no unique maximizer.
The converse of Proposition 4.4(1) does not hold if \(S_n\) is not sufficiently dense. For example, consider F with \(S_n=\{0,1\}\), \(\beta (\alpha )=\frac{1}{2}(1+\alpha )\) and \(c(i)=i^2\). Then, \(e_0\) is a Nash equilibrium as \(F_0(e_0)=0>F_1(e_0)=-\frac{1}{2}\).
We refer the reader to Sect. 6 for a more detailed discussion on how evolutionary dynamics behave in potential games.
Monomorphic states that minimize the potential function in Proposition 4.4 need not be Nash equilibria. For example, consider the aggregative potential game F with \(\beta (\alpha )=(\alpha +1)^{0.5}\), \(c(\alpha )=\alpha ^2\) and \(S_n=\{0,0.25.0.5,0.75,1\}\). The resulting potential function is globally minimized at the state \(e_0\), which corresponds to \(\alpha =0\) that minimizes the quasi-potential function. But, \(e_0\) is not a Nash equilibrium of F as \(F_{0.5}(e_0)=0.25>F_0(e_0)=0\).
Indeed, the similarity of the proof of this part of the proposition and the if part of Proposition 4.3 leads to a more general conclusion. If the cost function is linear and g has an interior maximizer or minimizer, say \(\alpha \), then there exists a convex set of Nash equilibria of F, with each such equilibrium having aggregate strategy level \(\alpha \). This is irrespective of the shape of \(\beta \).
Proposition 4.5 considers the case where a strictly convex g has minimizer \(\hat{\alpha }\in (0,m)\). If g is strictly convex with minimizer 0, then that case is covered by Proposition 4.4. If g is strictly convex with minimizer m, then a variant of Proposition 4.4 holds. In that case, \(e_0\) is a Nash equilibrium but \(e_m\) is not necessarily so. For example, if \(\beta (\alpha )=1+\sqrt{\alpha }\), \(c(\alpha )=2\alpha \) and \(m<1\), then the minimizer of g is m. In that case, \(F_m(e_m)=m(1+\sqrt{m})-2m<0=F_0(e_m)\).
We note, however, that \(x^{**}\) here is efficient only in the restricted sense of maximizing the aggregate profit of the population of producers, i.e., maximizing producer surplus. If, however, we also consider consumers as active agents, then the Nash equilibrium, which is the maximizer of the potential function (8), is indeed efficient in the wider sense of maximizing the sum producer and consumer surplus. Under a perfectly discriminating monopolist, the Nash equilibrium aggregate quantity level would have maximized producer surplus. But that requires that the monopolist obtains a different price for every unit of output sold, i.e., price p(i) for the ith unit of output. In the competitive scenario that we have modeled, that is not possible as producers get the same price p(a(x)) from every unit of output.
An example of such a game is the Cournot competition model with constant elasticity of demand function \(p(\alpha )=\alpha ^{-\frac{1}{\varepsilon }}\), \(\varepsilon >1\), and zero marginal cost. I thank one of the anonymous referees for suggesting this example.
For \(\beta \) to be increasing, \(r>0\) which means \(\beta (0)=0\). Hence, \(F_i(e_0)=-c\), for all \(i\in S_n\).
Positive homogeneity of \(\hat{F}\) means \(\hat{F}_i(tx)=t^k\hat{F}_i(x)\), \(k>-1\). The term positive homogeneity arises from the fact that if a potential game is homogeneous of degree \(k>-1\), then its potential function is homogeneous of degree \(l>0\). See Section 3.1.6, Sandholm [15] for details.
See, for example, Lahkar and Sandholm [9] for a more detailed exposition of behavioral rules, also called revision protocols, and the resulting evolutionary dynamics.
To obtain a congestion game of the type considered in Sandholm [12] with two parallel links from \(F_{iK}\), take \(b_K(i)=0\) and \(S_n=\{1\}\).
To see the existence of such \(\tilde{x}\), note that \(\{0,m\}\subseteq S_n\), for all n. Take the support of \(\tilde{x}\) to be \(\{0,m\}\) and let \(\tilde{x}=\{1-\frac{\tilde{\alpha }}{m},0,\ldots ,0,\frac{\tilde{\alpha }}{m}\}\). Then, \(a(\tilde{x})=\tilde{\alpha }\).
