
Abstract
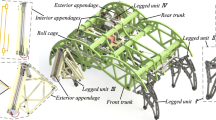
A new explosion-proof walking system was designed for the coal mine rescue robot (CMRR) by optimizing the mechanical structure and control algorithm. The mechanical structure innovation lies mainly in the dual-motor drive tracked unit used, which showed high dynamic performance compared with the conventional tracked unit. The control algorithm, developed based on decision trees and neural networking, facilitates autonomous switching between “Velocity-driven Mode” and “Torquedriven Mode”. To verify the feasibility and effectiveness of the control strategy, we built a self-designed test platform and used it to debug the control program; we then made a robot prototype and conducted further experiments on single-step, ramp, and rubble terrains. The results show that the proposed walking system has excellent dynamic performance and the control strategy is very efficient, suggesting that a robot with this type of explosion-proof walking system can be successfully applied in Chinese coal mines.
Similar content being viewed by others

References
LI Yun-wang, GE Shi-rong, ZHU Hua, FANG Hai-feng, GAO Jin-ke. Mobile platform of rocker-type coal mine rescue robot [J]. Mining Science and Technology, 2010, 20(3): 466–471. (in Chinese)
MORRIS A, FERGUSON D, OMOHUNDRO Z, BRADLEY D, SILVER D, BAKER C, THAYER S, WHITTAKER C, HITTAKER W. Recent developments in subterranean robotics [J]. Journal of Field Robots, 2006, 23(1): 35–57.
MURPHY R R, KRAVITZ J, STOVER S L, SHOURESHI R. Mobile robots in mine rescue and recovery [J]. IEEE Robotics & Automation Magazine, 2009, 16(2): 91–103.
MORRIS A, FERGUSON D, THAYER S. A campaign in autonomous mine mapping [C]// IEEE International Conference on Robotics & Automation Piscataway, NJ: IEEE, 2004, 2(2): 2004–2009.
WANG W, DONG W, SU Y, WU D, DU Z. Development of search-and-rescue robots for underground coal mine applications [J]. Journal of Field Robotics, 2014, 31(3): 386–407.
LI Yun-wang, GE Shi-rong, ZHU Hua, LIU Jiang. Obstaclesurmounting mechanism and capability of four-track robot with two swing arms [J]. Robot, 2010(32): 157–165. (in Chinese)
KROTKOV E P, SIMMONS R G, WHITTAKER W L. Ambler: Performance of a six-legged planetary rover [J]. Acta Astronaut, 1992, 35(1): 75–81.
SANTOS P G, GÁLVEZ J, ESTREMERA J, GARCÍA E. SIL04: A true walking robot for the comparative study of walking machine techniques [J]. IEEE Robotics & Automation Magazine, 2003, 10(4): 23–32.
DING Liang-hong, WANG Run-xiao, FENG Hua-shan, LI Jun. Brief analysis of a BigDog quadruped robot [J]. China Mechanical Engineering, 2012, 23(5): 505–514. (in Chinese)
MA J, CHENG J, DAMIN Z. Analysis of sojourner’s six-wheeled rocker suspension appended with driving moment [C]// International Conference on Information Engineering & Computer Science. Piscatway, NJ: IEEE, 2009: 1–4.
BOISSIER L. IARES-L: A ground demonstrator of planetary rover technologies [J]. Robotics & Autonomous Systems, 1998, 23(1/2): 89–97.
ZHANG Hong-hua, LIANG Jun, HUANG Xiang-yu, YUAN Li. Autonomous hazard avoidance control for Chang’E-3 soft landing [J]. Scientia Sinica Technologica, 2014(44): 559–568. (in Chinese)
FAN Lu-qiao, YAO Xi-tan, QI Heng-nian, YANG Wu, JIANG Liang-zhong. Research progress and key techniques of explosive ordnance disposal robot [J]. Machine Tool & Hydraulics, 2008, 36(6): 139–143.
MATTHIES L, XIONG Y, HOGG R, ZHU D, RANLIN A, KENNEDY B, HEBERT M, MACLACHLAN R, WON C, FROST T, SUKHATME G, MCHENRY LM, GOLDBERG S. A portable, autonomous, urban reconnaissance robot [J]. Robotics & Autonomous Systems, 2002, 40(2): 163–172.
YOU Bo, LIU Su-ju, XU Jun, LI Dong-jie. Design of multifunction anti-terrorism robotic system based on police dog [C]// International Symposium on Multispectral Image Processing & Pattern Recognition. Bellingham: SPIE, 2007: 6790.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Project(2012AA041504) supported by the National High-Tech Research and Development Program of China; Project(KYLX15_1418) supported by the 2015 Annual General University Graduate Research and Innovation Program of Jiangsu Province, China; Project supported by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD), China
Rights and permissions
About this article

Cite this article
Li, Yt., Zhu, H., Li, Mg. et al. A novel explosion-proof walking system: Twin dual-motor drive tracked units for coal mine rescue robots. J. Cent. South Univ. 23, 2570–2577 (2016). https://doi.org/10.1007/s11771-016-3318-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-016-3318-3