
Abstract
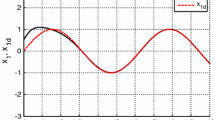
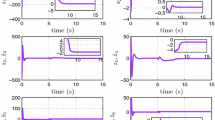
In the present paper, the observer-based composite adaptive terminal sliding-mode control is investigated for the nonlinear uncertain system. First, an adaptive observer is designed to estimate the unavailable high-order derivative of the output. Then, a new dynamic terminal sliding surface is proposed with a state filter, which aims to develop the dynamic terminal sliding mode controller. By the composite adaptive control methods, a new adaptive law is designed, and the stability of the overall system is proofed based on the Lyapunov method. Finally, some numerical simulations are conducted to validate the effectiveness of the proposed algorithm.
Similar content being viewed by others

References
Y. Wei, J. H. Park, and J. Qiu, “Sliding mode control for semi–Markovian jump systems via output feedback,” Automatica, vol. 81, pp. 133–141, April 2017.
W. Qi and G. Zong, “Observer–based adaptive SMC for nonlinear uncertain singular semi–Markov jump systems with applications to DC motor,” IET Control Theory and Applications, vol. 11, pp. 1504.1513, 2017.
K. Park and T. Tsuji, “Terminal sliding mode control of second–order nonlinear uncertain systems,” Int. J. Robust Nonlinear Control, vol. 9, pp. 769–780, 1999.
Y. Feng, X. Yu, and Z. Man, “Nonsingular terminal sliding mode control of rigid robot manipulators,” Automatica, vol. 38, pp. 2159.2167, 2002.
J. Liu and F. Sun, “A novel dynamic terminal sliding mode control of uncertain nonlinear systems,” Journal of Control Theory and Applications, vol. 5, no. 2, pp. 189–193, 2007.
M. Chen, Q. Wu, and R. Cui, “Terminal sliding mode tracking control for a class of SISO uncertain nonlinear systems,” ISA Transactions, vol. 52, pp. 198–206, 2013.
J. Xiong and G. Zhang, “Global fast dynamic terminal sliding mode control for a quadrotor UAV,” ISA Transactions, vol. 66, pp. 233–240, 2017.
M. Zak, “Terminal attractors for addressable memory in neural networks,” Physics Letter, vol. 133, no. 12, pp. 18–22, 1988.
C. Yu, M. Xie, and J. Xie, “Sliding mode tracking control of nonlinear system with non–matched uncertainties,” Journal of Shanghai Jiaotong University, vol. 35, no. 8, pp. 1141–1143, 2001.
S. Mobayen and F. Tchier, “A novel robust adaptive second–order sliding mode tracking control technique for uncertain dynamical systems with matched and unmatched disturbances,” International Journal of Control, Automation and Systems, vol. 15, no. 3, pp. 1197–1106, 2017.
X. Ma, F. Sun, H. B. Li, and B. He, “Neural–networkbased integral sliding–mode tracking control of secondorder multi–agent systems with unmatched disturbances and completely unknown dynamics,” International Journal of Control, Automation and Systems, vol. 15, no. 3, pp. 1925–1935, 2017.
M. Chen, C. Chen, and F. Yang, “An LTR–observer based dynamic sliding mode control for chattering reduction,” Automatica, vol. 453, pp. 1111.1116, 2007.
J. Slotine and W. Li, Applied Nonlinear Control, Prentice–Hall, Englewood Cliffs, NJ, 1991.
J. Nakanishi, J. Farrell, and S. Schaal, “Composite adaptive control with locally weighted statistical learning,” Neural Networks, vol. 18, pp. 71–90, 2005.
P. Ioannou and J. Sun, Robust Adaptive Control, Prentice Hall, Englewood Cliffs, NJ, 1996.
Y. Leu, T. Lee, and W. Wang, “Observer–based adaptive fuzzy–neural control for unknown nonlinear dynamical systems,” IEEE Trans. Systems Man Cybernet. Part B: Cybernet, vol. 29, pp. 583–591, 1999.
C. Kung and T. Chen, “Observer–based indirect adaptive fuzzy sliding mode control with state variable filter for unknown nonlinear dynamical systems,” Fuzzy Set and Systems, vol. 155, pp. 292–308, 2005.
A. Boulkroune, M. Tadjine, M. M’Saad, and M. Farza, “How to design a fuzzy adaptive controller based on observers for uncertain affine nonlinear systems,” Fuzzy Set and Systems, vol. 159, pp. 926–948, 2008.
C. Hyun, C. Park, and S. Kim, “Takagi–Sugeno fuzzy model based indirect adaptive fuzzy observer and controller design,” Information Sciences, vol. 180, pp. 2314.2327, 2010.