References
Acemoglu D, Jensen M (2013) Aggregate comparative statics. Games Econ Behav 81:27–49
Alós-Ferrer C, Ania A (2005) The evolutionary stability of perfectly competitive behavior. Econ Theory 26:497–516
Bergin J, Bernhardt D (2004) Comparative learning dynamics. Int Econ Rev 2:431–465
Corchón L (1994) Comparative statics for aggregative games the strong concavity case. Math Soc Sci 23:151–165
Dindoš M, Mezzetti C (2006) Better-reply dynamics and global convergence to Nash equilibria in aggregative games. Games Econ Behav 54:261–292
Fudenberg D, Levine D (1998) Theory of learning in games. MIT Press, Cambridge
Hofbauer J (2000) From Nash and Brown to Maynard Smith: equilibria, dynamics, and ESS. Selection 1:81–88
Kukushkin N (2004) Best response dynamics in finite games with additive aggregation. Games Econ Behav 48:94110
Lahkar R, Sandholm W (2008) The projection dynamic and the geometry of population games. Games Econ Behav 64:565–590
Monderer D, Shapley L (1996) Potential games. Games Econ Behav 14:124–143
Ostrom E (1990) Governing the commons: the evolution of institutions for collective action. Cambridge University Press, Cambridge
Sandholm W (2001) Potential games with continuous player sets. J Econ Theory 97:81–108
Sandholm W (2002) Evolutionary implementation and congestion pricing. Rev Econ Stud 69:667–689
Sandholm W (2009) Large population potential games. J Econ Theory 144:1710–1725
Sandholm W (2010) Population games and evolutionary dynamics. MIT Press, Cambridge
Schaffer M (1988) Evolutionarily stable strategies for a finite population and a variable contest size. J Theor Biol 132:469–478
Smith M (1984) The stability of a dynamic model of traffic assignment. Transp Sci 18:245–252
Taylor P, Jonker L (1978) Evolutionarily stable strategies and game dynamics. Math Biosci 40:145–156
Vega-Redondo F (1997) The evolution of Walrasian behavior. Econometrica 65:375–384
Author information
Authors and Affiliations
Corresponding author
Additional information
I thank an anonymous associate editor and two anonymous referees for various comments and suggestions. Any remaining error or omission is my responsibility.
Appendix
Appendix
1.1 Proofs of Section 4
Proof of Lemma 4.1
From (4), we have
Since a typical strategy in \(S_n\) is \(i=\frac{k}{n}\) for some \(k\in \{0,1,2,\ldots ,mn\}\), the Hessian matrix of f is
If \(\beta ^{\prime }(a(x))<0\), this is a negative semidefinite matrix. Therefore, f is concave. To check that f is not strictly concave, take \(x,y\in X,x\ne y\), such that \(a(x)=a(y)\). In that case, \(f(\lambda x+(1-\lambda )y)=\lambda f(x)+(1-\lambda )f(y)\), for all \(\lambda \in [0,1]\).
For the properties of g, note that \(g^{\prime }(\alpha )=\beta (\alpha )-c^{\prime }(\alpha )\) and \(g^{\prime \prime }(\alpha )=\beta ^{\prime }(\alpha ) -c^{\prime \prime }(\alpha )\). Since \(\beta \) is strictly decreasing and c is convex, \(g^{\prime \prime }(\alpha )<0\). Concavity and the existence of a unique maximizer follows. \(\square \)
Proof of Proposition 4.2
Let f be the potential function of F. Since f is concave, all local maximizers of f are global maximizers. Therefore, it is sufficient to consider only global maximizers of f to identify Nash equilibria.
-
1.
Let \(\alpha ^{*}\in S_n\). Due to the concavity of f (by Lemma 4.1), it is sufficient to show that \(e_{\alpha ^{*}}\) is the unique global maximizer of f. Consider \(x\ne e_{\alpha ^{*}}\) such that \(a(x)=\alpha \). Then,
$$\begin{aligned} f(e_{\alpha ^{*}})=g(\alpha ^{*})\ge g(\alpha )>f(x), \end{aligned}$$where the equality in the weak inequality holds only if x is polymorphic such that \(a(x)=\alpha ^{*}\), and the strict inequality holds due to the strict convexity of c. Therefore, for all \(x\ne e_{\alpha ^{*}}\), \(f(e_{\alpha ^{*}})>f(x)\).
-
2.
To simplify notation, denote \(i=\frac{\lfloor n\alpha ^{*}\rfloor }{n}\) and \(j=\frac{\lceil n\alpha ^{*}\rceil }{n}\). First, consider i. Since g is strictly concave and \(i<\alpha ^{*}\), it is clear that for all \(k<i\), \(g(k)<g(i)\). Suppose x is such that \(a(x)<i\). Then, as in part 1 of this proof, if x is monomorphic, \(f(e_i)>f(x)\). If x is polymorphic,
$$\begin{aligned} f(e_i)=g(i)\ge g(a(x))>f(x), \end{aligned}$$where the strict inequality follows from the strict convexity of c. Therefore, \(f(e_i)>f(x)\) for all x such that \(a(x)<i\). A similar argument implies that if \(a(x)>j\), then \(f(e_j)>f(x)\). This follows from the fact that for all \(k>j\), \(g(k)<g(j)\). Hence, if x is a global maximizer of f, it must be the case that \(a(x)\in [i,j]\).
Now consider x and \(x^{\prime }\) such that \(a(x)=a(x^{\prime })\in [i,j]\), x has support in \(\{i,j\}\) and there exists \(k\in S_n\setminus \{i,j\}\) in the support of \(x^{\prime }\). Then, the strict convexity of c implies \(\sum _l c(l)x_l<\sum _l c(l)x_l^{\prime }\). This then implies that \(f(x)>f(x^{\prime })\). We, therefore, conclude that if x is a global maximizer of f, and, hence, a Nash equilibrium of F, then its support must be limited to \(\{i,j\}\).
