
Abstract
Purpose
Robotic endovascular technology may offer advantages over conventional manual catheter techniques. Our aim was to compare the endovascular catheter path-length (PL) for robotic versus manual contralateral gate cannulation during endovascular aneurysm repair (EVAR), using video motion analysis (VMA).
Methods
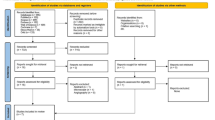
This was a multicentre retrospective cohort study with fluoroscopic video recordings of 24 EVAR cases (14 robotic, 10 manual) performed by experienced operators (> 50 procedures), obtained from four leading European centres. Groups were comparable with no statistically significant differences in aneurysm size (p = 0.47) or vessel tortuosity (p = 0.68). Two trained assessors used VMA to calculate the catheter PL during contralateral gate cannulation for robotic versus manual approaches.
Results
There was a high degree of inter-observer reliability (Cronbach’s α > 0.99) for VMA. Median robotic PL was 35.7 cm [interquartile range, IQR (30.8–51.0)] versus 74.1 cm [IQR (44.3–170.4)] for manual cannulation, p = 0.019. Robotic cases had a median cannulation time of 5.33 min [IQR (4.58–6.49)] versus 1.24 min [IQR (1.13–1.35)] in manual cases (p = 0.0083). Generated efficiency ratios (PL/aorto-iliac centrelines) was 1.6 (1.2–2.1) in robotic cases versus 2.6 (1.7–7.0) in manual, p = 0.031.
Conclusion
Robot-assisted contralateral gate cannulation in EVAR leads to decreased navigation path lengths and increased economy of movement compared with manual catheter techniques. The benefit could be maximised by prioritising robotic catheter shaping over habituated reliance on guidewire manipulation. Robotic technology has the potential to reduce the endovascular footprint during manipulations even for experienced operators with the added advantage of zero radiation exposure.





Similar content being viewed by others


References
Riga CV, Bicknell CD, Rolls A, Cheshire NJ, Hamady MS (2013) Robot-assisted Fenestrated Endovascular Aneurysm Repair (FEVAR) using the Magellan system. J Vasc Interv Radiol 24(3):191–196
Riga CV, Cheshire NJW, Hamady MS, Bicknell CD (2010) The role of robotic endovascular catheters in fenestrated stent grafting. J Vasc Surg 51(4):810–820
Riga C, Bicknell CD, Sidhu R, Cochennec F, Normahani P, Chadha P, Kashef E, Hamady M, Cheshire NJ (2011) Advanced catheter technology: is this the answer to overcoming the long learning curve in complex endovascular procedures. Eur J Vasc Endovasc Surg 42(4):531–538
Riga CV, Bicknell CD, Hamady MS, Cheshire NJW (2011) Evaluation of robotic endovascular catheters for arch vessel cannulation. J Vasc Surg 54(3):799–809
de Ruiter QM, Moll FL, van Herwaarden JA (2015) Current state in tracking and robotic navigation systems for application in endovascular aortic aneurysm repair. J Vasc Surg 61(1):256–264
Bismuth J, Duran C, Stankovic M, Gersak B, Lumsden AB (2013) A first-in-man study of the role of flexible robotics in overcoming navigation challenges in the iliofemoral arteries. J Vasc Surg 57(2 Suppl):14s–s19
Cochennec F, Kobeiter H, Gohel M, Marzelle J, Desgranges P, Allaire E, Becquemin JP (2015) Feasibility and safety of renal and visceral target vessel cannulation using robotically steerable catheters during complex endovascular aortic procedures. J Endovasc Ther 22(2):187–193
Bismuth J, Kashef E, Cheshire N, Lumsden AB (2011) Feasibility and safety of remote endovascular catheter navigation in a porcine model. J Endovasc Ther 18(2):243–249
Carrell T, Dastur N, Salter R, Taylor P (2012) Use of a remotely steerable "robotic" catheter in a branched endovascular aortic graft. J Vasc Surg 55(1):223–225
Rolls AE, Riga CV, Bicknell CD, Regan L, Cheshire NJ, Hamady MS (2014) Robot-assisted uterine artery embolization: a first-in-woman safety evaluation of the Magellan system. J Vasc Interv Radiol 25(12):1841–1848
Bagla S, Smirniotopoulos J, Orlando JC, Piechowiak R (2017) Robotic-assisted versus manual prostatic arterial embolization for benign prostatic hyperplasia: a comparative analysis. Cardiovasc Interv Radiol 40(3):360–365
Chinnadurai P, Duran C, Al-Jabbari O, Abu Saleh WK, Lumsden A, Bismuth J (2016) Value of C-arm cone beam computed tomography image fusion in maximizing the versatility of endovascular robotics. Ann Vasc Surg 30:138–148
Riga C, editor Safety, Feasibility and Value of the Magellan Endovascular Robot Based on Clinical Experience with 150 Cases. Veith Symposium; 2016 November 17, 2016
Lu T, Owji S, Chinnadurai P, Loh TM, Schwein A, Lumsden AB, Bismuth J (2016) Robotic-assisted coil embolization of ascending aortic pseudoaneurysm. Ann Thorac Surg 102(5):e451–e453
