
Abstract
In the modern industry, electro-hydraulic actuators (EHAs) have been applied to various applications for precise position pressure/ force control tasks. However, operating EHAs under sensor faults is one of the critical challenges for the control engineers. For its enormous nonlinear characteristics, sensor fault could lead the catastrophic failure to the overall system or even put human life in danger. Thus in this paper, a study on mathematical modeling and fault tolerant control (FTC) of a typical EHA for tracking control under sensor-fault conditions has been carried out. In the proposed FTC system, the extended Kalman-Bucy unknown input observer (EKBUIO) -based robust sensor fault detection and identification (FDI) module estimates the system states and the time domain fault information. Once a fault is detected, the controller feedback is switched from the faulty sensor to the estimated output from the EKBUIO owing to mask the sensor fault swiftly and retains the system stability. Additionally, considering the tracking accuracy of the EHA system, an efficient brain emotional learning based intelligent controller (BELBIC) is suggested as the main control unit. Effectiveness of the proposed FTC architecture has been investigated by experimenting on a test bed using an EHA in sensor failure conditions.
Similar content being viewed by others

Abbreviations
- A h :
-
head side piston area
- A r :
-
rod side piston area
- A v :
-
valve opening area
- C v :
-
valve discharge coefficient
- D :
-
pump displacement
- d s k :
-
position sensor fault information of EHA
- E max :
-
the bulk modulus of the hydraulic fluid
- frc :
-
friction force between cylinder wall and piston
- F load :
-
applied load on the cylinder
- l :
-
cylinder length
- m :
-
piston mass
- N :
-
pump rotation per minute (RPM)
- P 1 :
-
pump pressure
- P h :
-
head side pressure
- P r :
-
rod side pressure
- P rel :
-
relief valve settling pressure
- ρ :
-
hydraulic fluid density
- Q pump :
-
pump flow rate
- V c :
-
control voltage of the servo motor
- x p :
-
cylinder piston position
- Q 1 :
-
inlet flow rate to the cylinder
- Q 2 :
-
outlet flow rate from the cylinder
- Q rel :
-
flow rate through relief valve
References
Kim, M. Y. and Lee, C.-O., “An Experimental Study on the Optimization of Controller Gains for an Electro-Hydraulic Servo System using Evolution Strategies,” Control Engineering Practice, Vol. 14, No. 2, pp. 137–147, 2006.
Rahmfeld, R. and Monika, I., “Displacement Controlled Linear Actuator with Differential Cylinder-A Way to Save Primary Energy in Mobile Machines,” Proc. of ICFP: 5th International Conference on Fluid Power Transmission and Control, pp. 296–301, 2001.
Zarei, J. and Shokri, E., “Robust Sensor Fault Detection based on Nonlinear Unknown input Observer,” Measurement, Vol. 48, pp. 355–367, 2014.
Pierri, F., Paviglianiti, G., Caccavale, F., and Mattei, M., “Observerbased Sensor Fault Detection and Isolation for Chemical Batch Reactors,” Engineering Applications of Artificial Intelligence, Vol. 21, No. 8, pp. 1204–1216, 2008.
Petersen, I. R. and McFarlane, D. C., “A Methodology for Robust Fault Detection in Dynamic Systems,” Control Engineering Practice, Vol. 12, No. 2, pp. 123–138, 2004.
Hashemi, A. and Pisu, P., “Fault Diagnosis in Automotive Alternator System Utilizing Adaptive Threshold Method,” Proc. of Annual Conference of Prognostics and Health Management Society, pp. 25–29, 2011.
Odgaard, P. F. and Stoustrup, J., “Unknown Input Observer based Detection of Sensor Faults in a Wind Turbine,” Proc. of IEEE International Conference on Control Applications, pp. 310–315, 2010.
Zarei, J. and Poshtan, J., “Design of Nonlinear Unknown Input Observer for Process Fault Detection,” Industrial & Engineering Chemistry Research, Vol. 49, No. 22, pp. 11443–11452, 2010.
Giridhar, A. and El-Farra, N. H., “A Unified Framework for Detection, Isolation and Compensation of Actuator Faults in Uncertain Particulate Processes,” Chemical Engineering Science, Vol. 64, No. 12, pp. 2963–2977, 2009.