To show uniqueness, suppose both \(e_i\) and \(e_j\) are Nash equilibria. If \(e_i\) is a Nash equilibrium, then \(F_i(e_i)\ge F_j(e_i)\) or \(i\beta (i)-c(i)\ge j\beta (i)-c(j)\), which implies
Similarly, if \(e_j\) is a Nash equilibrium, \(F_j(e_j)\ge F_i(e_j)\) or \(j\beta (j)-c(j)\ge i\beta (j)-c(i)\) which implies
From (12) and (13), we get \(\beta (j)\ge \beta (i)\) which contradicts the assumption that \(\beta \) is strictly decreasing. Hence, both \(e_i\) and \(e_j\) cannot be Nash equilibria.
Now consider equilibrium \(x^{*}\) which has both strategies i and j as support. Clearly, there can be only one such Nash equilibrium. Note that \(i<a(x^{*})<j\) and it is possible that \(a(x^{*})\ne \alpha ^{*}\). In such an equilibrium, \(F_i(x^{*})=F_j(x^{*})\) or \(i\beta (a(x^{*}))-c(i)= j\beta (a(x^{*}))-c(j)\) which implies
Suppose both \(e_i\) and \(x^{*}\) are Nash equilibria. Then, from (12) and (14), we obtain \(\beta (a(x^{*}))\ge \beta (i)\) which contradicts the assumption that \(\beta \) is strictly decreasing. Suppose both \(e_j\) and \(x^{*}\) are Nash equilibria. Then, from (13) and (14), we obtain \(\beta (j)\ge \beta (a(x^{*}))\) which leads to the same contradiction.
Hence, there exists a unique Nash equilibrium which is either \(e_{\frac{\lfloor n\alpha ^{*}\rfloor }{n}}\), \(e_{\frac{\lceil n\alpha ^{*}\rceil }{n}}\) or a polymorphic state \(x^{*}\) having \(\left\{ \frac{\lfloor n\alpha ^{*}\rfloor }{n},\frac{\lceil n\alpha ^{*}\rceil }{n}\right\} \) as support.
Proof of Proposition 4.3
For the only if part, let \(x^{*}\) be a Nash equilibrium of F. Therefore, by concavity of f, it is a global maximizer of f. Hence, \(f(x^{*})\ge f(x)\), \(\forall x\in X\). Take \(\tilde{\alpha }\in [0,m]\). For any such \(\tilde{\alpha }\), there exists \(\tilde{x}\in X\) such that \(a(\tilde{x})=\tilde{\alpha }\).Footnote 23 Due to the linearity of c, \(f(x)=g(\alpha )\) if \(a(x)=\alpha \). Therefore, \(f(x^{*})\ge f(\tilde{x})\) implies \(g(a(x^{*}))\ge g(a(\tilde{x}))=g(\tilde{\alpha })\). Since this holds for all \(\tilde{\alpha }\in [0,m]\), \(a(x^{*})\) is the global maximizer of g, or \(a(x^{*})=\alpha ^{*}\).
For the if part, we need to consider three cases.
-
1.
Let \(\alpha ^{*}=0\). In that case, the unique \(x^{*}\) such that \(a(x^{*})=\alpha ^{*}\) is \(e_0\). We show that this is the unique Nash equilibrium. Note that \(\alpha ^{*}=0\) implies \(g^{\prime }(\alpha ^{*})=\beta (0)-k\le 0\), which implies \(\beta (\alpha )-k<0\), for all \(\alpha >0\), due to the fact that \(\beta \) is strictly decreasing. Let \(x\ne e_0\), \(a(x)=\alpha >0\), be a Nash equilibrium of F, with strategy \(j\ne 0\) in its support. If \(x\ne e_0\), there must be at least one such strategy in its support. Then, \(F_j(x)=j(\beta (\alpha )-k)<0=F_0(x)\), which is a contradiction. Thus, the only Nash equilibrium is \(x^{*}=e_0\).
-
2.
Let \(\alpha ^{*}=m\). In that case, the unique \(x^{*}\) such that \(a(x^{*})=\alpha ^{*}\) is \(e_m\). We show that this is the unique Nash equilibrium. Note that \(\alpha ^{*}=m\) implies \(g^{\prime }(\alpha ^{*})=\beta (m)-k\ge 0\), which implies \(\beta (\alpha )-k>0\), for all \(\alpha <m\), due to the fact that \(\beta \) is strictly decreasing. Let \(x\ne e_m\), \(a(x)=\alpha <m\), be a Nash equilibrium of F, with strategy \(j\ne m\) in its support. If \(x\ne e_m\), there must be at least one such strategy in its support. Then, \(F_j(x)=j(\beta (\alpha )-k)<m(\beta (\alpha )-k)=F_m(x)\), since \(\beta (\alpha )>k\) and \(m>j\). But this is a contradiction. Thus, the only Nash equilibrium is \(x^{*}=e_m\).
-
3.
