
Abstract
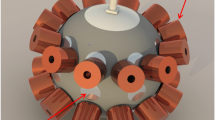
This paper presents a spherical motor driven by electro-magnets that can rotate omnidirectionally with some degrees of rotation angle error independent of rotation direction. The spherical motor is composed of a spherical rotor, a semi-spherical stator, a control PC, a control circuit, and a DC power supply. The rotor has 92 neodymium magnets. On the other hand, 84 electro-magnets are arranged on the stator. Each electro-magnet can be excited to north or south magnetic pole. The control PC calculates the posture of the rotor after a small time interval and generates the pattern of excitation of electro-magnets in order to rotate the rotor to its calculated posture. The results of the performance of the developed spherical motor show that the maximum torque is 0.24 (N·m), the maximum rotation speed is 2.5 (rad/s), and the average error of rotation angle is several degrees.
Similar content being viewed by others


References
H. Kanazawa, T. Tsukimoto, T. Maeno and A. Miyake, Tribology of ultrasonic motor, Journal of Japanese Society of Tribologists (in Japanese), 38(3) (1993) 207–212.
T. Yano and T. Suzuki, Basic characteristics of the small spherical stepping motor, Proc. of 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’02), (2002) 1980–1985.
A. Tanaka, M. Watada, S. Torii and D. Ebihara, Proposal and design of multi-degree of freedom actuator, Proc. of 11th MAGDA Conference (in Japanese), (2002) 169–172.
G. S. Chirikjian and D. Stein, Kinematic design and commutation of a spherical stepper motor, IEEE/ASME Transactions on Mechatronics, 4(4) (1999) 342–353.
A. Gofuku, T. Nagai, S. Ikeshita, M. Shibata and T. Kamegawa, Development of a spherical motor to rotate in all directions, Trans. Japan Society of Mechanical Engineers (in Japanese), 74(747-C) (2009) 2713–2720.
Author information
Authors and Affiliations
Corresponding author
Additional information
Seiji Ikeshita received his B.S. in Systems Engineering from Okayama University, Japan, in 2008. He is currently a Master’s student at the Graduate School of Natural Science and Technology at Okayama University.
Akio Gofuku received his B.S. and M.S. in Electrical Engineering from Kyoto University, Japan, in 1981 and 1983 and his PhD from Kyoto University in 1990. He is currently a professor at the Graduate School of Natural Science and Technology at Okayama University. His research interests include human-machine interfaces, mechatronics, and medical support systems.
Tetsushi Kamegawa received his B.S. and M.S. in Mechano-Aerospace Engineering from Tokyo Institute of Technology, Japan, in 1999 and 2001 and his PhD from Tokyo Institute of Technology in 2004. He is currently a lecturer at the Graduate School of Natural Science and Technology at Okayama University, Japan. His research interests include snake-like robots and rescue robot systems.
Takakazu Nagai received his B.S. in Systems Engineering from Okayama University in 2006. He received his M.S. in Mechanical Systems Engineering from Okayama University in 2008. He is currently an engineer at Glory LTD, Hyogo, Japan.
Rights and permissions
About this article
Cite this article
Ikeshita, S., Gofuku, A., Kamegawa, T. et al. Development of a spherical motor driven by electro-magnets. J Mech Sci Technol 24, 43–46 (2010). https://doi.org/10.1007/s12206-009-1163-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-009-1163-0