Bonatti J, Vetrovec G, Riga C, Wazni O, Stadler P (2014) Robotic technology in cardiovascular medicine. Nat Rev Cardiol 11(5):266–275
Schwein A, Kramer B, Chinnadurai P, Virmani N, Walker S, O'Malley M, Lumsden AB, Bismuth J (2018) Electromagnetic tracking of flexible robotic catheters enables “assisted navigation” and brings automation to endovascular navigation in an in vitro study. J Vasc Surg 67(4):1274–1281
Egi H, Okajima M, Yoshimitsu M, Ikeda S, Miyata Y, Masugami H, Kawahara T, Kaneko M, Asahara T (2008) Objective assessment of endoscopic surgical skills by analyzing direction-dependent dexterity using the Hiroshima University Endoscopic Surgical Assessment Device (HUESAD). Surg Today 38(8):705–710
Duran C, Estrada S, O'Malley M, Lumsden AB, Bismuth J (2015) Kinematics effectively delineate accomplished users of endovascular robotics with a physical training model. J Vasc Surg 61(2):535–541
Rolls AE, Riga CV, Rahim S, Stoyanov DV, Van Herzeele I, Mikhail G, Hamady M, Cheshire NJ, Bicknell CD (2017) Video motion analysis in live coronary angiography differentiates levels of experience and provides a novel method of skill assessment. EuroIntervention 13(12):e1460–e1467
Rolls AE, Riga CV, Bicknell CD, Stoyanov DV, Shah CV, Van Herzeele I, Hamady M, Cheshire NJ (2013) A pilot study of video-motion analysis in endovascular surgery: development of real-time discriminatory skill metrics. Eur J Vasc Endovasc Surg 45(5):509–515
Wolf YG, Tillich M, Lee WA, Rubin GD, Fogarty TJ, Zarins CK (2001) Impact of aortoiliac tortuosity on endovascular repair of abdominal aortic aneurysms: evaluation of 3D computer-based assessment. J Vasc Surg 34(4):594–599
Riga CV, Bicknell CD, Hamady M, Cheshire N (2012) Tortuous Iliac systems—a significant burden to conventional cannulation in the visceral segment: is there a role for robotic catheter technology? J Vasc Interv Radiol 23(10):1369–1375
Chaikof EL, Fillinger MF, Matsumura JS, Rutherford RB, White GH, Blankensteijn JD, Bernhard VM, Harris PL, Kent KC, May J, Veith FJ, Zarins CK (2002) Identifying and grading factors that modify the outcome of endovascular aortic aneurysm repair. J Vasc Surg 35(5):1061–1066
Wilson WRW, Benveniste GL (2010) EVAR technical tip—confirmation of contralateral limb gate cannulation using a moulding balloon. EJVES Extra 20(3):e25–e26
Georgakarakos E, Trellopoulos G, Ioannou CV, Tsetis D (2014) Technical challenges encountered during deployment of the ovation abdominal aortic stent-graft system. J Endovasc Ther 21(2):333–338
Maleux G, Houthoofd S, Fourneau I (2017) Use of a microcatheter to cannulate the contralateral gate in endovascular aortic repair. Vasc Endovasc Surg. https://doi.org/10.1177/1538574417697209
Aggarwal R, Crochet P, Dias A, Misra A, Ziprin P, Darzi A (2009) Development of a virtual reality training curriculum for laparoscopic cholecystectomy. Br J Surg 96(9):1086–1093
Rafii-Tari H, Riga CV, Payne CJ, Hamady MS, Cheshire NJ, Bicknell CD, Yang GZ (2016) Reducing contact forces in the arch and supra-aortic vessels using the Magellan robot. J Vasc Surg 64(5):1422–1432
Li M, Riga C, Cheung S, Burfitt N, Thomas R, Jenkins M, Cheshire NJ, Hamady M, Bicknell CD (2015) Occupational radiation exposure during FEVAR: a stage-by-stage analysis. Br J Surg 102:23–23
de Ruiter QM, Jansen MM, Moll F, Hazenberg C, Kahya N, van Herwaarden J (2018) Procedure and step-based analysis of the occupational radiation dose during endovascular aneurysm repair in the hybrid operating room. J Vasc Surg 67(6):1881–1890
Mung JC, Huang SG, Moos JM, Yen JT, Weaver FA (2013) Stereotactic endovascular aortic navigation with a novel ultrasonic-based three-dimensional localization system. J Vasc Surg 57(6):1637–1644
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors have read and approved this manuscript and there are no conflicts of interests.
Ethical approval
This study was approved by the respective Ethics Committees in each of the institutions involved and in accordance with the ethical standards of the 1964 Helsinki Declaration and its later amendments.
Informed consent
Informed consent was obtained from all study participants.
Availability of data
Available on request.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Cheung, S., Rahman, R., Bicknell, C. et al. Comparison of manual versus robot-assisted contralateral gate cannulation in patients undergoing endovascular aneurysm repair. Int J CARS 15, 2071–2078 (2020). https://doi.org/10.1007/s11548-020-02247-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-020-02247-3