
Abstract
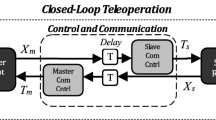
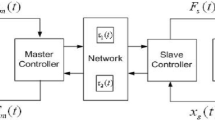
In traditional dual-user shared control teleoperation, the users’ operational transparency is influenced by the dominance factorα. Especially when α = 1 and α = 0 the trainer or trainee cannot receive any information form the slave side. For enlarging the control flexibility and enhancing the system transparency, a novel method with multiple adaptive dominance factors is proposed in this paper. An ideal application of this method is on-line operation and supervision. The supervisor and operator can adjust the factors and switch the operation roles and states freely. Once the slave robot handled by the operator diverges from the planned path, the dominance factors will change adaptive to limit the operator’s movement. The adaptive principles are concluded from the dynamic performance measured by the measuring functions. The conclusions suggest that the varying range of the system dynamic performance is wider than the traditional method. In addition, considering the time delays between the slave and master sides, we proved the system stability conditions covering all the range of dominance factors. Finally, we make a discussion of the applying area of the novel shared control architecture.
Similar content being viewed by others

References
J. S. Kang, M. C. Lee, and S. M. Yoon, “Bilateral control based rupture protection method in surgical robot using improved master device,” International Journal of Control, Automation and Systems, vol. 14, no. 4, pp. 1–8, 2016.
S. Y. Ko, W.-J. Lee, and D.-S. Kwon, “Intelligent interaction based on a surgery task model for a surgical assistant robot: Awareness of current surgical stages based on a surgical procedure model,” International Journal of Control, Automation and Systems, vol. 8, no. 4, pp. 782–792, August 2010. [click]
S. M. Yoon, W. J. Kim, and M. C. Lee, “Design of bilateral control for force feedback in surgical robot,” International Journal of Control, Automation and Systems, vol. 13, no. 4, pp. 916–925, August 2015. [click]
Z. Li, L. Ding, H. Gao, G. Duan, and C.-Y. Su, “Trilateral teleoperation of adaptive fuzzy force/motion control for nonlinear teleoperators with communication random delays,” IEEE transactions on Fuzzy Systems, vol. 21, no. 4, pp. 610–624, August 2013.
Z. Li, Y. Xia, and F. Sun, “Adaptive fuzzy control for multilateral cooperative teleoperation of multiple robotic manipulators under random network-induced delays,” IEEE Transactions on Fuzzy Systems, vol. 22, no. 2, pp. 437–450, April 2014.
J. Wu, Y. Shi, J. Huang, and D. Constantinescu, “Stochastic stabilization for bilateral teleoperation over networks with probabilistic delays,” Mechatronics, vol. 22, pp. 1050–1059, 2012. [click]
B. Chebbi, D. Lazaroff, F. Bogsany, P. X. Liu, L. Ni, and M. Rossi, “Design and implementation of a collaborative virtual haptic surgical training system,” Proc. of IEEE International Mechatronics and Automation, pp. 315–320, 2005.
S. S. Nudehi, R. Mukherjee, M. Ghodoussi, “A sharedcontrol approach to haptic interface design for minimally invasive telesurgical training,” IEEE Transactions on Control Systems Technology, vol. 13, no. 4, pp. 588–592, July 2005.
B. Khademian and K. Hashtrudi-Zaad, “A four-channel multilateral shared control architecture for dual-user teleoperation systems,” Proc. of IEEE/RSJ International Intelligent Robots and Systems, pp. 2660–2666, 2007.
B. Khademian and K. Hashtrudi-Zaad, “Dual-user teleoperation systems: New multilateral shared control architecture and dynamic performance measures,” IEEE/ASME Transactions on Mechatronics, vol. 17, no. 5, pp. 895–906, October 2012.
B. Khademian and K. Hashtrudi-Zaad, “Novel shared control architectures for enhanced users’ interaction in haptic training simulation systems,” Proc. of IEEE/RSJ International Intelligent Robots and Systems, pp. 886–892, 2009.
B. Khademian and K. Hashtrudi-Zaad, “A robust multilateral shared controller for dual-user teleoperation systems,” Proc. of Canadian Conference on Electrical and Computer Engineering, pp. 1871–1876, May 2008.
B. Khademian and K. Hashtrudi-Zaad, “Unconditional stability analysis of dual-user teleoperation systems,” Proc of IEEE Haptics Symposium, pp. 161–166, 2010.
B. Khademian and K. Hashtrudi-Zaad, “A framework for unconditional stability analysis of multimaster/ multislave teleoperation systems,” IEEE Transactions on Robotics, vol. 29, no. 3, pp. 684–694, June 2013.
K. Razi and K. Hashtrudi-Zaad, “Analysis of coupled stability in multilateral dual-user teleoperation systems,” IEEE Transactions on Robotics, vol. 30, no. 3 pp. 631–641, June 2014.
J. Li, M. Tavakoli, and Q. Huang, “Absolute stability of multiple dof multilateral haptic systems, ” IEEE Transactions on, Control Systems Technology, vol. 22, no. 6, pp. 2319–2328, November 2014.
M. Shahbazi, H. Talebi, S. F. Atashzar, F. Towhidkhah, R. V. Patel, and S. Shojaei, “A new set of desired objectives for dual-user systems in the presence of unknown communication delay,” Proc. of IEEE/ASME International Advanced Intelligent Mechatronics, pp. 146–151, 2011.
