
Abstract
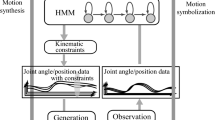
This work presents a new incremental motion learning algorithm through kinesthetic teachings and a new motion production algorithm by combining learned motions in a humanoid robot. The proposed algorithms are useful for improving the motions that a humanoid robot can produce. The learning algorithm consists of data encoding, time alignment, dimensional reduction, parameter estimation in the Gaussian mixture model (GMM) of motions, GMM refinement, and motion generation steps. The overall procedure is built to be incremental. No historic data memorization is required in any step, and model parameters are enough information to generate motions. The motion production algorithm allows a robot to extract new motions simply from learned motions without requiring teaching sessions. A series of experiments with a humanoid robot serves to validate the performance of the proposed algorithms.
Similar content being viewed by others

References
S. Calinon, F. Guenter, and A. Billard, “On learning, representing and generalizing a task in a humanoid robot,” IEEE Trans. Systems, Man and Cybernetics, Part B, vol. 37, no. 2, pp. 286–298, 2007.
A. P. Shon, J. J. Storz, and R. P. N. Rao, “Towards a real-time Bayesian imitation system for a humanoid robot,” Proc. Int Conf Robotics Automation, Roma, Italy, 2007.
A. J. Ijspeert, J. Nakanishi, and S. Schaal, “Trajectory formation for imitation with nonlinear dynamical systems,” Proc. IEEE Int. Conf. Intelligent Robots Systems, pp. 752–757, 2001.
C. G. Atkeson and S. Schaal, “Robot learning from demonstration,” Proc. 14th Int. Conf Machine Learning (ICML), pp. 12–20, July 1997.
P. Pastor, H. Hoffmann, T. Asfour, and S. Schaal, “Learning and generalization of motor skills by learning from demonstration,” Proc. Int. Conf. Robotics Automation, Kobe, Japan, 2009.
C. Breazeal and B. Scassellati, “Robots that imitate humans,” Trends in Cognitive Sciences, vol. 6, no. 11, pp. 481–487, 2002.
A. Billard, S. Calinon, R. Dillmann, and S. Schaal, Robot Programming by Demonstration, B. Siciliano, and O. Khatib (eds.), Handbook of Robotics, pp. 1371–1394, Springer, 2008.
B. Argall, S. Chernova, M. Veloso, and B. Browning, “A survey of robot learning from demonstration,” Robotics and Autonomous Systems, vol. 57, no. 5, pp. 469–483, May 2009.
S. Schaal, “Is imitation learning the route to humanoid robots,” Trends in Cognitive Sciences, vol. 3, no. 6, pp. 233–242, 1999.
M. Hersch, F. Guenter, S. Calinon, and A. Billard, “Dynamic system modulation for robot learning via kinesthetic demonstrations,” IEEE Trans. Robotics, vol. 24, no. 6, pp. 1463–1467, 2008.
S. Calinon and A. Billard, “Incremental learning of gestures by imitation in a humanoid robot,” Proc. IEEE Int. Conf. Human Robot Interaction, Arlington, Virginia, USA, pp. 255–262, 2007.
S. Calinon and A. Billard, “Recognition and reproduction of gestures using a probabilistic framework combining PCA, ICA and HMM,” Proc. 22nd Int. Conf. Mach. Learn., pp. 105–112, 2005.
J. Kwon and F.C. Park, “Natural movement generation using hidden Markov models and principal components,” IEEE Trans. Syst., Man, Cybern. B, Cybern, vol. 38, no. 5, pp. 1184–1194, Oct. 2008.
D. B. Grimes, D. R. Rashid, and R. P. N. Rao, “Learning nonparametric models for probabilistic imitation,” Proc. Adv Neural Inf Process Syst., vol. 19, pp. 521–528, 2006.
C. Wan and L. Liu, “Research and improvement on embedded system application of DTW-based speech recognition,” Proc IEEE Int. Conf. ASID, 2008.
E. J. Keogh and M. J. Pazzani, “Derivative Dynamic Time Warping,” First SIAM Int. Conf. Data Mining, Chicago, IL, 2001.
E. Keogh and C. Ratanamahatana, “Exact indexing of dynamic time warping,” Knowledge and Information Systems, vol. 7, pp. 358–386, 2005.
A. Dempster, A. Laird, and D. Rubin, “Maximum likelihood from incomplete data via the EM algorithm,” Journal of the Royal Statistical Society, Series B, vol. 39, no. 1, pp. 1–38, 1977.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editorial Board member Youngjin Choi under the direction of Editor Hyoukryeol Choi.
This work was supported by the Korea government (MEST) under a KRF grant (No. 2010-0015226) and by the Korea government (MKE) under the Human Resources Development Program for Convergence Robot Specialists.
Sumin Cho received his B.S. degree in the Department of Computer Science from Korea Advanced Institute of Science and Technology, Daejeon, Korea, in 2010. He will soon complete an M.S. degree and pursue a Ph.D. degree in Computer Science from Korea Advanced Institute of Science and Technology, Daejeon, Korea. His research interests include human-robot interaction, and intelligent robotics.
Sungho Jo received his B.S. degree in the School of Mechanical & Aerospace Engineering from Seoul National University, Seoul, Korea, in 1999. He completed an M.S. degree in Mechanical Engineering and a Ph.D. degree in Electrical Engineering and Computer Science from Massachusetts Institute of Technology, Cambridge, MA, in 2001 and 2006, respectively. From 2006 to 2007, he was a Postdoctoral Researcher at the MIT Media Lab, Cambridge, MA. Since 2007, he has been an Assistant Professor in the Department of Computer Science at Korea Advanced Institute of Science and Technology, Daejeon, Korea. His research interests include human-robot interaction, biomimetic robots, and brain-machine interface.
Rights and permissions
About this article
Cite this article
Cho, S., Jo, S. Incremental motion learning through kinesthetic teachings and new motion production from learned motions by a humanoid robot. Int. J. Control Autom. Syst. 10, 126–135 (2012). https://doi.org/10.1007/s12555-012-0114-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-012-0114-1