Let \(\alpha ^{*}\in (0,m)\). In that case, the set \(\{x^{*}\in X:a(x^{*})=\alpha ^{*}\}\) is convex. For all such \(x^{*}\), \(g^{\prime }(\alpha ^{*})=0\Rightarrow \beta (\alpha ^{*}) -k=0\Rightarrow F_i(x^{*})=i(\beta (\alpha ^{*})-k)=0\), for all \(i\in S_n\). Hence, any such \(x^{*}\) is a Nash equilibrium.
Note that in each of three cases above, the set of Nash equilibria is convex. Hence, the second part of the proposition follows. \(\square \)
Proof of Proposition 4.4
Note that if \(\beta \) is strictly increasing, then the potential function f is convex. Hence, there may exist more than one local maximizer of f which implies that the set of Nash equilibria is not necessarily convex.
-
1.
Let \(\beta (0)=0\). Then, since \(c(0)=0\), \(F_0(e_0)=0\). Moreover, since \(c(i)>0\) for \(i>0\), \(F_i(e_0)<0\) for \(i>0\). Therefore, \(e_0\) is a Nash equilibrium of F.
-
2.
The fact that every local maximizer of f is a Nash equilibrium of F follows from results in Sandholm [12]. If \(\alpha \in S_n\), \(g(\alpha )=f(e_{\alpha })\). Therefore, if \(\alpha ^{*}\in S_n\), then \(f(e_i)<f(e_{\alpha ^{*}})\), for all \(i\in S_n\setminus \{\alpha ^{*}\}\). This, combined with the convexity of f, implies \(f(x)\le \Sigma _{i\in S_n}x_if(e_i)<f(e_{\alpha ^{*}})\), for all \(x\in X\setminus \{e_{\alpha ^{*}}\}\). Therefore, \(e_{\alpha ^{*}}\) is the global maximizer of f and, hence, is a Nash equilibrium of F.
-
3.
For linear c, let \(c(i)=ki\), for some \(k>0\). Then, \(g^{\prime }(\alpha )=\beta (\alpha )-k\). If g is strictly quasi-concave, then \(g^{\prime }(\alpha )>0\) in the immediate neighborhood of 0, which implies \(\beta (\alpha )>k\) in the neighborhood of 0. Increasing \(\beta (\alpha )\) then implies \(\beta (\alpha )>k\) for all \(\alpha \), which implies g is upward sloping for all \(\alpha >0\). Hence, \(\alpha ^{*}=m\). By part 2, therefore, \(e_m\) is the global maximizer of f which implies it is a Nash equilibrium of F.
For uniqueness of equilibrium, note that \(F_i(x)=i(\beta (a(x))-k)=i(\beta (\alpha )-k)\), where \(a(x)=\alpha \), which is increasing in i as \(\beta (\alpha )>k\), for all \(\alpha \in [0,m]\). Consider \(x\ne e_m\). Let \(a(x)=\alpha \) and let j be in the support of x. Hence, \(F_j(x)=j(\beta (\alpha )-k)>0\) (due to \(\beta (\alpha )>k\)). But then, \(F_m(x)>F_j(x)\), which means \(x\ne e_m\) cannot be a Nash equilibrium.
-
4.
If \(\alpha ^{*}\in S_n\), then the conclusion follows from part 2. If \(\alpha ^{*}\notin S_n\), \(\alpha ^{*}\in (0,m)\). The continuity of g then implies that on \(S_n\), g is maximized at either \(e_{\frac{\lfloor n\alpha ^{*}\rfloor }{n}}\) or \(e_{\frac{\lceil n\alpha ^{*}\rceil }{n}}\). Then, the same argument as in part 2 of this proof establishes this state as the global maximizer of f and, hence, as a Nash equilibrium of F. We note that as \(n\rightarrow \infty \), the aggregate strategy level at this equilibrium becomes arbitrarily close to \(\alpha ^{*}\).
To show that for large n, all monomorphic equilibria except \(e_0\) must have aggregate strategy level close to \(\alpha ^{*}\), fix \(i\in (0,m]\) and let \(S_n(i)\) denote the strategy set \(S_n\) containing i as a strategy. We show that if \(i\ne \alpha ^{*}\), then, for n large enough, \(e_i\) is not a Nash equilibrium in the game F with strategy set \(S_n(i)\). Combined with the previous paragraph of this proof, this suffices to establish the result.
For fixed \(i\in (0,m]\), define \(\phi _{i}:[0,m]\rightarrow \mathbf {R}\) as \(\phi _{i}(j)=j\beta (i)-c(j)\). Note that if \(i,j\in S_n\), then \(\phi _{i}(j)=F_j(e_i)\). The strict convexity of c and the fact that \(\beta (i)>0\) for \(i>0\) implies that \(\phi _{i}(j)\) is strictly concave with a unique maximizer, say \(j^{*}(i)\in (0,m]\), characterized by \(\beta (i)\ge c^{\prime }(j^{*}(i))\), with equality if \(j^{*}(i)<m\). Also, by assumption, \(\alpha ^{*}\in (0,m]\). If \(\alpha ^{*}\in (0,m)\), then \(\alpha ^{*}\) is the unique strictly positive solution to the equation \(\beta (\alpha )=c^{\prime }(\alpha )\). If \(\alpha ^{*}=m\), then \(\beta (\alpha )>c^{\prime }(\alpha ), \forall \alpha \in [0,m)\).