M. Shahbazi, H. Talebi, and M. Yazdanpanah, “A control architecture for dual user teleoperation with unknown time delays: A sliding mode approach,” Proc. of IEEE/ASME International Advanced Intelligent Mechatronics, pp. 1221–1226, 2010.
M. Shahbazi, H. Talebi, and F. Towhidkhah, “A robust control architecture for dual user teleoperation system with time-delay,” Proc. of IEEE Industrial Electronics Society, pp. 1419–1423, 2010.
P. F. Huang, M. Wang, Z. J. Meng, F. Zhang, and Z. X. Liu, “Attitude takeover control for post-capture of target spacecraft using space robot,” Aerospace Science and Technology, vol. 51, pp. 171–180, April 2016. [click]
P. F. Huang, M. Wang, Z. J. Meng, F. Zhang, Z. X. Liu, and H. T. Chang, “Reconfigurable spacecraft attitude takeover control in post-capture of target by space manipulators,” Journal of The Franklin Institute, vol. 353, no. 9, pp. 1985–2008, June 2016.
S. A. guo, D. Morris, and J. E. Colgate, “Haptic telemanipulation of soft environment without direct force feedback,” Proc of IEEE International Conference on Information Acquisition, pp. 21–25, 2005.
R. Saravanakumar, M. Syed Ali, J. Cao, and H. Huang “H ∞ state estimation of generalised neural networks with interval time-varying delays,” International Journal of Systems Science, vol. 47, no. 16, pp. 3888–3899, 2016. [click]
R. Saravanakumar, M. Syed Ali, and H. R. Karimi. “Robust H ∞ control of uncertain stochastic Markovian jump systems with mixed time-varying delays,” International Journal of Systems Science, vol. 48, no. 4, pp. 862–872, 2016. [click]
R. Saravanakumar and M. Syed Ali. “Robust H ∞ control for uncertain Markovian jump systems with mixed delays,” Chinese Physics B, vol. 25, no. 7, pp. 070201, 2016.
B. Niu and Z. Jun, “Barrier Lyapunov functions for the output tracking control of constrained nonlinear switched systems,” Systems and Control Letters, vol. 62, no. 10, pp. 963–971, 2013. [click]
P. F. Huang, D. K. Wang, Z. J. Meng, F. Zhang, and Z. X. Liu, “Impact dynamic modelling and adaptive target capturing control for tethered space robots with uncertainties,” IEEE/ASME Transactions on Mechatronics, vol. 21 no. 5, pp. 2260–2271, October 2016.
P. F. Huang, D. K. Wang, Z. J. Meng, F. Zhang, and J. Guo, “Adaptive postcapture backstepping control for tumbling tethered space robot-target combination,” Journal of Guidance, Control and Dynamics, vol. 39, no. 1, pp. 150–156, January 2016. [click]
P. F. Huang, F. Zhang, Z. J. Meng, and Z X. Liu, “Adaptive control for space debris removal with uncertain kinematics, dynamics and states,” Acta Astronautica, vol. 128 pp. 416–430, November 2016. [click]
M. Shahbazi, S. F. Atashzar, and R. V. Patel, “A framework for supervised robotics-assisted mirror rehabilitation therapy,” Proc of IEEE/RSJ International Intelligent Robots and Systems, pp. 3567–3572, 2014.
F. Liu, A. Lelev, E. D. Eberard, and T. Redarce, “A dualuser teleoperation system with Online Authority Adjustment for haptic training,” Proc of IEEE International Engineering in Medicine and Biology Society (EMBC), pp. 1168–1171, 2015.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Jun Yoneyama under the direction of Editor Myo Taeg Lim. This work was supported by Natural Science and the National Nature Science Foundation of China (Grant No. 11272256,61005062).
Zhenyu Lu received his B.S. and M.S. degrees from China University of Mining and Technology and Shenyang Aerosapce University, in 2010 and 2012, respectively. He is currently a Ph.D. candidate of School of Astronautics, Northwestern Polytechnical University. His research interests include Space Teleoperation, Man-Robotics Interaction and system identification.
Panfeng Huang received his B.S. and M.S. degrees from Northwestern Polytechnical University, in 1998 and 2001, respectively, and his Ph.D. degree from the Chinese University of Hong Kong in the area of Automation and Robotics in 2005. He is currently a Professor of School of Astronautics and Vice Director of Research Center for Intelligent Robotics at the Northwestern Polytechnical University. His research interests include modeling, kinematics, dynamics, trajectory planning, and control of space robots.
Pei Dai received his B.S. degree in detection guidance and control engineering from Northwestern Polytechnical University, Xi’an, China, in 2014. He is currently a graduate student in Research Center of Intelligent Robot, Northwestern Polytechnical University. His research interests include teleoperation and human-computer interaction.
Zhengxiong Liu received his Ph.D. degree from Northwestern Plolytechnical University in 2012. He is currently a lecturer at the School of Astronautics, Northwestern Polytechnical University, China. His research interests include Space Teleoperation, Multi-body Dynamics, and Man-Machine Interaction.
Zhongjie Meng received his Ph.D. degree from Northwestern Polytechnical University in 2010. He is currently an associate professor at the School of Astronautics, Northwestern Polytechnical University, China. His research interests include dynamics and control of tethered space robots, and intelligent spacecraft system.
Rights and permissions
About this article

Cite this article
Lu, Z., Huang, P., Dai, P. et al. Enhanced transparency dual-user shared control teleoperation architecture with multiple adaptive dominance factors. Int. J. Control Autom. Syst. 15, 2301–2312 (2017). https://doi.org/10.1007/s12555-016-0467-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-016-0467-y