Chengzhi, C., Zhang, W., and Xiaoxiong, L., “Application of Analytic Redundancy-based Fault Diagnosis of Sensors to Onboard Maintenance System,” Chinese Journal of Aeronautics, Vol. 25, No. 2, pp. 236–242, 2012.
Isermann, R., “Model-based Fault-Detection and Diagnosis-Status and Applications,” Annual Reviews in Control, Vol. 29, No. 1, pp. 71–85, 2005.
Puig, V., Quevedo, J., Escobet, T., and de las Heras, S., “Passive Robust Fault Detection Approaches using Interval Models,” IFAC Proceedings Volumes, Vol. 35, No. 1, pp. 443–448, 2002.
An, L. and Sepehri, N., “Hydraulic Actuator Leakage Fault Detection using Extended Kalman Filter,” International Journal of Fluid Power, Vol. 6, No. 1, pp. 41–51, 2005.
Li, H., Yang, C., Hu, Y., Zhao, B., Zhao, M., and Chen, Z., “Fault-Tolerant Control for Current Sensors of Doubly Fed Induction Generators based on an Improved Fault Detection Method,” Measurement, Vol. 47, pp. 929–937, 2014.
Zarei, J. and Poshtan, J., “Sensor Fault Detection and Diagnosis of a Process using Unknown Input Observer,” Mathematical and Computational Applications, Vol. 16, No. 4, pp. 1010–1021, 2011.
Alwi, H., Edwards, C., and Tan, C. P., “Fault Detection and Fault-Tolerant Control using Sliding Modes,” Springer Science & Business Media, pp. 7–27, 2011.
Chan, C. W., Jin, H., Cheung, K. C., and Zhang, H. Y., “Fault Detection of Systems with Redundant Sensors using Constrained Kohonen Networks,” Automatica, Vol. 37, No. 10, pp. 1671–1676, 2001.
Govindaraj, S., “Calculation of Sensor Redundancy Degree for Linear Sensor Systems,” M.Sc. Thesis, Department of Industrial Engineering, University of Iowa, 2010.
Niksefat, N. and Sepehri, N., “A QFT Fault-Tolerant Control for Electrohydraulic Positioning Systems,” IEEE Transactions on Control Systems Technology, Vol. 10, No. 4, pp. 626–632, 2002.
Mendonça, L. F., Sousa, J. M. C., and Sa da Costa, J. M. G., “Fault Tolerant Control using a Fuzzy Predictive Approach,” Expert Systems with Applications, Vol. 39, No. 12, pp. 10630–10638, 2012.
Shang, W., Zhou, X., and Yuan, J., “An Intelligent Fault Diagnosis System for Newly Assembled Transmission,” Expert Systems with Applications, Vol. 41, No. 9, pp. 4060–4072, 2014.
Fu, X., Liu, B., Zhang, Y., and Lian, L., “Fault Diagnosis of Hydraulic System in Large Forging Hydraulic Press,” Measurement, Vol. 49, pp. 390–396, 2014.
Im, J. S., Ozaki, F., Yeu, T. K., and Kawaji, S., “Model-based Fault Detection and Isolation in Steer-by-Wire Vehicle using Sliding Mode Observer,” Journal of Mechanical Science and Technology, Vol. 23, No. 8, pp. 1991–1999, 2009.
Sobhani, M. H. and Poshtan, J., “Fault Detection and Isolation using Unknown Input Observers with Structured Residual Generation,” International Journal of Instrumentation and Control Systems, Vol. 2, No. 2, pp. 1–12, 2012.
Sepasi, M. and Sassani, F., “On-Line Fault Diagnosis of Hydraulic Systems using Unscented Kalman Filter,” International Journal of Control, Automation and Systems, Vol. 8, No. 1, pp. 149–156, 2010.
Rezazadeh, A. S., Koofigar, H. R., and Hosseinnia, S., “Robust Leakage Detection for Electro Hydraulic Actuators using an Adaptive Nonlinear Observer,” Int. J. Precis. Eng. Manuf., Vol. 15, No. 3, pp. 391–397, 2014.
Dassanake, S., Balas, G., and Bokor, J., “Using Unknown Input Observers to Detect and Isolate Sensor Faults in a Turbofan Engine,” Proc. of the 19th Digital Avionics Systems Conference, Vol. 2, pp. 6E5/1–6E5/7, 2000.