We now show that if \(i\ne \alpha ^{*}\), then \(j^{*}(i)\ne i\). First, suppose \(\alpha ^{*}=m\). Hence, \(i\ne \alpha ^{*}\) implies \(i<m\). Hence, \(j^{*}(i)= i\) implies \(\beta (i)=c^{\prime }(i)\) (from the condition \(\beta (i)= c^{\prime }(j^{*}(i))\) if \(j^{*}(i)=i<m\)). But if \(\alpha ^{*}=m\), \(\beta (i)>c^{\prime }(i), \forall i\in [0,m)\). This is a contradiction.
Second, suppose \(\alpha ^{*}\in (0,m)\) and \(i\ne \alpha ^{*}\). Then, for \(j^{*}(i)= i\), we require \(\beta (i)\ge c^{\prime }(i)\) (from the condition \(\beta (i)\ge c^{\prime }(j^{*}(i))\)), with equality if \(i<m\). But if this condition holds with equality, then \(i=\alpha ^{*}\) (since if \(\alpha ^{*}\in (0,m)\), it is the unique positive solution to the equation \(\beta (i)=c^{\prime }(i)\)). If this condition holds with strict inequality, then \(i=m\) and \(\beta (m)\ge c^{\prime }(m)\). But this is not possible if \(\alpha ^{*}\in (0,m)\).
Therefore, if \(i\ne \alpha ^{*}\), then \(j^{*}(i)\ne i\). Hence, for every \(i\in S_n\setminus \{0\},i\ne \alpha ^{*}\), there exists \(j\in [0,m]\), \(j\ne i\) such that \(\phi _i(j)>\phi _i(i)\). But if n is large enough, either \(j^{*}(i)\in S_n(i)\) or there exists \(j\in S_n(i)\) arbitrarily close to \(j^{*}(i)\). Then, either \(F_{j^{*}(i)}(e_i)>F_{i}(e_i)\), or by the continuity of the payoff functions, \(F_{j}(e_i)>F_{i}(e_i)\). Either way, \(e_i\) is not a Nash equilibrium if the strategy set is \(S_n(i)\), for n large. \(\square \)
Proof of Proposition 4.5
-
1.
The fact that every local maximizer of f is a Nash equilibrium follows from Sandholm [12]. For the remainder of this part of the proposition, note that both 0 and m are local maximizers of g. We need to show that \(e_0\) and \(e_m\) are local maximizers of f.
First, consider \(e_0\). Consider the strategy set \(S_n\) and denote \(S_n^{-}=\{i\in S_n: 0\le i\le \hat{\alpha }\}\). Since 0 is a local maximizer of g, \(f(e_0)=g(0)>g(i)=f(e_i), \forall i\in S_n^{-}\setminus \{0\}\). Let \(x\in X\) such that it has support only in \(S_n^{-}\). Thus, if \(j\notin S_n^{-}\), \(x_j=0\). The convexity of f implies \(f(x)\le f(e_0)\), with equality only if \(x=e_0\). Now consider \(x^{\prime }\in X\) such that \(x^{\prime }_j>0\) for at least some \(j\in S_n\setminus S_n^{-}\). By continuity of f, if \(x^{\prime }_j\) is small enough for all \(j\in S_n\setminus S_n^{-}\), then \(f(x)<f(e_0)\). Hence, \(e_0\) is a local maximizer of f and, therefore, a Nash equilibrium of F.
An analogous argument with the set \(S_n^{+}=\{i\in S_n: \hat{\alpha }\le i\le m\}\) establishes \(e_m\) as a Nash equilibrium of F.
-
2.
A linear c implies \(g(\alpha )=f(x)\) if \(a(x)=\alpha \). Now consider \(x^{\prime }\notin \{e_0,e_m\}\). Therefore, \(a(x^{\prime })=\alpha ^{\prime }\notin \{0,m\}\). Suppose \(\alpha ^{\prime }\in [\hat{\alpha },m)\). Then, there exists \(\alpha ^{\prime \prime }\in (\alpha ^{\prime },m)\) and arbitrarily close to \(\alpha ^{\prime }\) such that \(g(\alpha ^{\prime \prime })>g(\alpha ^{\prime })\). But this implies there exists \(x^{\prime \prime }\) arbitrarily close to \(x^{\prime }\) such that \(a(x^{\prime \prime })=\alpha ^{\prime \prime }\). In that case, \(f(x^{\prime \prime })>f(x^{\prime })\) and, therefore, \(x^{\prime }\) is not a local maximizer of f. A similar argument works if \(\alpha ^{\prime }\in (0,\hat{\alpha }]\).
