
Abstract
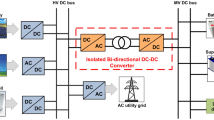
This paper proposes the design of a multivariable robust control strategy for a variable-speed WECS based on a SCIG. Optimal speed control of the SCIG is achieved by a conventional PI controller combined with a MPPT strategy. DTC-SVM technique based on a simple Clarke transformation is used to control the generator-side three-level converter in the variable speed WECS. The flow of real and reactive power between the inverter and the grid is controlled via the grid real and reactive currents and the DC link voltage using multivariable H\(_{\infty }\)control. The overall WECS and control scheme are developed in Matlab/Simulink and the performance of the proposed control strategy is evaluated via a set of simulation scenarios replicating various operating conditions of the WECS such as variable wind speed and asymmetric single grid faults. The power quality of the WECS system under H\(_{\infty }\)control control approach is assessed and the results show a significant improvement in the total harmonic distorsion as compared to that achieved with a classical PI control.






























Similar content being viewed by others

Abbreviations
- PI:
-
Proportional integral
- MPPT:
-
Maximum power point tracking
- LMI:
-
Linear matrix inequality
- AC:
-
Alternative current
- DC:
-
Direct current
- PMSG:
-
Permanent magnet synchronous generator
- SVM:
-
Space vector modulation
- SCIG:
-
Squirrel cage induction generator
- DFIG:
-
Doubly fed induction generator
- MI:
-
Modulation index
- WECS:
-
Wind energy conversion system
- DTC:
-
Direct torque control
- DTFC:
-
Direct torque and flux control
- PLL:
-
Phase locked loop
- PWM:
-
Pulse width modulation
- NPC:
-
Neutral point clamped
- DTC-SVPWM:
-
Direct torque control space vector pulse width modulation
References
Half-year Report, WWEA, The World Wind Energy Association, pp. 1–7 (2013)
Hyong, S.K., Dylan Dah-Chuan, L.: Wind energy conversion system from electrical perspective—a survey. Smart Grid Renew. Energy 1(3), 119–131 (2010)
Rechsteiner, R.: Wind power in context—a clean revolution in the energy sector. Energy Watch Group/Ludwig—Boelkow—Foundation, Decembre 2008. www.energywatchgroup.org (2008)
Haejoon, A., Heesang, K., Hongwoo, K., Hyungoo, K., Seokwoo, K., et al.: Modelling and voltage-control of variable-speed SCIG-based wind farm. Renew. Energy 42, 28–35 (2012)
Domínguez García, J.L., Gomis Bellmunt, O., Trilla-Romero, L., Junyent-Ferré, A.: Vector control of squirrel cage induction generator for wind power. In: IEEE XIX international conference on electrical machines ICEM’10, 6–8 Sept, Rome, pp. 1–6 (2010)
Haejoon, A., Heesang, K., Hongwoo, K., Seokwoo, K., Gilsoo, J., Byongjun, L.: Modeling and voltage-control of variable-speed SCAG-based wind farm. In: International symposium on low carbon and renewable energy technology ISLCT’10. Renewable Energy, vol. 42, pp. 28–35 (2012)
Kim, H.S., Lu, D.D.-C.: Wind energy conversion system from electrical perspective—a survey. Smart Grid Renew. Energy 1(3), 119–131 (2010)
Bhende, C.N., Mishra, S., Tanaka, S.G.M.: Permanent magnet synchronous generator-based standalone wind energy supply system. IEEE Trans. Sustain. Energy 2(4), 361–373 (2011)
Haque, M.E., Negnevitsky, M., Muttaqi, K.M.: A novel control strategy for a variable-speed wind turbine with a permanent-magnet synchronous generator. IEEE Trans. Ind. Appl. 46(1), 331–339 (2010)