Halder, P., “A Novel Approach for Detection and Diagnosis of Process and Sensor Faults in Electro-Hydraulic Actuator,” Vol. 6, No. 7, pp. 15–22, 2013.
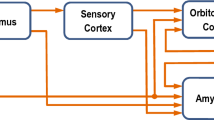
Balkenius, C. and MorEn, J., “Emotional Learning: A Computational Model of the Amygdala,” Journal of Cybernetics and Systems, Vol. 32, No. 6, pp. 611–636, 2001.
Shenouda, A., “Quasi-Static Hydraulic Control Systems and Energy Savings Potential Using Independent Metering Four-Valve Assembly Configuration,” Ph.D. Thesis, Department of Mechanical Engineering, Georgia Institute of Technology, 2006.
Jelali, M. and Kroll, A., “Hydraulic Servo-Systems: Modelling, Identification and Control,” Springer Science & Business Media, pp. 35–71, 2012.
Oh, J.-Y., Jung, G.-H., Lee, G.-H., Park, Y.-J., and Song, C.-S., “Modeling and Characteristics Analysis of Single-Rod Hydraulic System using Electro-Hydrostatic Actuator,” Int. J. Precis. Eng. Manuf., Vol. 13, No. 8, pp. 1445–1451, 2012.
Mason, J. C. and Handscomb, D. C., “Chebyshev Polynomials,” CRC Press, pp. 145–150, 2002.
Patton, R. J. and Chen, J., “Robust Model-based Fault Diagnosis for Dynamic Systems,” Kluwer Academic Publishers, pp. 19–33, 1999.
Chen, J. and Patton, R. J., “Robust Fault Diagnosis of Stochastic Systems with Unknown Disturbances,” Proc. of International Conference on Control, Vol. 2, pp. 1340–1345, 1994.
Zarei, J. and Poshtan, J., “Design of Nonlinear Unknown Input Observer for Process Fault Detection,” Industrial & Engineering Chemistry Research, Vol. 49, No. 22, pp. 11443–11452, 2010.
Witczak, M. and Pretki, P., “Design of an Extended Unknown Input Observer with Stochastic Robustness Techniques and Evolutionary Algorithms,” International Journal of Control, Vol. 80, No. 5, pp. 749–762, 2007.
Chen, R. H., Ng, H. K., Speyer, J. L., Guntur, L. S., and Carpenter, R., “Health Monitoring of a Satellite System,” Journal of Guidance, Control, and Dynamics, Vol. 29, No. 3, pp. 593–605, 2006.
Talhaoui, H., Menacer, A., Kessal, A., and Kechida, R., “Fast Fourier and Discrete Wavelet Transforms Applied to Sensorless Vector Control Induction Motor for Rotor Bar Faults Diagnosis,” ISA Transactions, Vol. 53, No. 5, pp. 1639–1649, 2014.
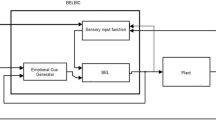
Nahian, S. A., Truong, D. Q., and Ahn, K. K., “A Self-Tuning Brain Emotional Learning-based Intelligent Controller for Trajectory Tracking of Electrohydraulic Actuator,” Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, Vol. 228, No. 7, pp. 461–475, 2014.
Sadeghieh, A., Sazgar, H., Goodarzi, K., and Lucas, C., “Identification and Real-Time Position Control of a Servo-Hydraulic Rotary Actuator by Means of a Neurobiologically Motivated Algorithm,” ISA Transactions, Vol. 51, No. 1, pp. 208–219, 2012.
Ahn, K. K., Chau, N. H. T., and Truong, D. Q., “Robust Force Control of a Hybrid Actuator using Quantitative Feedback Theory,” Journal of Mechanical Science and Technology, Vol. 21, No. 12, pp. 2048–2058, 2007.
Anh, H. P. H. and Ahn, K. K., “Hybrid Control of a Pneumatic Artificial Muscle (PAM) Robot Arm using an Inverse Narx Fuzzy Model,” Engineering Applications of Artificial Intelligence, Vol. 24, No. 4, pp. 697–716, 2011.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Nahian, S.A., Truong, D.Q., Chowdhury, P. et al. Modeling and fault tolerant control of an electro-hydraulic actuator. Int. J. Precis. Eng. Manuf. 17, 1285–1297 (2016). https://doi.org/10.1007/s12541-016-0153-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-016-0153-2