Let \(c(i)=ki\), \(k>0\). At \(\hat{\alpha }\), \(g^{\prime }(\hat{\alpha })=\beta (\hat{\alpha }) -c^{\prime }(\hat{\alpha })=0\Rightarrow \beta (\hat{\alpha })=k\). Now, consider x such that \(a(x)=\hat{\alpha }\). At such x, for all \(i\in S_n\),
$$\begin{aligned} F_i(x)=i\beta (a(x))-c(i)=i\beta (\hat{\alpha })-ki=0. \end{aligned}$$Hence, x such that \(a(x)=\hat{\alpha }\) is a Nash equilibrium.
-
3.
Consider \(\phi _i(h)=h\beta (i)-c(h)\) as defined in the proof of part 4 of Proposition 4.4, and note that for \(h,i\in S_n\), \(\phi _i(h)=F_h(e_i)\). For fixed \(i>0\), the strict convexity of c and the fact that \(\beta (i)>0\) imply that \(\phi _i(h)\) is strictly concave with a unique maximizer, which we denote as \(h^{*}(i)\).
Now, let \(\hat{\alpha }\in S_n\) and note that \(h^{*}(\hat{\alpha })\) is characterized by \(\beta (\hat{\alpha })\ge c^{\prime }(h^{*}(\hat{\alpha }))\), with equality if \(h^{*}(\hat{\alpha })<m\). But from the fact that \(\hat{\alpha }\) is the unique minimizer of g and that \(\hat{\alpha }\in (0,m\)), we know that \(\beta (\hat{\alpha })=c^{\prime }(\hat{\alpha })\). Hence, \(h^{*}(\hat{\alpha })=\hat{\alpha }\). Therefore, \(\phi _{\hat{\alpha }}(\hat{\alpha })>\phi _{\hat{\alpha }}(j)\), for all \(j\ne \hat{\alpha }\), or \(F_{\hat{\alpha }}(e_{\hat{\alpha }})>F_j(e_{\hat{\alpha }})\), for all \(j\in S_n\setminus \hat{\alpha }\). Hence, \(e_{\hat{\alpha }}\) is a Nash equilibrium of F.
For \(\hat{\alpha }\notin S_n\), denote \(i=\frac{\lfloor n\hat{\alpha }\rfloor }{n}\) and \(j=\frac{\lceil n\hat{\alpha }\rceil }{n}\). Note that we only need to consider the case where \(i\ne 0\) and \(j\ne m\), as otherwise, by part 1 of the proposition, the statement is automatically satisfied.
First, we show that \(F_i(e_i)>F_j(e_i)\) and \(F_j(e_j)>F_i(e_j)\). For \(F_i(e_i)>F_j(e_i)\), note that \(\beta (\alpha )<c^{\prime }(\alpha )\), for \(\alpha <\hat{\alpha }\) (this is because g is declining at \(\alpha <\hat{\alpha }\)). From this, we can conclude that \(\phi _{\alpha }(h)\) is maximized at \(h^{*}(\alpha )<\alpha \) for \(\alpha \in (0,\hat{\alpha })\). To see this, note that \(\beta (\alpha )<c^{\prime }(\alpha )\) rules out \(h^{*}(\alpha )=m\) as that would mean \(\beta (\alpha )\ge c^{\prime }(m)>c^{\prime }(\alpha )\) (the first inequality holds if \(h^{*}(\alpha )=m\), the second follows from the strict convexity of c). Hence, \(h^{*}(\alpha )\in (0,m)\), and is, therefore, characterized by \(\beta (\alpha )=c^{\prime }(h^{*}(\alpha ))\). This must mean \(h^{*}(\alpha )\ne \alpha \) as otherwise \(\alpha =\hat{\alpha }\) (by the earlier paragraph). If \(h^{*}(\alpha )>\alpha \), then \(\beta (\alpha )<c^{\prime }(\alpha )<c^{\prime }(h^{*}(\alpha ))\), by the strict convexity of c. Therefore, \(\phi _{\alpha }(h)\) is maximized at \(h^{*}(\alpha )<\alpha \) for \(\alpha <\hat{\alpha }\). But \(i<\hat{\alpha }\) and, hence, \(h^{*}(i)<i\). Hence, \(\phi _i(h)\), which is a strictly concave function, starts declining at \(h^{*}(i)<i\). Therefore, since \(j>i\), \(\phi _i(i)>\phi _i(j)\), or \(F_i(e_i)>F_j(e_i)\). A similar argument, using the fact that g is increasing at \(\alpha >\hat{\alpha }\), establishes that \(\phi _{\alpha }(k)\) is increasing at j and, hence, that \(F_j(e_j)>F_i(e_j)\).
Therefore, there must exist some \(\tilde{\alpha }\in \left( i,j\right) \) such that \(F_i(\tilde{x})=F_j(\tilde{x})\), where \(\tilde{x}\) is the unique state having support in \(\{i,j\}\) such that \(a(\tilde{x})=\tilde{\alpha }\). We show that this \(\tilde{x}\) is a Nash equilibrium of F.
