
Abstract
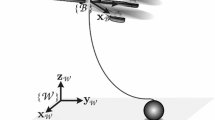
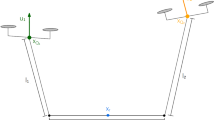
We derived a coordinate-free form of equations of motion for a complete model of a quadrotor UAV with a payload which is connected via a flexible cable according to Lagrangian mechanics on a manifold. The flexible cable is modeled as a system of serially-connected links and has been considered in the full dynamic model. A geometric nonlinear control system is presented to asymptotically stabilize the position of the quadrotor while aligning the links to the vertical direction below the quadrotor. Numerical simulation and experimental results are presented and a rigorous stability analysis is provided to confirm the accuracy of our derivations. These results will be particularly useful for aggressive load transportation that involves large deformation of the cable.
Similar content being viewed by others

References
L. Cicolani, G. Kanning, and R. Synnestvedt, “Simulation of the dynamics of helicopter slung load systems,” Journal of the American Helicopter Society, vol. 40, no. 4, pp. 44–61, 1995.
M. Bernard, “Generic slung load transportation system using small size helicopters,” Proc. of the International Conference on Robotics and Automation, pp. 3258–3264, 2009.
I. Palunko, P. Cruz, and R. Fierro, “Agile load transportation,” IEEE Robotics and Automation Magazine, vol. 19, no. 3, pp. 69–79, 2012.
N. Michael, J. Fink, and V. Kumar, “Cooperative manipulation and transportation with aerial robots,” Autonomous Robots, vol. 30, pp. 73–86, 2011.
I. Maza, K. Kondak, M. Bernard, and A. Ollero, “Multi-UAV cooperation and control for load transportation and deployment,” Journal of Intelligent and Robotic Systems, vol. 57, pp. 417–449, 2010.
D. Mellinger, M. Shomin, N. Michael, and V. Kumar, “Cooperative grasping and transport using multiple quadrotors,” Distributed Autonomous Robotic Systems, Springer Tracts in Advanced Robotics, vol. 83, pp. 545–558, 2013.
D. Zameroski, G. Starr, J. Wood, and R. Lumia, “Rapid swing-free transport of nonlinear payloads using dynamic programming,” Journal of Dynamic Systems, Measurement, and Control, vol. 130, no. 4, p. 041001, June 2008.
J. Schultz and T. Murphey, “Trajectory generation for underactuated control of a suspended mass,” Proc. of IEEE International Conference on Robotics and Automation, pp. 123–129, May 2012.
I. Palunko, R. Fierro, and P. Cruz, “Trajectory generation for swing-free maneuvers of a quadrotor with suspended payload: a dynamic programming approach,” Proc. of IEEE International Conference on Robotics and Automation, RiverCentre, Saint Paul, Minnesota, USA, May 14-18 2012.
T. Lee, M. Leok, and N. McClamroch, “Dynamics and control of a chain pendulum on a cart,” Proc. of the IEEE Conference on Decision and Control, pp. 2502–2508, 2012.
F. Goodarzi, D. Lee, and T. Lee, “Geometric stabilization of a quadrotor UAV with a payload connected by flexible cable,” Proc. of the American Control Conference, Portland, OR, pp. 4925–4930, 2014.
T. Lee, M. Leok, and N. McClamroch, “Geometric tracking control of a quadrotor UAV on SE(3),” Proc. of the IEEE Conference on Decision and Control, pp. 5420–5425, 2010.
M. L. T. Lee and N. McClamroch, “Nonlinear robust tracking control of a quadrotor UAV on SE(3),” Asian Journal of Control, vol. 15, no. 2, pp. 391–408, March 2013.
F. Goodarzi, D. Lee, and T. Lee, “Geometric nonlinear PID control of a quadrotor UAV on SE(3),” Proc. of the European Control Conference, Zurich, July 2013.
T. Lee, Computational Geometric Mechanics and Control of Rigid Bodies, Ph. D. dissertation, University of Michigan, 2008.
T. Lee, M. Leok, and N. H. McClamroch, “Lagrangian mechanics and variational integrators on twospheres,” International Journal for Numerical Methods in Engineering, vol. 79, no. 9, pp. 1147–1174, 2009.
H. Khalil, Nonlinear Systems, 2nd ed., Prentice Hall, 1996.
T. Fernando, J. Chandiramani, T. Lee, and H. Gutierrez, “Robust adaptive geometric tracking controls on SO(3) with an application to the attitude dynamics of a quadrotor UAV,” Proc. of the IEEE Conference on Decision and Control, 7380–7385, 2011.
F. Goodarzi, D. Lee, and T. Lee, “Geometric control of a quadrotor UAV transporting a payload connected via flexible cable,” ArXiv, 2014. [Online]. Available: http://arxiv.org/abs/1407.164v1
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Sung Jin Yoo under the direction of Editor Myotaeg Lim.
This research has been supported in part by NSF under the grants CMMI-1243000 (transferred from 1029551), CMMI-1335008, and CNS-1337722.
Farhad A. Goodarzi received his B.S. and M.S. degrees in Mechanical Engineering from Sharif University of Technology and Santa Clara University, CA, in 2009 and 2011, respectively. Currently, he is a Ph.D. candidate in ME department at The George Washington University. His research interests include control of complex systems and its application such as autonomous load transportation using multiple quadrotor UAV’s.
Daewon Lee received his B.S., M.S. and Ph.D. degrees in Mechanical Engineering from Seoul National University. He is currently a Post doctoral fellow in Mechanical and Aerospace Engineering Department at The George Washington University. His research interests include control theory and its application to control of the quadrotor UAV’s.
Taeyoung Lee is an assistant professor of the Department of Mechanical and Aerospace Engineering at the George Washington University. He received his doctoral degree in Aerospace Engineering and his master’s degree in Mathematics at the University of Michigan in 2008. His research interests include computational geometric mechanics and control of complex systems.
Rights and permissions
About this article

Cite this article
Goodarzi, F.A., Lee, D. & Lee, T. Geometric control of a quadrotor UAV transporting a payload connected via flexible cable. Int. J. Control Autom. Syst. 13, 1486–1498 (2015). https://doi.org/10.1007/s12555-014-0304-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-014-0304-0