Muhando, E.B., Senjyu, T., Uehara, A., Funabashi, T.: Gain-scheduled \(H_{\infty }\) control for WECS via LMI techniques and parametrically dependent feedback part II: controller design and implementation. IEEE Trans. Ind. Electron. 58(1), 57–65 (2011)
Mesemanolis, A., Mademlis, C., Kioskeridis, I.: Maximum electrical energy production of a variable speed wind energy conversion system. In: IEEE 21st international symposium on industrial electronics ISIE’12, Hangzhou, China 28–31, 1029–1034 (May 2012)
Xing-Jia, Y., Chang-Chun, G., Yan, L.: LPV H-infinity controller design for variable-pitch variable-speed wind turbine. In: IEEE 6th international conference on power electronics and motion control, IPEMC ’09, 17–20 May, Wuhan, China, pp. 2222–2227 (2009)
Ginter, V.J., Pieper, J.K.: Robust gain scheduled control of a hydrokinetic turbine part1: design. In: IEEE energy conference on electrical power EPEC’09, 22–23 Oct, Montreal, Canada, pp. 1–6 (2009)
Dengying, Z.: LVP H-infinity Controller Design for a Wind Power Generator. In: 2008 IEEE conference on robotics, automation and mechatronics, 21–24 September, Chengdu, China, pp. 873–878 (2008)
Lahmadi, K., Aboulem, S., Boumhidi, I.: LMI conditions to design a robust fuzzy controller for a wind generator. In: 5th IEEE international conference on systems and control, ICSC’16, Marrakesh, Morocco, 25–27 May, pp. 312–318 (2016)
Prakash Ray, K., Singh Vijay, P., Mohanty Soumya, R. et al.: Frequency control based on H\(_{\infty }\) controller for small hybrid power system. In: IEEE 5th international conference on power engineering and optimization PEOCO’11,-Selangor, Malaysia, 6–7 June 2011, pp. 227–232 (2011)
Moor, G.D., Beukes, H.J.: Maximum power point trackers for wind turbines. In: IEEE 35th annual conference on power electronics specialists, PESC’04, vol. 3, 20–25 June 2004, Aachen, Germany, pp. 2044–2049 (2004)
Merabet Boulouiha, H., Allali, A., Tahri, A., Draou, A., Denai, M.: A simple maximum power point tracking based control strategy applied to a variable speed squirrel cage induction generator. J. Renew. Sustain. Energy 4(5), 053124 (2012). doi:10.1063/1.4763562
Pardalos Panos, M., Steffen, R., Pereira Mario, V.F., Iliadis Niko, A., Vijay, P.: Handbook of Wind Power Systems, Book Series Energy Systems. Springer, Berlin (2013)
Merabet Boulouiha, H., Allali, A., Laouer, M., Tahri, A., Denai, M., Draou, A.: Direct torque control of multilevel SVPWM inverter in variable speed SCIG-based wind energy conversion system. Renew. Energy 80, 140–152 (2015)
D.W. Gu, I. Postlethwaite, M.C. Tsai: H\(_{\infty }\) Super Optimal Solutions. Advances in Control and Dynamic Systems, Vol. 51, Academic Press, San Diego, pp. 183–246 (1992)
Doyle, J.C., Glover, K., Khargnekar, P.K., Francis, B.A.: State-Space Solution to standard H\(_{2}\) and H\(_{\infty }\) control problem. IEEE Trans. Autom. Control 34, 831–846 (1989)
Apkarian, P., Biannic, J.M., Gahinet, P.: Self-scheduled H\(_{\infty }\) control of Missile via linear matrix inequalities. J. Guid. Control Dyn. 18(3), 532–538 (1995)
Gahinet, P., Apkarian, P.: A linear matrix inequality approach to H\(_{\infty }\) control. Int. J. Robust Nonlinear Control 4(4), 421–448 (1994)
Scherer, C.: The Riccati Inequality and State-Space H\(_{\infty }\) Optimal Control, Ph.D Thesis, University of Wurzburg, Germany (1990)
Scherer, C., Gahinet, P., Chilali, M.: Multi-objective output-feedback control via LMI optimization. IEEE Trans. Autom. Control 42(7), 896–911 (1997)