For this, note that \(F_i(\tilde{x})=F_j(\tilde{x})\) implies \(\phi _{\tilde{\alpha }}(i)=\phi _{\tilde{\alpha }}(j)\). Now, consider \(\phi _{\tilde{\alpha }}(h)\). The strict concavity of \(\phi _{\tilde{\alpha }}(h)\) implies that \(\phi _{\tilde{\alpha }}(h)>\phi _{\tilde{\alpha }}(i) =\phi _{\tilde{\alpha }}(j)\) if and only if \(h\in (i,j)\). But since \(\hat{\alpha }\notin S_n\), \(\{h\in S_n:i<h<j\}=\emptyset \). Hence, there exists no \(h\in S_n\) such that \(F_h(\tilde{x})>F_i(\tilde{x})=F_j(\tilde{x})\), where \(\tilde{x}\) is the unique state with support in \(\{i,j\}\) such that \(a(\tilde{x})=\tilde{\alpha }\). Therefore, this state is a Nash equilibrium of F.\(\square \)
1.2 Proofs of Section 5
Proof of Lemma 5.1
The Hessian matrix of \(\bar{F}\) is
The strict concavity of \(\alpha \beta (\alpha )\) on [0, m] implies that \(a(x)\beta ^{\prime \prime }(a(x))+2\beta ^{\prime }(a(x))<0\). Therefore, \(D^2\bar{F}(x)\) is a negative semidefinite matrix which implies \(\bar{F}\) is concave. To check that \(\bar{F}\) is not strictly concave, take \(x,y\in X,x\ne y\), such that \(a(x)=a(y)\). In that case, \(\bar{F}(\lambda x+(1-\lambda )y)=\lambda \bar{F}(x)+(1-\lambda )\bar{F}(y)\), for all \(\lambda \in [0,1]\).\(\square \)
Proof of Lemma 5.2
Note that \(\bar{g}^{\prime }(\alpha )=\alpha \beta ^{\prime } (\alpha )+\beta (\alpha )-c^{\prime }(\alpha )\) and \(\bar{g}^{\prime \prime }(\alpha )=\alpha \beta ^{\prime \prime } (\alpha )+2\beta ^{\prime }(\alpha )-c^{\prime \prime }(\alpha )\). Since \(\alpha \beta (\alpha )\) is strictly concave, \(\alpha \beta ^{\prime \prime }(\alpha )+2\beta ^{\prime }(\alpha )<0\). The convexity of c implies \(c^{\prime \prime }(\alpha )\le 0\). Hence, \(\bar{g}^{\prime \prime }(\alpha )<0\), i.e., \(\bar{g}\) is strictly concave with a unique maximizer which we denote \(\alpha ^{**}>0\).
On the other hand, \(g^{\prime }(\alpha )=\beta (\alpha )-c^{\prime }(\alpha )> \bar{g}^{\prime }(\alpha )\), since \(\beta ^{\prime }(\alpha )<0\). Therefore, if \(\alpha ^{**}\in (0,m)\), so that \(\bar{g}^{\prime }(\alpha ^{**})=0\), then \(g^{\prime }(\alpha ^{**})>0\). Hence, g is increasing at \(\alpha ^{**}\). Since g is concave (by Lemma 4.1) with a unique maximizer \(\alpha ^{*}\), this implies that \(\alpha ^{*}>\alpha ^{**}\). If \(\alpha ^{**}=m\), then, by the same argument, g is rising at m, the maximum possible value of \(\alpha ^{*}\). Therefore, \(\alpha ^{*}=m\).
Proof of Proposition 5.3
Since \(\bar{g}\) is strictly concave on [0, m] and \(\bar{F}\) is concave on X, the proofs of 1(a) and 1(b) follow from the arguments in the proofs of Propositions 4.2(1) and (2) respectively, with \(\bar{F}\) replacing f, \(\bar{g}\) replacing g and \(\alpha ^{**}\) replacing \(\alpha ^{*}\). This implies that for n sufficiently large, even if \(\alpha ^{**}\notin S_n\), \(a(x^{**})\) is arbitrarily close to \(\alpha ^{**}\). On the other hand, Proposition 4.2 implies that for n large, \(a(x^{*})\) is close to \(\alpha ^{*}\). But by Lemma 5.2, \(\alpha ^{**}\le \alpha ^{*}\), with equality only if \(\alpha ^{**}=m\). Hence, for n sufficiently large, \(a(x^{**})\le a(x^{*})\), with equality only if \(a(x^{**})=m\).
If c is linear, then \(\bar{F}(x)=a(x)\beta (a(x))-ca(x)\). Hence, if \(a(x)=\alpha \), \(\bar{F}(x)=\bar{g}(\alpha )\). The proof of part 2 then follows from the argument in the proof of Proposition 4.3 with, once again, \(\bar{F}\) replacing f, \(\bar{g}\) replacing g and \(\alpha ^{**}\) replacing \(\alpha ^{*}\). Therefore, at all n, every efficient state is characterized by \(a(x^{**})=\alpha ^{**}\). The relationship between \(a(x^{**})\) and \(a(x^{*})\) then follows from the relationship between \(\alpha ^{**}\) and \(\alpha ^{*}\) (Lemma 5.2) and the fact that at every Nash equilibrium \(x^{*}\), \(a(x^{*})=\alpha ^{*}\) (Proposition 4.3).
