
Abstract
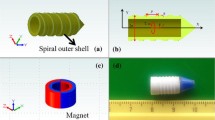
Currently, many researchers from various fields are engaged in developing machines that move in a tubular cylinder. Many such machines are being developed for industrial purposes, such as for the examination of ruptures at the joints of gas and water pipes and those caused by cracks. Studies specifically focused on applications to the medical field, such as the realization of machines that can travel through the intestines and blood vessels, have also been reported. In this study, we propose a microscopic moving mechanism that can move in 2–3 mm-diameter blood vessels by peristalsis motion with repeated expansion and contraction using hydraulic pressure, particularly using a physiological saline solution as an acting fluid. Peristalsis motion, observed in earthworms and nematodes, induces shape variation and a shift in the center of gravity, causing extensional waves to propagate and thus achieving movement without damage to the vulnerable inner walls of blood vessels. When this moving mechanism is combined with catheters, we can realize an active catheter that can reach a diseased site by itself. In this study, we created a microrobot with pistonlike hydraulic pressure sources outside both its ends. The microrobot can move back and forth as follows. When the piston pumps, the acting fluid is repeatedly injected into and ejected from the driving body, while the microrobot changes the length and width of its rubber body. The development of our microrobot and the results of its evaluation are reported in this paper.
Similar content being viewed by others

Author information
Authors and Affiliations
Corresponding author
Additional information
Yuichi Nakazato Dr. Nakazato is currently an Associate Professor at the Department of Mechanical Engineering at Nippon Institute of Technology in Saitama, Japan. Dr. Nakazato’s research interests include medical and welfare robots and humanoid robots.
Rights and permissions
About this article
Cite this article
Nakazato, Y., Sonobe, Y. & Toyama, S. Development of an In-pipe micro mobile robot using peristalsis motion. J Mech Sci Technol 24, 51–54 (2010). https://doi.org/10.1007/s12206-009-1174-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-009-1174-x