Sabatier, J., Lanusse, P., Melchior, P., Oustaloup, A.: Fractional Order, Differentiation and Robust Control Design CRONE, H-infinity and Motion Control’ Book Series in Intelligent Systems, Control and Automation: Science and Engineering. Springer, Berlin (2015)
Jahangir, H., Hemanshu Roy, P.: Robust Control for Grid Voltage Stability: High Penetration of Renewable Energy, Power System, pp 1–17. Springer, Berlin (2014)
Sun, Y., Mei, S., Gui, W.H.: One novel Variable-speed wind energy system based on PMSG and super sparse matrix converter. In: IEEE International conference on electrical machines and systems, ICEMS’08, 17–20 october 2008, Wuhan, China, pp. 2384–2389 (2008)
Nakamura, T., Morimoto,S., Sanada, M., Takeda, Y.: Optimum control of IPMSG for wind generation system. In: Conference on power conversion, PCC’02, Vol. 3, 2–5 April 2002, Osaka, pp. 1435–1440 (2002)
Abad, G., Lopez, J., Rodriguez, M.A., Marroyo, L., Iwanski, G.: Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation. Wiley, New Jersey (2011)
Heier, S.: Grid Integration of Wind Energy: Onshore and Offshore Conversion Systems, 3rd edn. Wiley, New Jersey (2014)
Van Dooren, P., Fridman, E., Shaked, U.: H\(_{\infty }\)Control of Linear State-Delay Descriptor Systems: an LMI Approach, Linear Algebra and its Applications, Vol. 351–352, 15 August 2002, Fourth Special Issue on Linear Systems and Control, pp 271–302 (2002)
Cho, G.C., Choi, N.S., Rim, C.T., Cho, G.H.: Modeling, analysis and control of static var compensator using three-level inverter. IEEE Conf. Ind. Appl. Soc. Annu. Meet. 1, 837–943 (1992)
Fujita, H., Tominaga, S., Akagi, H.: Analysis and design of a DC voltage-source inverters. IEEE Trans. Ind. Appl. 32(4), 970–978 (1996)
Bina, M.T., Eskandari, M.D.: Consequence of unbalance supplying condition on a distribution staticCompensator. In: IEEE 35th annual conference on power electronics specialists, PESC’04. Vol. 5, 20–25 June 2004, Aachen, Germany, pp. 3900–3904
Calvaer, A.J.: Voltage Stability and Collapses: a Simple Theory Based on Real and Reactive Currents. RGE: Revue Generale D’Electricite-N\(^{\circ }\)8, pp. 1–17 (1986)
Cho Guk, C., Jung Gu, H., Choi Nam, S., Cho Gyu, H.: Control of VAR compensator (SVC) with DC voltage regulation and fast dynamics by feedforward and feedback loop. In: IEEE_26th conference on power electronics, PESC’95, Vol. 1, 18–22 June 1995, pp. 367–374 (1995)
Frank, S., Rebennack, S.: An Introduction to Optimal Power Flow: Theory, Formulation, and Examples. In: IIE Transactions, Vol. 0, Issue 0, May 2016. Taylor & Francis (2016)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Model of the grid-side
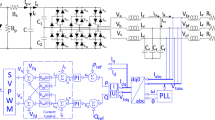
Figure 30 shows the grid-side inverter with DC source. To achieve bidirectional current flow through the converter, every switch is accompanied by an antiparallel diode. The switched converter in normal operation produces current through neuter point N, for different characteristics, depending on the operating conditions. This current flow creates an unbalance (charge and discharge of the DC side of capacitors) in the DC voltage to every capacitance capacitor \(C_{dc} \). Usually with a finite value capacitors, the converter requires a special modulation algorithm that achieves a balanced DC side voltage [31].
This model is based on following simplifying assumptions [32–36]:
-
All switches are supposed ideal.