Proof of Proposition 5.4
The proof relies on the relationship between \(\alpha ^{**}\) and \(\alpha ^{*}\).
-
1.
Note that since \(\beta ^{\prime }(\alpha )>0\), \(\bar{g}^{\prime }(\alpha )>g^{\prime }(\alpha )\) for \(\alpha >0\). If g is as in Proposition 4.4, then g increases monotonically to \(\alpha ^{*}>0\). Therefore, on \((0,\alpha ^{*}]\), \(\bar{g}^{\prime }(\alpha )>g^{\prime }(\alpha )\ge 0\). Hence, \(\bar{g}\) is strictly increasing on \([0,\alpha ^{*}]\) which implies \(\alpha ^{**}\ge \alpha ^{*}\), with equality only if \(\alpha ^{*}=m\).
The characterization of \(x^{**}\) follows from the strict convexity of \(\bar{F}\) and the argument in the proof of Proposition 4.4 (2 and 4) with \(\bar{F}\) replacing f, and \(\bar{g}\) replacing g. Therefore, for n large, \(a(x^{**})\) is either equal to or very close to \(\alpha ^{**}\). On the other hand, if c is strictly convex, then by Proposition 4.4 (4), \(a(x^{*})\) is either 0, \(\alpha ^{*}\) or very close to \(\alpha ^{*}\) for all monomorphic Nash equilibria \(x^{*}\) of F, if n is large enough. The relationship between \(\alpha ^{*}\) and \(\alpha ^{**}\) then implies the stated relationship between \(a(x^{**})\) and \(a(x^{*})\). If c is linear, then the relationship follows from the fact that \(x^{*}=e_m\) is the unique Nash equilibrium [Proposition 4.4 (3)].
-
2.
We show that if g is as in Proposition 4.5, then \(\alpha ^{**}=m\). The minimizer of g, \(\hat{\alpha }\in (0,m)\), is characterized by \(\beta (\hat{\alpha })=c^{\prime }(\hat{\alpha })\). Denote as \(MC(\alpha )=c^{\prime }(\alpha )\), the marginal cost, and \(AC(\alpha )=\frac{c(\alpha )}{\alpha }\), the average cost. Note that \(g(0)=\bar{g}(0)=0\). At \(\hat{\alpha }\), \(\bar{g}(\hat{\alpha })=\hat{\alpha }\beta (\hat{\alpha }) -c(\hat{\alpha })=\hat{\alpha }(MC(\hat{\alpha })-AC(\hat{\alpha }))\ge 0\), since \(MC(\alpha )\) is greater than (equal to) \(AC(\alpha )\) when the cost function is strictly convex (linear). Moreover, \((MC(\alpha )-AC(\alpha ))\) is strictly increasing in \(\alpha \) (zero) if c is strictly convex (linear). Therefore, if \(\alpha \in (0,\hat{\alpha })\), so that g is strictly decreasing (which implies \(\beta (\alpha )<c^{\prime }(\alpha )\)), \(\bar{g}(\alpha )=\alpha \beta (\alpha )-c(\alpha )<\alpha c^{\prime }(\alpha )-c(\alpha )=\alpha (MC(\alpha )-AC(\alpha ))\le \hat{\alpha }(MC(\hat{\alpha })-AC(\hat{\alpha }))=\bar{g}(\hat{\alpha })\). Hence, \(\bar{g}(\hat{\alpha })\ge \bar{g}(\alpha )\), for all \(\alpha \in [0,\hat{\alpha })\), with equality only at \(\alpha =0\).
Furthermore, on \([\hat{\alpha },m]\) (where g is increasing so that \(\beta (\alpha )\ge c^{\prime }(\alpha )\)), \(\bar{g}^{\prime }(\alpha )=\beta (\alpha ) +\alpha \beta ^{\prime }(\alpha )-c^{\prime }(\alpha )>0\) (since \(\beta ^{\prime }>0\)). We, therefore, conclude that if \(\alpha \in [0,\hat{\alpha }]\), \(\bar{g}(\hat{\alpha })\ge g(\alpha )\), and on \((\hat{\alpha },m]\), \(\bar{g}\) is strictly increasing. Hence, \(\alpha ^{**}=m\). Note that \(\alpha ^{*}\) is either 0 or m. Hence, \(\alpha ^{**}\ge \alpha ^{*}\), with equality only if \(\alpha ^{*}=m\).
Since \(\alpha ^{**}\in S_n\), the argument in the proof of Proposition 4.4(2) implies that \(x^{**}=e_m\). Hence, \(a(x^{**})=m\). Since \(a(x^{*})\le m\) for all Nash equilibria \(x^{*}\), the relationship between \(a(x^{*})\) and \(a(x^{**})\) follows. \(\square \)
Rights and permissions
About this article

Cite this article
Lahkar, R. Large Population Aggregative Potential Games. Dyn Games Appl 7, 443–467 (2017). https://doi.org/10.1007/s13235-016-0190-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13235-016-0190-6