
Abstract
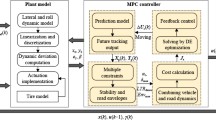
In real-world scenarios, the uncertainty of measurements cannot be handled efficiently by traditional model predictive control (MPC). A stochastic MPC (SMPC) method for handling the uncertainty of states in autonomous driving lane-keeping scenarios is presented in this paper. A probabilistic system is constructed by considering the variance of states. The probabilistic problem is then transformed into a solvable deterministic optimization problem in two steps. First, the cost function is separated into mean and variance components. The mean component is calculated online, whereas the variance component can be calculated offline. Second, Cantelli’s inequality is adopted for the deterministic reformulation of constraints. Consequently, the original probabilistic problem is transformed into a quadratic programming problem. To validate the feasibility and effectiveness of the proposed control method, we compared the SMPC controller with a traditional MPC controller in a lane-keeping scenario. The results demonstrate that the SMPC controller is more effective overall and produces smaller steady-state distance errors.
Similar content being viewed by others

References
KHODAYARI A, GHAFFARI A, AMELI S, et al. A historical review on lateral and longitudinal control of autonomous vehicle motions [C]//2010 International Conference on Mechanical and Electrical Technology. Singapore: IEEE, 2010: 421–429.
TURRI V, CARVALHO A, TSENG H E, et al. Linear model predictive control for lane keeping and obstacle avoidance on low curvature roads [C]//16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). The Hague: IEEE, 2013: 378–383.
XU Y, CHEN B Y, SHAN X, et al. Model predictive control for lane keeping system in autonomous vehicle [C]//2017 7th International Conference on Power Electronics Systems and Applications-Smart Mobility, Power Transfer & Security (PESA). Hong Kong: IEEE, 2017: 1–5.
FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems [J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566–580.
FARINA M, GIULIONI L, MAGNI L, et al. A probabilistic approach to Model Predictive Control [C]//52nd IEEE Conference on Decision and Control. Firenze: IEEE, 2013: 7734–7739.
LIU C C, CARVALHO A, SCHILDBACH G, et al. Stochastic predictive control for lane keeping assistance systems using a linear time-varying model [C]//2015 American Control Conference (ACC). Chicago, IL: IEEE, 2015: 3355–3360.
SUH J, CHAE H, YI K. Stochastic model-predictive control for lane change decision of automated driving vehicles [J]. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4771–4782.
SUH J, KIM B, YI K. Stochastic predictive control based motion planning for lane change decision using a Vehicle Traffic Simulator [C]//2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific). Busan: IEEE, 2016: 900–907.
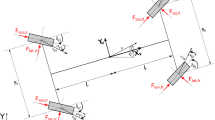
RAJAMANI R. Mechanical engineering series: Vehicle dynamics and control [M]. Heidelberg: Springer, 2005.
GULDNER J, TAN H S, PATWARDHAN S. Analysis of automatic steering control for highway vehicles with look-down lateral reference systems [J]. Vehicle System Dynamics, 1996, 26(4): 243–269.
LUO L H. Steering control for lane keeping system based on MPC [J]. Journal of Shanghai Jiao Tong University, 2014, 48(7): 1015–1020 (in Chinese).
FARINA M, GIULIONI L, MAGNI L, et al. An approach to output-feedback MPC of stochastic linear discrete-time systems [J]. Automatica, 2015, 55: 140–149.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item
the Science and Technology Commission of Shanghai Municipality (No. 19511103503)
Rights and permissions
About this article

Cite this article
Zhang, C., Zhuang, C., Zheng, X. et al. Stochastic Model Predictive Control Approach to Autonomous Vehicle Lane Keeping. J. Shanghai Jiaotong Univ. (Sci.) 26, 626–633 (2021). https://doi.org/10.1007/s12204-021-2352-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12204-021-2352-y