
Abstract
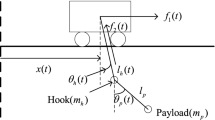
Overhead cranes are under-actuated mechanical systems with three degrees-of-freedom (trolley displacement, cable length, and cargo swing angle) and only two actuators: one for cargo hoisting and another for trolley driving. An overhead crane transfers the trolley to a desired position, hoists the cargo up and down until the desired cable length is achieved while keeping the cargo swing angle small during the transfer process. The rope should no longer have a swing angle at the load destination. In this research, a nonlinear controller is proposed for an overhead crane system, in which partial feedback linearization technique is used. To show the effectiveness of the proposed controller, we perform both simulation and experimental study. The simulation and experimental results show that the crane system with the proposed controller is asymptotically stable. Furthermore, all state trajectories of the system reach a steady state within a considerably short time even if the inherent structure of the system is changed.
Similar content being viewed by others


Abbreviations
- m c :
-
cargo mass (kg)
- m t :
-
trolley mass (kg)
- m l :
-
equivalent mass of all rotating components of hoist (kg)
- x(t):
-
trolley displacement (m)
- l(t):
-
cargo suspended cable length (m)
- θ(t):
-
cargo swing angle (rad)
- u t :
-
trolley travelling force (N)
- u l :
-
cargo lifting force (N)
References
Han, D. S. and Han, G. J., “Force coefficient at each support point of a container crane according to the wind direction,” Int. J. Precis. Eng. Manuf., Vol. 12, No. 6, pp. 1059–1064, 2011.
Park, H., Chwa, D. and Hong, K. S., “A feedback linearization control of Container cranes: Varying rope length,” International Journal of Control, Automation, and Systems, Vol. 5, No. 4, pp. 379–387, 2007.
Lee, H. H., “A new approach for the anti-swing control of overhead cranes with high-speed load hoisting,” International Journal of Control, Vol. 76, No. 15, pp. 1493–1499, 2003.
Cho, H. C., Lee, J. W., Lee, Y. J. and Lee, K. S., “Lyapunov theory based robust control of complicated nonlinear mechanical systems with uncertainty,” Journal of Mechanical Science and Technology, Vol. 22, No. 11, pp. 2142–2150, 2008.
Kim, C. S. and Hong, K. S., “Boundary control of container cranes from perspective of controlling an axially moving string system,” International Journal of Control, Automation, and Systems, Vol. 7, No. 3, pp. 437–445, 2009.
Ngo, Q. H. and Hong, K. S., “Sliding-mode antisway control of an offshore container crane,” IEEE/ASME Transactions on Mechatronics, Vol. 17, No. 2, pp. 201–209, 2012.
Ngo, Q. H., Hong, K. S. and Jung, I. H., “Adaptive control of an axially moving system,” Journal of Mechanical Science and Technology, Vol. 23, No. 11, pp. 3071–3078, 2009.
Kim, Y. S., Hong, K. S. and Sul, S. K., “Anti-sway control of container cranes: inclinometer, observer, and state feedback,” International Journal of Control, Automation, and Systems, Vol. 2, No. 4, pp. 435–449, 2004.
Moustafa, K. A. F., “Reference trajectory tracking of overhead cranes,” Journal of Dynamic Systems, Measurement, and Control, Vol. 123, No. 1, pp. 139–141, 2001.
Fang, Y., Dixon, W. E., Dawson, D. M. and Zergeroglu, E., “Nonlinear coupling control laws for an under-actuated overhead crane system,” IEEE/ASME Transactions on Mechatronics, Vol. 8, No. 3, pp. 418–423, 2003.
Sun, N., Fang, Y., Zhang, Y. and Ma, B., “A novel kinematic coupling-based trajectory planning method for overhead cranes,” IEEE/ASME Transactions on Mechatronics, Vol. 17, No. 1, pp. 166–173, 2012.
Cho, S. K. and Lee, H. H., “A fuzzy-logic anti-swing controller for three dimensional overhead cranes,” ISA Transactions, Vol. 41, No. 2, pp. 235–243, 2002.
Toxqui, R., Yu, W. and Li, X., “Anti-swing control for overhead crane with neural compensation,” Proceeding of International Joint Conference on Neural Networks, pp. 4697–4703, 2006.
Singhose, W., Perter, L., Kenison, M. and Krrikku, E., “Effects of hoisting on the input shaping control of gantry cranes,” Control Engineering Practice, Vol. 8, No. 10, pp. 1159–1165, 2000.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Le, T.A., Kim, GH., Kim, M.Y. et al. Partial feedback linearization control of overhead cranes with varying cable lengths. Int. J. Precis. Eng. Manuf. 13, 501–507 (2012). https://doi.org/10.1007/s12541-012-0065-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-012-0065-8