
Abstract
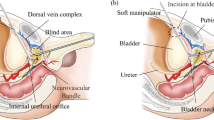
Robot-assisted laparoscopic radical prostatectomy (RARP) is widely used to treat prostate cancer. The rigid instruments primarily used in RARP cannot overcome the problem of blind areas in surgery and lead to more trauma such as more incision for the passage of the instrument and additional tissue damage caused by rigid instruments. Soft robots are relatively flexible and theoretically have infinite degrees of freedom which can overcome the problem of the rigid instrument. A soft robot system for single-port transvesical robot-assisted radical prostatectomy (STvRARP) is developed in this paper. The soft manipulator with 10 mm in diameter and a maximum bending angle of 270° has good flexibility and dexterity. The design and mechanical structure of the soft robot are described. The kinematics of the soft manipulator is established and the inverse kinematics is compensated based on the characteristics of the designed soft manipulator. The master-slave control system of soft robot for surgery is built and the feasibility of the designed soft robot is verified.
Similar content being viewed by others


References
PANG C, XIE X N, YANG Z J, et al. Effect of laparoscopic radical prostatectomy for early localized prostate cancer [J]. Chinese Journal of Modern Drug Application Drug, 2020, 14(12): 1–3 (in Chinese).
BRAY F, FERLAY J, SOERJOMATARAM I, et al. Global cancer statistics 2018: GLOBOCAN estimates of incidence and mortality worldwide for 36 cancers in 185 countries [J]. CA: A Cancer Journal for Clinicians, 2018, 68(6): 394–424.
CAI L, GAO X, LI H Z, et al. Consensus on the safety of laparoscopic (robot-assisted) radical resection of prostate cancer [J]. Journal of Modern Urology, 2020, 25(7): 575–584 (in Chinese).
TONUTTI M, ELSON D S, YANG G Z, et al. The role of technology in minimally invasive surgery: State of the art, recent developments and future directions [J]. Postgraduate Medical Journal, 2017, 93(1097): 159–167.
RUAN S W. Research on new soft material robot technology [J]. Science and Technology Vision, 2019 (22): 40–41 (in Chinese).
SUN Y L, ZHANG Q J, CHEN X Y. Overview of soft-bodied actuators [J]. Journal of Machine Design, 2019, 36(2): 5–18 (in Chinese).
LI X, FAN G S X, CHEN S, et al. The development status and its applications of soft manipulators [J]. Manufacturing Automation, 2019, 41(5): 85–92 (in Chinese).
CALISTI M, GIORELLI M, LEVY G, et al. An octopus-bioinspired solution to movement and manipulation for soft robots [J]. Bioinspiration & Biomimetics, 2011, 6(3): 036002.
CIANCHETTI M, ARIENTI A, FOLLADOR M, et al. Design concept and validation of a robotic arm inspired by the octopus [J]. Materials Science and Engineering: C, 2011, 31(6): 1230–1239.
LASCHI C, CIANCHETTI M, MAZZOLAI B, et al. Soft robot arm inspired by the octopus [J]. Advanced Robotics, 2012, 26(7): 709–727.
HENDRICK R J, HERRELL S D, WEBSTER R J. A multi-arm hand-held robotic system for transurethral laser Prostate surgery [C]//2014 IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 2850–2855.
SARLI N, GIUDICE G D, DE S, et al. TURBot: A system for robot-assisted transurethral bladder tumor resection [J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(4): 1452–1463.
AREZZO A, MINTZ Y, ALLAIX M E, et al. Total mesorectal excision using a soft and flexible robotic arm: A feasibility study in cadaver models [J]. Surgical Endoscopy, 2017, 31(1): 264–273.
BRANCADORO M, MANTI M, GRANI F, et al. Toward a variable stiffness surgical manipulator based on fiber jamming transition [J]. Frontiers in Robotics and AI, 2019, 6: 12.
DENG T. Development of a soft robotic system for minimally invasive cardiac surgery [D]. Shanghai: Shanghai Jiao Tong University, 2014 (in Chinese).
WANG H S, ZHANG R X, CHEN W D, et al. A cable-driven soft robot surgical system for cardiothoracic endoscopic surgery: Preclinical tests in animals [J]. Surgical Endoscopy, 2017, 31(8): 3152–3158.
IGARASHI T, ISHII T, AOE T, et al. Small-incision laparoscopy-assisted surgery under abdominal cavity irrigation in a porcine model [J]. Journal of Laparoendoscopic & Advanced Surgical Techniques, 2016, 26(2): 122–128.
ZHOU X C, ZHANG C, FU B, et al. Single-port transvesical robot assisted radical prostatectomy: a novel approach to preserve postoperative urinary continence [J]. Chinese Journal of Robotic Surgery, 2020, 1(1): 11–17 (in Chinese).
STECK D, QU J, KORDMAHALE S B, et al. Mechanical responses of Ecoflex silicone rubber: Compressible and incompressible behaviors [J]. Journal of Applied Polymer Science, 2019, 136(5): 47025.
NAGUA L, MONJE C A, MUÑOZ J, et al. Design and performance validation of a cable-driven soft robotic neck [C]//Jornadas Nacionales de Robótica. Valladolid: Jornadas Nacionales de Robótica, 2018: 1–7.
WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: A review [J]. The International Journal of Robotics Research, 2010, 29(13): 1661–1683.
JONES B A, WALKER I D. Kinematics for multi-section continuum robots [J]. IEEE Transactions on Robotics, 2006, 22(1): 43–55.
NEPPALLI S, CSENCSITS M A, JONES B A, et al. Closed-form inverse kinematics for continuum manipulators [J]. Advanced Robotics, 2009, 23(15): 2077–2091.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: the National Natural Science Foundation of China (Nos. 62133009, 61973211, 51911540479 and M-0221), the Project of the Science and Technology Commission of Shanghai Municipality (No. 21550714200), the Research Project of Institute of Medical Robotics of Shanghai Jiao Tong University, the Foreign Cooperation Project of Fujian Science and Technology Plan (No. 2022I0041), and the Quanzhou High-Level Talent Innovation and Entrepreneurship Project (No. 2021C003R)
Rights and permissions
About this article

Cite this article
Li, R., Chen, F., Yu, W. et al. A Novel Cable-Driven Soft Robot for Surgery. J. Shanghai Jiaotong Univ. (Sci.) 29, 60–72 (2024). https://doi.org/10.1007/s12204-022-2497-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12204-022-2497-3