
Abstract
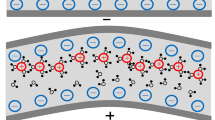
Predicting of electro-mechanical behavior of ionic polymer metal composites (IPMCs) is important in many actuator design applications, but a general model for such predictions has not been successfully developed yet. A simple but versatile modeling method based on the concentrated ion boundary layer model was developed to advance the modeling of the bending behavior of IPMCs of different sizes. IPMC beams with different thicknesses and sizes were fabricated by stacking and hot-pressing method, and their mechanical bending characteristics were measured. Finite element analysis of the beams was performed using a concentrated ion boundary layer model that uses a thermal analogy. The calculated deformation and tip blocking force agreed well with the measured values for specimens of different sizes. This study shows that the proposed modeling method is simple but general enough to simulate the deformation characteristics of IPMC actuators of various sizes.
Similar content being viewed by others

References
Shahinpoor, M., “Micro-electro-mechanics of ionic polymeric gels as electrically controllable artificial muscles,” J. Intell. Mater. Syst. Struct., Vol. 6, No. 3, pp. 307–314, 1995.
Asaka, K. and Oguro, K., “Bending of polyelectrolyte membrane platinum composites by electric stimuli, Part II Response kinetics,” J. of Electroanalytic Chemistry, Vol. 480, No. 1–2, pp. 186–198, 2000.
Tadokoro, S., Yamagami, S., Takamori, T. and Oguro, K., “An actuator model of ICPF (Ionic Conducting Polymer Film) for robotic applications on the basis of physicochemical hypotheses,” Proc. of IEEE International Conference on Robotics and Automation, pp. 1340–1346, 2000.
Nemat-Nasser, S., “Micromechanics of actuation of ionic polymer-metal composites,” J. Appl. Phys., Vol. 92, No. 5, pp. 2899–2915, 2002.
Metz, P., Alici, G. and Spinks, G. M., “A finite element model for bending behavior of conducting polymer electromechanical actuators,” Sensors and Actuators A, Vol. 131, pp. 1–11, 2006.
Lee, S., Park, H. C. and Kim, K. J., “Equivalent modeling for ionic polymer-metal composite actuators based on beam theory,” Smart Materials and Structures, Vol. 14, No. 6, pp. 1363–1368, 2005.
Lughmani, W. A., Jho, J. Y., Lee, J. Y. and Rhee, K., “Modeling of Bending Behavior of IPMC Beams Using Concentrated Ion Boundary Layer,” Int. J. Prec. Eng. Manuf., Vol. 10, No. 5, pp. 131–139, 2009.
Lee, S. J., Han, M. J., Kim, S. J., Jho, J. Y., Lee, H. Y. and Kim, Y. H., “A New Fabrication Method for IPMC Actuator and Application to Artificial Finger,” Smart Mater. Struct., Vol. 15, No. 5, pp. 1217–1224, 2006.
Han, M. J., Park, J. H., Lee, J. Y. and Jho, J. Y., “Ionic Polymer-Metal Composite Actuators Employing Radiation-Grafted Fluoropolymers as Ion-Exchange Membranes,” Macromol. Rapid Communication, Vol. 27, No. 3, pp. 219–222, 2006.
Paquette, J. W., Kim, K. J. and Kim, D., “Low temperature characteristics of ionic polymer-metal composite actuators,” Sensors and Actuators A, Vol. 118, pp. 135–143, 2005.
Kim, S. J., Lee, I. T. and Kim, Y. H., “Performance Enhancement of IPMC Actuator by Plasma Surface Treatment,” Smart Mater. Struct., Vol. 16, No. 1, pp. 6–11, 2007.
Toi, Y. and Kang, S.-S., “Finite element analysis of twodimensional electrochemical-mechanical response of ionic conduction polymer-metal composite beams,” Computers and Structures, Vol. 83, No. 31–32, pp. 2573–2583, 2005.
Johnson, T. and Amirouche, F., “Multiphysics modeling of an IPMC microfluidic control device,” Microsys. Technol., Vol. 14, No. 6, pp. 871–879, 2008.
Yoon, W. J., Reinhall, P. G. and Seibel, E. J., “Analysis of electro-active polymer bending: A component in a low cost ultrathin scanning endoscope,” Sensors and Actuators A, Vol. 133, No. 2, pp. 506–517, 2007.
Porfiri, M., “Charge dynamics in ionic polymer metal composites,” J. Applied Physics, Vol. 104, No. 10, Paper No. 104915, 2008.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lee, J.H., Oh, J.S., Jeong, G.H. et al. New computational model for predicting the mechanical behavior of ionic polymer metal composite (IPMC) actuators. Int. J. Precis. Eng. Manuf. 12, 737–740 (2011). https://doi.org/10.1007/s12541-011-0096-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-011-0096-6