
Abstract
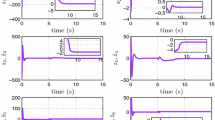
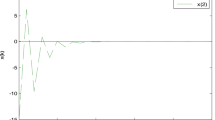
In this paper, the sliding mode dynamic disturbance decoupling tracking control method based on the linear extended state observer (LESO) is proposed for a class of square multivariable nonlinear uncertain system. The model plant contains the known linear dynamics, the unknown nonlinear dynamics and the internal and external disturbances, and the various input-output pairs are interacted. The system states are not available for measurement. An improved LESO is developed. The leading feature which is different from the typical ESO lies in that its extended state does not contain the known linear dynamics. The improved LESO can guarantee the error variables to be uniformly ultimately bounded with respect to a ball whose radius is a function of design parameters. So this ball radius can be arbitrarily as small as desired by tuning design parameters. And we give a simple method by which the gain parameters of LESO can be computed easily. This estimation to the total disturbance of the original system is introduced into the sliding mode control design to complete disturbance rejection and decoupling. Rigorous stability analysis shows that the system output can track the desired signal closely. Finally, a class of mass–spring–damper system is taken to make the numerical simulation analysis to illustrate the effectiveness of the proposed control method.
Similar content being viewed by others

References
D. Chen and D. E. Seborg, “Design of decentralized PI control systems based on Nyquist stability analysis,” Journal of Process Control, vol.13, no.1, pp.27–39, 2003.
J. Lee, D. H. Kim and T. F. Edgar, “Static decouplers for control of multivariable processes,” AIChE Journal, vol. 51, no.10, pp. 2712–2720, 2005.
D. Pomerleau and A. Pomerleau, “Guide lines for the tuning and the evaluation of decentralized and decoupling controllers for processes with recirculation,” ISA Transaction, vol. 40, no. 4, pp. 341–351, 2001. [click]
B. Chen, S. C. Tong, and X. P. Liu, “Fuzzy approximate disturbance decoupling of MIMO nonlinear systems by backstepping approach,” Fuzzy Sets and Systems, vol. 158, no. 10, pp. 1097–1125, 2007. [click]
Y. J. Liu, S. C. Tong, and W. Wang, “Adaptive fuzzy output tracking control for a class of uncertain nonlinear systems,” Fuzzy Sets and Systems, vol. 160, no. 19, pp. 2727–2754, 2009. [click]
Y. J. Liu, W. Wang, S. C. Tong, and Y. S. Liu, “Robust adaptive tracking control for nonlinear systems based on bounds of fuzzy approximation parameters,” IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans, vol. 40,no.1, pp. 170–184, 2010. [click]
Y. J. Liu, S. C. Tong, and T. S. Li, “Observer-based adaptive fuzzy tracking control for a class of uncertain nonlinear MIMO systems,” Fuzzy Sets and Systems, vol. 164, no. 1, pp.25–44, 2011.
H. C. Sung, J. B. Park, and Y. H. Joo, “Observer-based sampled-data control for nonlinear systems: robust intelligent digital redesign approach,” International Journal of Control, Automation, and Systems, vol. 12, no. 3, pp. 486–496, 2014. [click]
M. C. Pai, “Observer-based adaptive sliding mode control for robust tracking and model following,” International Journal of Control, Automation, and Systems, vol. 11, no. 2, pp. 225–232, 2013. [click]
J. Q. Han, “Active disturbance rejection controller and its applications,” Control and Decision (in Chinese), vol. 13, no 1, pp. 19–23, 1998.
H. L. Xing, J. H. Jeon, K. C. Park, and I. K. Oh, “Active disturbance rejection control for precise position tracking of ionic polymer-metal composite actuators,” IEEE ASME Transactions on Mechatronics, vol. 18, no. 1, pp. 86–95, 2013.
J. Q. Han, “From PID to active disturbance rejection control,” IEEE Trans. Ind. Electron.,vol.56, no.3, pp. 900–906, 2009.
Z. Gao, “Scaling and bandwith-parameterization based controller tuning,” Proc. of American Control Conference, pp. 4989–4996, 2003.
J. Q. Han, “A class of extended state observers for uncertain system,” Control Decis. (in Chinese), vol. 10, no. 1, pp. 85–88, 1995.
Q. Zheng, Z. Chen, and Z. Gao, “A practical approach to disturbance decoupling control,” Control Eng. Pract., vol. 17, no. 9, pp. 1016–1025, 2009. [click]
Y. C. Chang, “Robust tracking control for nonlinear MIMO systems via fuzzy approaches,” Automatica, vol. 36.no. 10, pp. 1535–1545, 2000. [click]
K. S. Narendra and J. Balakrishnan, “A common Lyapunov function for stable LTI systems with commuting Amatrice,” IEEE Transactions on Automatic Control, vol. 39, no. 12, pp. 2469–2471, 1994. [click]
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Yingmin Jia under the direction of Editor PooGyeon Park. This work is partially supported by the National Natural Science Foundation of China under grants 61374126 and 61379029 and the Natural Science Foundation of Shandong Province under grant ZR2013FM021.
Hai-Long Xing received his B.S. degree in mathematics education from Jiamushi University, Jiamushi, China in 1992, an M.S. degree in management and control theory from Yanshan University, Qinhuandao, China in 2004, and a Ph.D. degree in control theory and application from Ocean University of China, Qingdao, China in 2007. From July 2007 to September 2009, he was a postdoctoral follow at Tsinghua University, Beijng, China. From December 2009 to November 2010, he was a senior researcher at Structural Dynamics and Smart Systems Lab at KAIST. At present, he is an associate professor in Science and Information College, Qingdao Agricultural University. His current research interests include electro-active polymers, modeling and control of smart materials, nonlinear control and fuzzy neural adaptive control theory.
Dong-Hai Li received the Bachelor of Engineering degree in automatic engineering with first class honors, from Military & Mechanical Engineering College in 1984, the Master of Engineering degree in automatic engineering from University of Science & Technology of China in 1990, and Ph.D. degree in automatic control theory from Tsinghua University, China, in 1994. Currently, he is an associate Professor of the State Key Lab of Power Systems, Department of Thermal Engineering, Tsinghua University, China. His research interests include PID tuning, nonlinear control, control system simulation. He was a visiting scholar of Engineering Research Center for Advanced Control and Instrumentation, at School of Electrical Engineers and Computer Science, Seoul National University, from September 1, 2000 to August 30, 2001.
Juan Li received her Ph.D. degree from Ocean University of China in 2008. She is currently a professor at Qingdao Agricultural University and acts as a visiting scholar in University of Alberta now. Her research interests include fault diagnosis, fault-tolerant control, analysis and design of complex systems etc.
Cai-Hong Zhang received her B.S. degree in mathematics education from Ludong University, Yantai, China in 2004, an M.S. degree from Ocean University of China, Qingdao, China in 2007 and a Ph.D. degree in control theory and application from Ocean University of China, Qingdao, China in 2010. From September 2009 to September 2010, she was a visiting scholar at University of Minnesota Duluth, USA. Her research interests include nonlinear control and model theory.
Rights and permissions
About this article

Cite this article
Xing, HL., Li, DH., Li, J. et al. Linear extended state observer based sliding mode disturbance decoupling control for nonlinear multivariable systems with uncertainty. Int. J. Control Autom. Syst. 14, 967–976 (2016). https://doi.org/10.1007/s12555-014-0420-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-014-0420-x