
Abstract
Purpose
Most existing robot systems for pedicle screw placement rely on optical markers to establish the spatial relationship between the surgical tool and the surgical path. Marker installation and registration are time-consuming, and error may also accumulate along the complicated coordinate transformation chain. Therefore, we proposed a markerless structured light-based method to simplify the surgery workflow and the coordinate transformation chain.
Methods
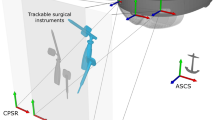
Firstly, a structured light camera is used to directly track both the surgical tool and the bone anatomy without using markers. Secondly, a markerless “two-direction” approach for robot-camera registration together with a feedback robot control method is developed. Lastly, a prototype system is built and examined with precision validation experiments and pedicle screw drilling experiments.
Results
Precision validation experiments show satisfactory positioning accuracy of the system. In drilling experiments, 42 paths were drilled on three synthesized cervical vertebrae phantoms and all the paths successfully went through the pedicles. The mean position error of the entry point was 0.28 ± 0.16 mm, and the mean angle error was 0.49 ± 0.24°, which can meet the clinical requirement.
Conclusion
The results show the feasibility of the proposed structured light-based method for pedicle screw placement, which has a simple workflow and can achieve good accuracy without using optical markers.















Similar content being viewed by others


References
Hoeckelmann M, Rudas IJ, Fiorini P, Kirchner F, Haidegger T (2015) Current capabilities and development potential in surgical robotics. Int J Adv Robot Syst 12:61. https://doi.org/10.5772/60133
Khan A, Meyers JE, Siasios I, Pollina J (2019) Next-generation robotic spine surgery: first report on feasibility, safety, and learning curve. Oper Neurosurg (Hagerstown, Md) 17(1):61–69. https://doi.org/10.1093/ons/opy280
Lefranc M, Peltier J (2016) Evaluation of the ROSA Spine robot for minimally invasive surgical procedures. Expert Rev Med Devic 13(10):899–906. https://doi.org/10.1080/17434440.2016.1236680
Ghasem A, Sharma A, Greif DN, Alam M, Al Maaieh M (2018) The arrival of robotics in spine surgery a review of the literature. Spine 43(23):1670–1677. https://doi.org/10.1097/brs.0000000000002695
Liebergall M, Mosheiff R, Joskowicz L (2014) Computer-aided orthopaedic surgery in skeletal trauma. In: Bucholz R, Heckman J, Court-Brown C (eds) Rockwood & green’s fractures in adults, 6th edn. Lippincott, Philadelphia, pp 575–608
Shamir RR, Freiman M, Joskowicz L, Spektor S, Shoshan Y (2009) Surface-based facial scan registration in neuronavigation procedures: a clinical study. J Neurosurg 111(6):1201–1206. https://doi.org/10.3171/2009.3.JNS081457
Jiang L, Zhang S, Yang J, Zhuang X, Zhang L, Gu L (2015) A robust automated markerless registration framework for neurosurgery navigation. Int J Med Robot 11(4):436–447. https://doi.org/10.1002/rcs.1626
Ballesteros-Zebadúa P, García-Garduño OA, Galván de la Cruz OO, Arellano-Reynoso A, Lárraga-Gutiérrez JM, Celis MA (2016) Assessment of an image-guided neurosurgery system using a head phantom. Br J Neurosurg 30(6):606–610. https://doi.org/10.3109/02688697.2016.1173188
Kau CH, Richmond S, Incrapera A, English J, Xia JJ (2007) Three-dimensional surface acquisition systems for the study of facial morphology and their application to maxillofacial surgery. Int J Med Robot 3(2):97–110. https://doi.org/10.1002/rcs.141
Flugge T, Derksen W, Te Poel J, Hassan B, Nelson K, Wismeijer D (2017) Registration of cone beam computed tomography data and intraoral surface scans—a prerequisite for guided implant surgery with CAD/CAM drilling guides. Clin Oral Implants Res 28(9):1113–1118. https://doi.org/10.1111/clr.12925
Luebbers H-T, Messmer P, Obwegeser JA, Zwahlen RA, Kikinis R, Graetz KW, Matthews F (2008) Comparison of different registration methods for surgical navigation in cranio-maxillofacial surgery. J Cranio-Maxillofac Surg 36(2):109–116. https://doi.org/10.1016/j.jcms.2007.09.002
Li S, Qiu G, Feng B, Cai S, Sheng L, Zhai J, Liang J (2011) Experimental study of three dimensional navigahon assisted spinal surgery by multi-segment registration technology based on structured light scanning. Natl Med J China 91(9):634–638. https://doi.org/10.1016/0042-6822(65)90178-9
Feng B, Qiu G, Li S, Zheng H, Li P, Cai S, Liang J, Sheng L (2011) Experiment study of three dimensional navigation assisted spinal surgery using structured light scanning. Chin J Orthop 31(5):530–534
Yang V, Mariampillai ALD, Standish BA, Leung MKK (2016) Integrated illumination and optical surface topology detection system and methods of use thereof. United States Patent US9513113B2, 2016-12-06