-
The three alternative source of voltages are balanced.
-
The harmonics due the opening and closing actions of the switches are negligible.
-
All voltage dips on the source side of inverter are represented by the resistor \({R}_{f}\).
-
The currents and voltages in the capacitors are equal.
Using matrix representation, the three-phase abc system model of the network grid side is given by the following system of equations:
From the second hypothesis, the voltages of the three-phase source are:
where \(V_s\) is the efficient phase voltage of the source. \(\delta \) is the phase angle between the fundamental voltages of the source and the inverter output voltages.
The Park transformation of Eq. (33) is given by:
The system is balanced, so the homopolar part is zero. The model becomes:
From Eq. (35), the model of the source-side currents is given by:
From the third hypothesis can be defined the pulse functions as follows:
where \(S_a ,S_b ,S_c \) are the equivalent switches respectively for phase “a”: \(S_{a1} \) and \(S_{a2} \), phase B: \(S_{b1} \) and \(S_{b2}\) and phase C: \(S_{c1} \) and \(S_{c2}\).
The voltages supplied by the inverter, considering only the fundamental component of the voltage (i.e. in the absence of harmonics), are expressed in terms of the DC link voltage and the switching functions as:
Since the system is balanced, the Park transformation of equation (38) is written as:
where D is the inverter conversion ratio between the fundamental of the output voltage and the DC voltage [37]:
The magnitude MI is given by:
Substituting (34) and (39) into (36) gives:
Based on the previous assumptions, the DC link current is:
In the (d, q) axes:
where \(M_p \) is the Park transformation matrix:
The voltage on the capacitor is given by:
Combining Eqs. (44) and (46) gives:
Finally, combining Eq. (47) with Eq. (42), yields the following nonlinear Park model of the source current and DC link voltage.
Appendix B: Linearised model of the grid-side
From the state Eq. (46), it can be seen that the control parameter \(\delta \). takes the form of \(\sin \delta \) and \(\cos \delta \). In addition, the state matrix depends on the inverter conversion ratio D which is not constant. Therefore, the system is non-linear. The reactive component of the current \(i_q \) of the source is zero (the system is operating at unity power factor), in this case phase shift \(\delta \) between the fundamental voltages of the source and those of the inverter output voltage is almost zero (\(\delta \approx 0)\). The model can therefore be linearized based on the following assumptions [38]:
-
The second order terms are of the perturbed variables are negliglected.
-
The value \(\delta _0\) operating point is zero.
The \(\Delta -\)notation is introduced to indicate perturbed values.
Applying a small perturbation to the system gives:
where the Park transformation of the source voltage and the inverter output voltages are given by [38]:
Using the trigonometric development of sin(\(\delta \) \(_{0}\) +\(\delta \) \(_{\Delta })\) and cos(\(\delta \) \(_{0}\) +\(\delta \) \(_{\Delta })\), Eq. (50) becomeS:
Quantities with subscript 0 are equal to those of the initial conditions (\(\delta _0 =0)\). Using the following approximations [39]:
The linearised model of the system (51) can be written as:
Substituting Eq. (51) into (49), and assuming that the initial value of the current source is zero gives:
Finally, the linearised state-space model of the MIMO system can be written in matrix form as:
where x is the state vector \(x=\left[ {i_{q\Delta } i_{d\Delta } v_{dc\Delta } } \right] ^{T},\) and u is the input vector \(u=\left[ {\delta _\Delta D_\Delta } \right] ^{T}\).
A and B are the state matrix and control or input matrix respectively and are given by
The system transfer matrix is calculated using :
Appendix C: Model parameters
See Table 1.
Rights and permissions
About this article

Cite this article
Fouad, K., Boulouiha, H.M., Allali, A. et al. Multivariable control of a grid-connected wind energy conversion system with power quality enhancement. Energy Syst 9, 25–57 (2018). https://doi.org/10.1007/s12667-016-0223-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12667-016-0223-7