
Abstract
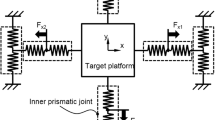
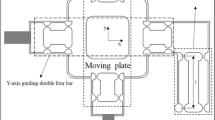
A compliant parallel mechanism for two translations is proposed and applied to a XY fine motion stage driven by piezo actuators. Four flexure-based prismatic-prismatic joint chains are arranged in four sides of a target platform to implement the compliant parallel mechanism. Among others, two are passive joint chains for only motion guidance, and the others are active joint chains for motion guidance merging the function of the displacement amplification of a piezo actuator. Due to the active joint chains, the proposed mechanism has more compact structure than the others which have the separated mechanisms of the motion guidance and the displacement amplification. In addition, the compliant mechanism has a monolithic structure not to be assembled. The compliant mechanism is designed, verified to satisfy some design constraints using Finite element Analysis, and then combined with piezo actuators and capacitance sensors. The characteristics and the performance of the piezo-driven compliant parallel mechanism are demonstrated by experiments.
Similar content being viewed by others

References
Smith, S. T., “Flexures: Elements of Elastic Mechanisms,” CRC Press, 2000.
Lee, S.-H., Kim, H.-C., and Jung, K.-S., “Atomic force microscopy using optical pickup head to measure cantilever displacement,” Int. J. Precis. Eng. Manuf., Vol. 12, No. 5, pp. 913–915, 2011.
Niezrecki, C., Brei, D., Balakrishnan, S., and Moskalik, A., “Piezoelectric actuation: state of the art,” The Shock and Vibration Digest, Vol. 33, pp. 269–280, 2001.
Ma, H.-W., Yao, S.-M., Wang, L-Q., and Zhong, Z., “Analysis of the displacement amplification ratio of bridge-type flexure hinge,” Sensors and Actuators A, Vol. 132, No. 2, pp. 730–736, 2006.
Kim, J. H., Kim, S. H., and Kwak, Y. K., “Development and optimization of 3-D bridge-type hinge mechanisms,” Sensors and Actuators A, Vol. 116, No. 3, pp. 530–538, 2004.
Sugawara, Y., Onitsuka, K., Yoshikawa, S., Xu, Q., Newnham, R. E., and Uchino, K., “Metal-Ceramic Composite Actuators,” J. Amer. Ceram. Soc., Vol. 75, No. 4, pp. 996–998, 1992.
Meyer Jr., R. J., Dogan, A., Yoon, C., Pilgrim, S. M., and Newnham, R. E., “Displacement amplification of electroactive materials using the cymbal flextensional transducer,” Sensor and Actuators A, Vol. 87, No. 3, pp. 157–162, 2001.
Leinvuo, J. T., Wilson, S. A., Whatmore, R. W., and Cain, M. G., “A new flextensional piezoelectric ultrasonic motor-Design, fabrication and characterisation,” Sensors and Actuators A, Vol. 133, No. 1, pp. 141–151, 2007.
Chang, S. H., Tseng, C. K., and Chien, H. C., “An Ultraprecision XYθz piezo-micropositioner, Part I: Design and analysis,” IEEE trans. on Ultrasonics, Ferroelectrics, and Frequency Control, Vol. 46, No. 4, pp. 897–905, 1999.
Choi, K.-B. and Kim, D.-H., “Monolithic parallel linear compliant mechanism for two axes ultraprecision linear motion,” Review of Scientific Instruments, Vol. 77, No. 6, pp. 065106–065106-7, 2006.
Li, Y. and Xu, Q., “Design and analysis of a totally decoupled flexure-based XY parallel micromanipulator,” IEEE Trans. on Robotics, Vol. 25, No. 3, pp. 645–657, 2009.
Zareinejad, M., Ghidary, S., Rezaei, S., and Abdullah, A., “Precision control of a piezo-actuated micro telemanipulation system,” Int. J. Precis. Eng. Manuf., Vol. 11, No. 1, pp. 55–65, 2010.
Kaizuka, H. and Siu, B., “A simple way to reduce hysteresis and creep when using piezoelectric actuators,” Japaness J. of Applied Physics, Vol. 27, No. 5, pp. L773–L776, 1988.
Ge, P. and Jouaneh, M., “Generalized preisach model for hysteresis nonlinearity of piezoceramic actuators,” Precision Engineering, Vol. 20, No. 2, pp. 99–111, 1997.
Fleming, A. J. and Moheimani, S. O. R., “A grounded-load charge amplifier for reducing hysteresis in piezoelectric tube scanners,” Rev. of Sci. Instr., Vol. 76, No. 7, pp. 073707–073707-5, 2005.
Yi, K. A. and Veillette, R. J., “A charge controller for linear operation of a piezoelectric stack actuator,” IEEE Trans. on Control Systems Technology, Vol. 13, No. 4, pp. 517–526, 2005.
Clayton, G. M., Tien, S., Fleming, A. J., Moheimani, S. O. R., and Devasia, S., “Inverse-feedforward of charge-controlled piezopositioners,” Mechatronics, Vol. 18, No. 5–6, pp. 273–281, 2008.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Choi, KB., Lee, J.J., Kim, G.H. et al. A compliant parallel mechanism with flexure-based joint chains for two translations. Int. J. Precis. Eng. Manuf. 13, 1625–1632 (2012). https://doi.org/10.1007/s12541-012-0213-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-012-0213-1