Besl PJ, McKay ND (1992) A method for registration of 3-D shapes. IEEE Trans Pattern Anal 14(2):239–256. https://doi.org/10.1109/34.121791
Rusinkiewicz S, Levoy M (2001) Efficient variants of the ICP algorithm. In: 3dim, pp 145–152
Pomerleau F, Colas F, Siegwart R (2015) A review of point cloud registration algorithms for mobile robotics. Found Trends Robot 4(1):1–104
Mellado N, Aiger D, Mitra NJ (2014) Super 4PCS fast global pointcloud registration via smart indexing. Comput Graph Forum 33(5):205–215. https://doi.org/10.1111/cgf.12446
Aiger D, Mitra NJ (2008) Cohen-Or D 4-points congruent sets for robust pairwise surface registration. In: ACM SIGGRAPH 2008 papers, Los Angeles, California. ACM, 1360684, pp 1–10. https://doi.org/10.1145/1399504.1360684
Díez Y, Roure F, Lladó X, Salvi J (2015) A qualitative review on 3D coarse registration methods. ACM Comput Surv 47(3):1–36. https://doi.org/10.1145/2692160
Smith AR (1978) Color gamut transform pairs. ACM Siggraph Comput Graph 12(3):12–19
Corke P (2017) Robotics, vision and control: fundamental algorithms in MATLAB®, vol 118, 2nd edn. Springer, Berlin. https://doi.org/10.1007/978-3-319-54413-7
Arun KS, Huang TS, Blostein SD (1987) Least-squares fitting of two 3-D point sets. IEEE Trans Pattern Anal PAMI-9(5):698–700. https://doi.org/10.1109/tpami.1987.4767965
Ebraheim NA, Xu R, Knight T, Yeasting RA (1997) Morphometric evaluation of lower cervical pedicle and its projection. Spine (Phila Pa 1976) 22(1):1–6. https://doi.org/10.1097/00007632-199701010-00001
An HS, Wise JJ, Xu R (1999) Anatomy of the cervicothoracic junction: a study of cadaveric dissection, cryomicrotomy, and magnetic resonance imaging. J Spinal Disord 12(6):519–525
Mellado N, Aiger D, Mitra NJ (2017) Super4PCSLibrary. https://github.com/nmellado/Super4PCS
Acknowledgements
This work is sponsored by Tsinghua University and Cyrus Tang Foundation.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have submitted a patent application to the agency based on the method described in this paper.
Human participants or animals
This article does not contain studies with human participants or animals performed by any of the authors.
Informed consent
This article does not contain patient data.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (WMV 39052 kb)
Appendix: Technical details for point cloud registration algorithms
Appendix: Technical details for point cloud registration algorithms
Data preprocessing
3D models of the vertebrae are reconstructed from CT data using Mimics 20.0. Point clouds of vertebrae and the surgical tool are uniformly sampled from 3D models using 3-Matic 12.0. The mean distance between the adjacent points is 0.4 mm, which is consistent with the scanned point clouds. Before registration, the segmented scanned point clouds (Figs. 2b, 4b) are denoised (built-in function “pcdenoise” of Matlab2019a, with default parameters, see https://www.mathworks.com/help/vision/ref/pcdenoise.html for more details).
Parameter setting for Super4PCS algorithm
The Super4PCSLibrary [26] is used, with registration parameters given in Table 3. As the scanned point cloud of the tool is accurately segmented, a larger overlap ratio is assigned for computational efficiency (see http://nmellado.github.io/Super4PCS/a05043.html. for more details).
Parameter setting for ICP algorithm
The built-in ICP function “pcregistericp” of Matlab2019a is used, with parameters listed in Table 4. In this basic ICP implementation, a nearest-neighbor search, an outlier check, and a rigid transformation calculation are performed in every iteration (for more details, see https://www.mathworks.com/help/vision/ref/pcregistericp.html).
The only thing we modified is the outlier checker. The built-in checker keeps the closest point pairs as inliers according to the given inlier ratio. This strategy works well for the tool, but not for the bone due to the uncertain overlap ratio resulting from manual annotations. Therefore, a hybrid outlier rejection strategy is used for bone registration, i.e., point pairs closer than the given inlier distance or within the inlier ratio are kept. On the one hand, the fixed distance threshold keeps as many valid points as possible when close to convergence. On the other hand, the inlier ratio criterion avoids the local minima caused by insufficient inliers obtained through the inlier distance criterion, especially in early iterations.
Rights and permissions
About this article

Cite this article
Zhu, S., Zhao, Z., Pan, Y. et al. Markerless robotic pedicle screw placement based on structured light tracking. Int J CARS 15, 1347–1358 (2020). https://doi.org/10.1007/s11548-020-02215-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-020-02215-x