Y. Wang, T. Chai, and Y. Zhang, “State observer–based adaptive fuzzy output–feedback control for a class of uncertain nonlinear systems,” Information Sciences, vol. 180, pp. 5029.5040, 2010.
Y. Wei, J. H. Park, H. R. Karimi, and Y. C. Tian, “Improved stability and stabilization results for stochastic synchronization of continuous–time semi–Markovian jump,” IEEE Transactions on Neural Networks and Learning Systems, vol. 29, no. 6, pp. 2488–2501, 2018.
Y. Wei, J. Qiu, and H. R. Karimi, “Fuzzy–affine–modelbased memory filter design of nonlinear systems with timevarying delay,” IEEE Transactions on Fuzzy Systems, vol. 26, no. 2, pp. 504–517, 2018.
M. Zeinali and L. Notash, “Adaptive sliding mode control with uncertainty estimator for robot manipulators,” Mechanism and Machine Theory, vol. 45, pp. 80–90, 2010.
C. Veluvolu and D. Lee, “Sliding mode high–gain observers for a class of uncertain nonlinear systems,” Applied Mathematics Letters, vol. 24, pp. 329–334, 2011.
H. Li, P. Shi, D. Yao, and L. Wu, “Observer–based adaptive sliding mode control for nonlinear Markovian jump systems,” Automatica, vol. 64, pp. 133–142, 2016.
C. C. Hang, “On state variable filters for adaptive system design,” IEEE Trans. Automatic Control, vol. 21, no. 6, pp. 874–876, 1976.
E. Lavretsky, “Combined/composite model reference adaptive control,” IEEE Trans. Automatic Control, vol. 54, no. 11, pp. 2692–2697, 2009.
Y. Pan, Y. Zhou, T. Sun, and J. Meng, “Composite adaptive fuzzy H¥ tracking control of uncertain nonlinear systems,” Neurocomputing, vol. 99, pp. 15–24, 2013.
P. Ioannou and P. Kokotovic, “Instability analysis and improvement of robustness of adaptive control,” Automatica, vol. 20, pp. 583–594, 1984.
S. Blazic, D. Matko, and I. Skrjanc, “Adaptive law with a new leakage term,” IET Control Theory Appl., vol. 4, no. 9, pp. 1533–1542, 2010.
H. Khalil, Nonlinear Systems, Prentice–Hall, Englewood Cliffs, NJ, 2002.
H. Yong, L. Lewis, and T. Chaouki, “A dynamic recurrent neural–network–based adaptive observer for a class of nonlinear systems,” Automatica, vol. 33, pp. 1539.1543, 2003.
B. B. Letswamotse, R. Malekian, C. Y. Chen, K. M. Modieginyane, “Software defined wireless sensor networks (SDWSN): a review on efficient resources, applications and technologies,” Journal of Internet Technology, vol. 19, no. 5, pp. 1303–1313, 2018.
X. Jin, J. Shao, X. Zhang, W. An, and R. Malekian, “Modeling of nonlinear system based on deep learning framework,” Nonlinear Dynamics, vol. 84, no. 3, pp. 1327–1340, 2016.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor Jessie (Ju H.) Park. This journal was supported by the National Science Foundation of China (No. 51709248 and 51505475), UOW VC Fellowship, and the National Research Foundation of South Africa (No. IFR160118156967 and RDYR160404161474). The authors would like to express their gratitude for the reviewerss constructive comments.
Xiaofei Liu is a master student at School of Engineering, Ocean University of China. Her research interests include nonlinear control, adaptive control, and system identification.
Shengbo Qi is an Associate Professor at School of Engineering, Ocean University of China. He received the PhD degree in Mechatronic Engineering from Shandong University in 2011. His research interests include nonlinear control and adaptive control.
Reza Malekian is an Associate Professor and Head of Advanced Sensor Networks Research Group in the Department of Electrical, Electronic, and Computer Engineering, at the University of Pretoria, South Africa. His current research interests include advanced sensor networks, Internet of Things, and mobile communications. Dr. Malekian is also a Chartered Engineer and a Professional Member of the British Computer Society. He is an Associate Editor for IEEE Internet of Things Journal.
Zhixiong Li received his Ph.D. degree in Transportation Engineering from Wuhan University of Technology, China in 2013. His research interests include mechanical system modeling and control. He is an associate editor for the Journal of IEEE Access.
Rights and permissions
About this article

Cite this article
Liu, X., Qi, S., Malekain, R. et al. Observer-based Composite Adaptive Dynamic Terminal Sliding-mode Controller for Nonlinear Uncertain SISO Systems. Int. J. Control Autom. Syst. 17, 94–106 (2019). https://doi.org/10.1007/s12555-018-0117-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-018-0117-7